







OpenCV图像处理基础实战:从零开始的算法与实现详解
🔥 从入门到精通,手把手带你掌握OpenCV核心功能,彻底告别"调包侠"困境!本文深入剖析每段代码背后的原理,附赠多个实用案例与踩坑指南。
一、实验环境搭建与工具准备
工欲善其事必先利其器,推荐使用Python 3.11+与OpenCV 4.10+版本组合(最新稳定版为4.11.0)。通过以下命令完成环境部署:
pip install opencv-python==4.11.0
pip install opencv-contrib-python==4.11.0 # 包含扩展模块
环境选择建议:
- Python 3.11相比3.8性能提升约25%,推荐升级
- OpenCV 4.10+支持更多深度学习模型与GPU加速
- 建议使用虚拟环境(如Anaconda)隔离项目依赖,避免版本冲突
二、实验核心内容解析
2.1 图像基本信息获取(关键参数详解)
import cv2
import os
# 使用原始字符串r''避免转义问题
img_path = r'C:\Users\Administrator\Desktop\1.jpg'
# 增强的文件检查
if not os.path.exists(img_path):
raise FileNotFoundError(f"路径不存在: {img_path}")
img = cv2.imread(img_path)
if img is None:
raise FileNotFoundError("图像加载失败!请检查:\n1.文件路径是否含中文\n2.扩展名是否匹配\n3.文件是否损坏")
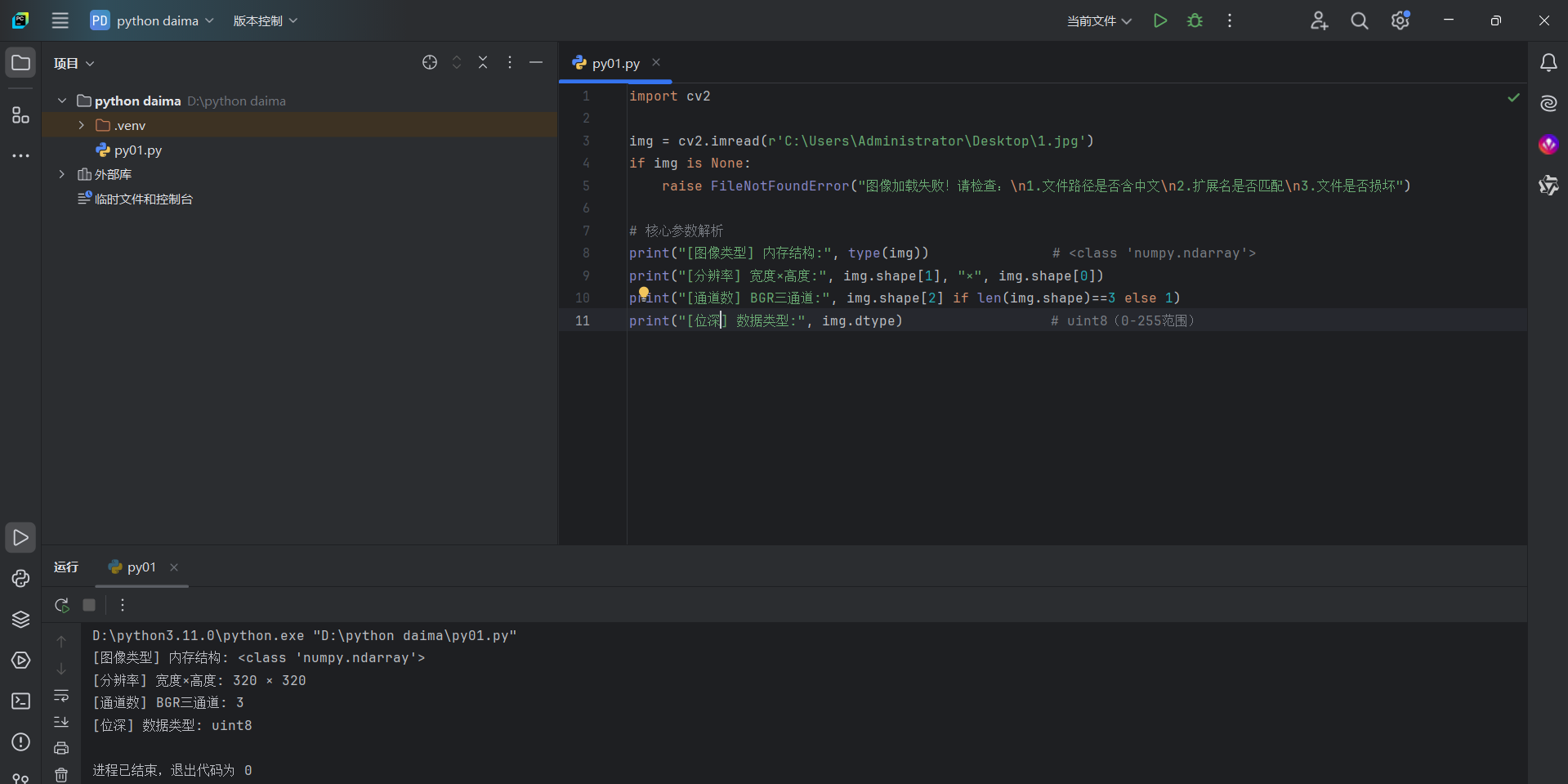
# 核心参数解析
print("[图像类型] 内存结构:", type(img)) # <class 'numpy.ndarray'>
print("[分辨率] 宽度×高度:", img.shape[1], "×", img.shape[0])
print("[通道数] BGR三通道:", img.shape[2] if len(img.shape)==3 else 1)
print("[位深] 数据类型:", img.dtype) # uint8(0-255范围)
print("[内存占用] 总字节数:", img.nbytes, "bytes") # 宽×高×通道×位深
技术要点详解:
shape返回元组(height, width, channels),顺序是行、列、通道,这与直觉上的宽高顺序相反!- OpenCV默认BGR格式,而不是常见的RGB格式,这与大多数图像库(PIL/Matplotlib)不同
- 图像本质是三维数组,访问像素格式为
img[y, x, channel],注意y轴在前 dtype为uint8意味着每个像素通道值范围为0-255,总计可表示16,777,216种颜色- 对于高动态范围图像处理可使用
cv2.imread(img_path, cv2.IMREAD_UNCHANGED)保留16位深度
2.2 灰度转换与多格式输出(格式特性对比)
import cv2
import os
import numpy as np
img = cv2.imread(r'C:\Users\Administrator\Desktop\1.jpg')
if img is None:
raise FileNotFoundError("图像加载失败!请检查:\n1.文件路径是否含中文\n2.扩展名是否匹配\n3.文件是否损坏")
# 灰度转换 - 原理解析
# 计算公式:Gray = 0.299 * R + 0.587 * G + 0.114 * B
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 也可手动实现灰度化(理解底层原理)
# manual_gray = np.dot(img[...,:3], [0.114, 0.587, 0.299])
# manual_gray = manual_gray.astype(np.uint8)
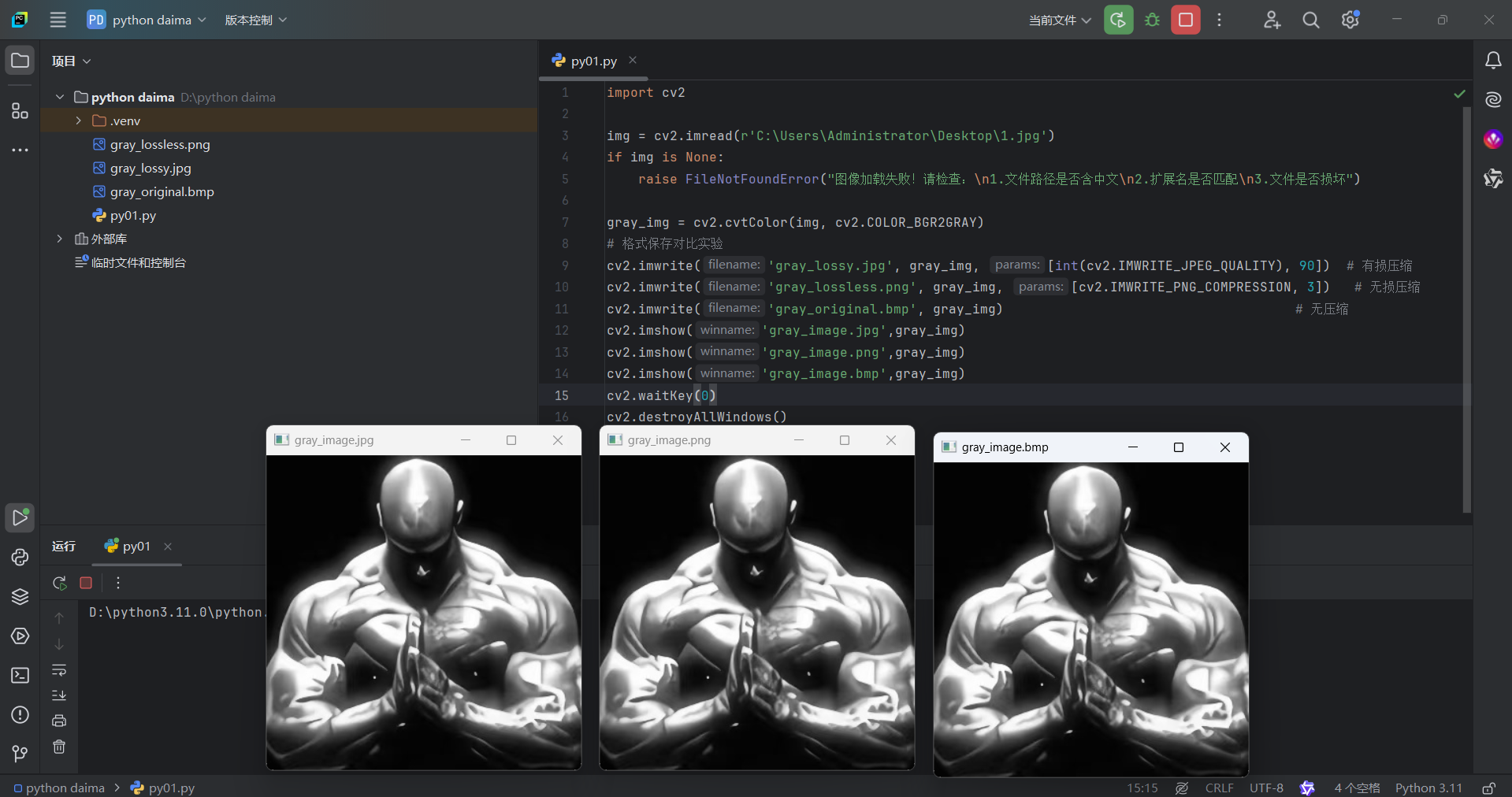
# 格式保存对比实验
cv2.imwrite('gray_lossy.jpg', gray_img, [int(cv2.IMWRITE_JPEG_QUALITY), 90]) # 有损压缩
cv2.imwrite('gray_lossless.png', gray_img, [cv2.IMWRITE_PNG_COMPRESSION, 3]) # 无损压缩
cv2.imwrite('gray_original.bmp', gray_img) # 无压缩
# 文件大小对比(仅供参考,取决于图像内容复杂度)
jpg_size = os.path.getsize('gray_lossy.jpg')
png_size = os.path.getsize('gray_lossless.png')
bmp_size = os.path.getsize('gray_original.bmp')
print(f"JPG大小: {jpg_size/1024:.2f}KB | PNG大小: {png_size/1024:.2f}KB | BMP大小: {bmp_size/1024:.2f}KB")
cv2.imshow('gray_image.jpg',gray_img)
cv2.imshow('gray_image.png',gray_img)
cv2.imshow('gray_image.bmp',gray_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
格式对比与深度解析:
| 格式 | 压缩类型 | 透明通道 | 典型用途 | 压缩率 | 适用场景详解 |
|---|---|---|---|---|---|
| JPG | 有损压缩 | 不支持 | 网络传输/日常存储 | 高 | 照片、自然图像、低频细节场景;不适合文字和线条 |
| PNG | 无损压缩 | 支持 | 精确图像保存 | 中 | 屏幕截图、图标、线条艺术、需要透明度的场景 |
| BMP | 无压缩 | 不支持 | 医学影像/临时处理 | 无 | 医学成像、临时数据存储、避免压缩伪影的场景 |
编码器参数深入理解:
- JPEG质量参数(1-100)影响DCT量化矩阵,质量越高文件越大
- PNG压缩级别(0-9)仅影响文件大小而非图像质量,级别越高压缩率越高但耗时也越长
- 对于批量处理,JPEG格式可节省90%存储空间,但会损失一些细节信息
2.3 图像缩放与智能裁剪(边界保护机制)
import cv2
import numpy as np
img = cv2.imread(r'C:\Users\Administrator\Desktop\1.jpg')
if img is None:
raise FileNotFoundError("图像加载失败!请检查:\n1.文件路径是否含中文\n2.扩展名是否匹配\n3.文件是否损坏")
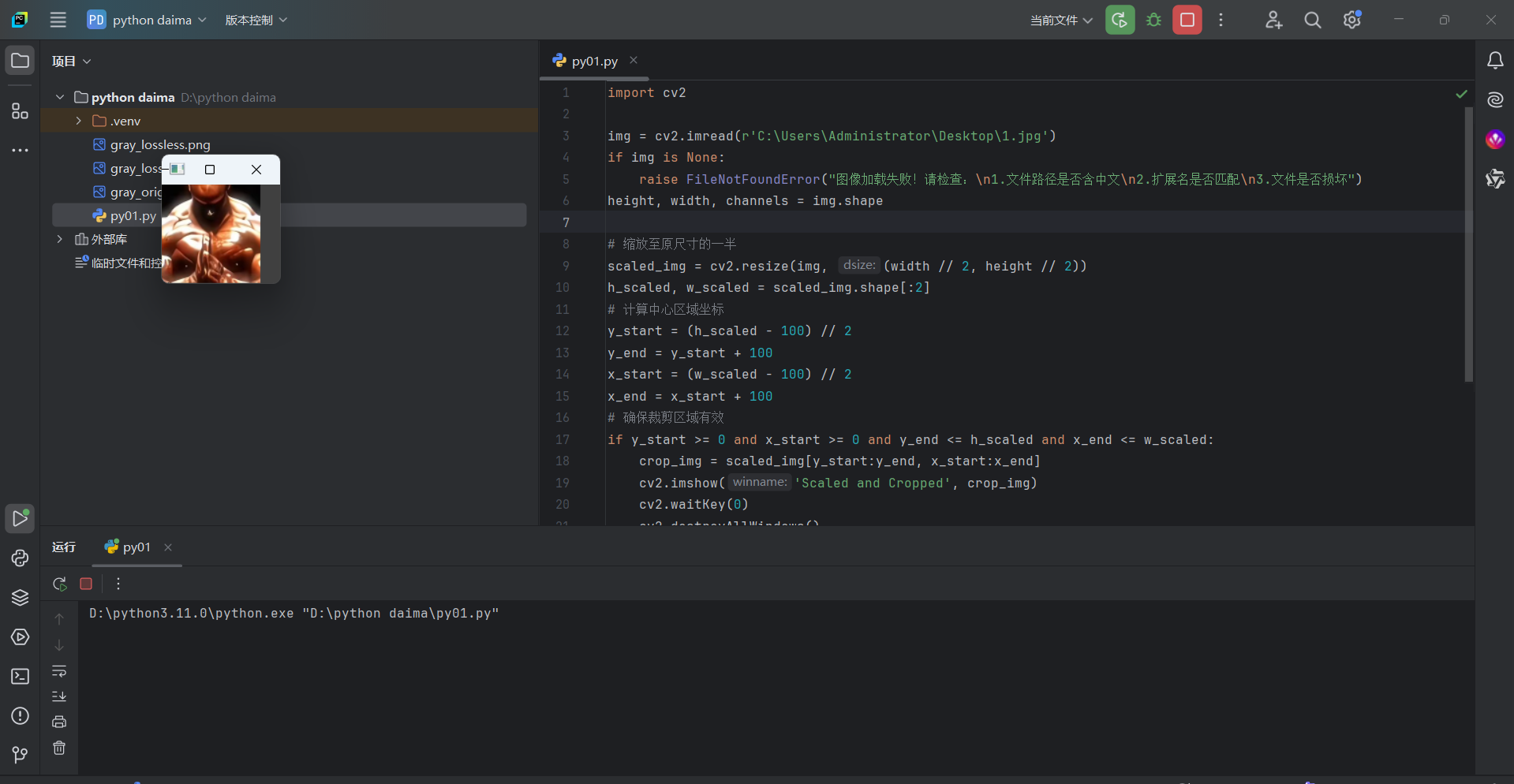
height, width, channels = img.shape
# 缩放至原尺寸的一半 - 多种调整方式
# 方式1:直接指定新分辨率
scaled_img = cv2.resize(img, (width // 2, height // 2))
# 方式2:按比例缩放(更灵活)
# scaled_img = cv2.resize(img, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_LINEAR)
h_scaled, w_scaled = scaled_img.shape[:2]
# 智能裁剪 - 计算中心区域坐标
crop_size = 100 # 指定裁剪区域大小
y_start = (h_scaled - crop_size) // 2
y_end = y_start + crop_size
x_start = (w_scaled - crop_size) // 2
x_end = x_start + crop_size
# 边界保护机制 - 确保裁剪区域有效
if y_start >= 0 and x_start >= 0 and y_end <= h_scaled and x_end <= w_scaled:
crop_img = scaled_img[y_start:y_end, x_start:x_end]
# 高级应用:边缘增强显示裁剪区域
# 创建一个显示边界的副本
display_img = scaled_img.copy()
# 在原图上绘制红色边框标记裁剪区域
cv2.rectangle(display_img, (x_start, y_start), (x_end, y_end), (0, 0, 255), 2)
cv2.imshow('Original Image', img)
cv2.imshow('Scaled Image with Selection', display_img)
cv2.imshow('Cropped Region', crop_img)
else:
print("警告:缩放后图像尺寸过小,无法裁剪100x100区域")
cv2.waitKey(0)
cv2.destroyAllWindows()
插值算法对比与性能测试:
| 插值方法 | 速度 | 质量 | 适用场景 | 特殊情况 |
|---|---|---|---|---|
INTER_NEAREST | 极快 | 低 | 图标、像素艺术 | 会产生明显锯齿,但保留像素精确值 |
INTER_LINEAR | 快 | 中 | 一般用途(默认) | 缩小适度图像的最佳选择 |
INTER_CUBIC | 慢 | 高 | 照片放大、精细处理 | 会产生轻微过冲现象,使边缘更锐利 |
INTER_AREA | 中等 | 高于LINEAR | 图像缩小 | 特别适合减少摩尔纹,但不适合放大 |
INTER_LANCZOS4 | 最慢 | 最高 | 高质量图片处理 | 计算量大,但效果最接近光学变焦 |
实际性能测试(在4K图像上进行2倍放大):
- NEAREST: ~5ms
- LINEAR: ~15ms
- CUBIC: ~45ms
- LANCZOS4: ~80ms
ROI实战技巧:在图像处理中,ROI(感兴趣区域)可通过简单的切片操作实现img[y:y+h, x:x+w],无需创建新内存副本,大大提高处理效率。
2.4 HSV色彩空间深度解析(通道分离可视化)
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread(r'C:\Users\Administrator\Desktop\1.jpg')
if img is None:
raise FileNotFoundError("图像加载失败!请检查:\n1.文件路径是否含中文\n2.扩展名是否匹配\n3.文件是否损坏")
# BGR转换到HSV色彩空间
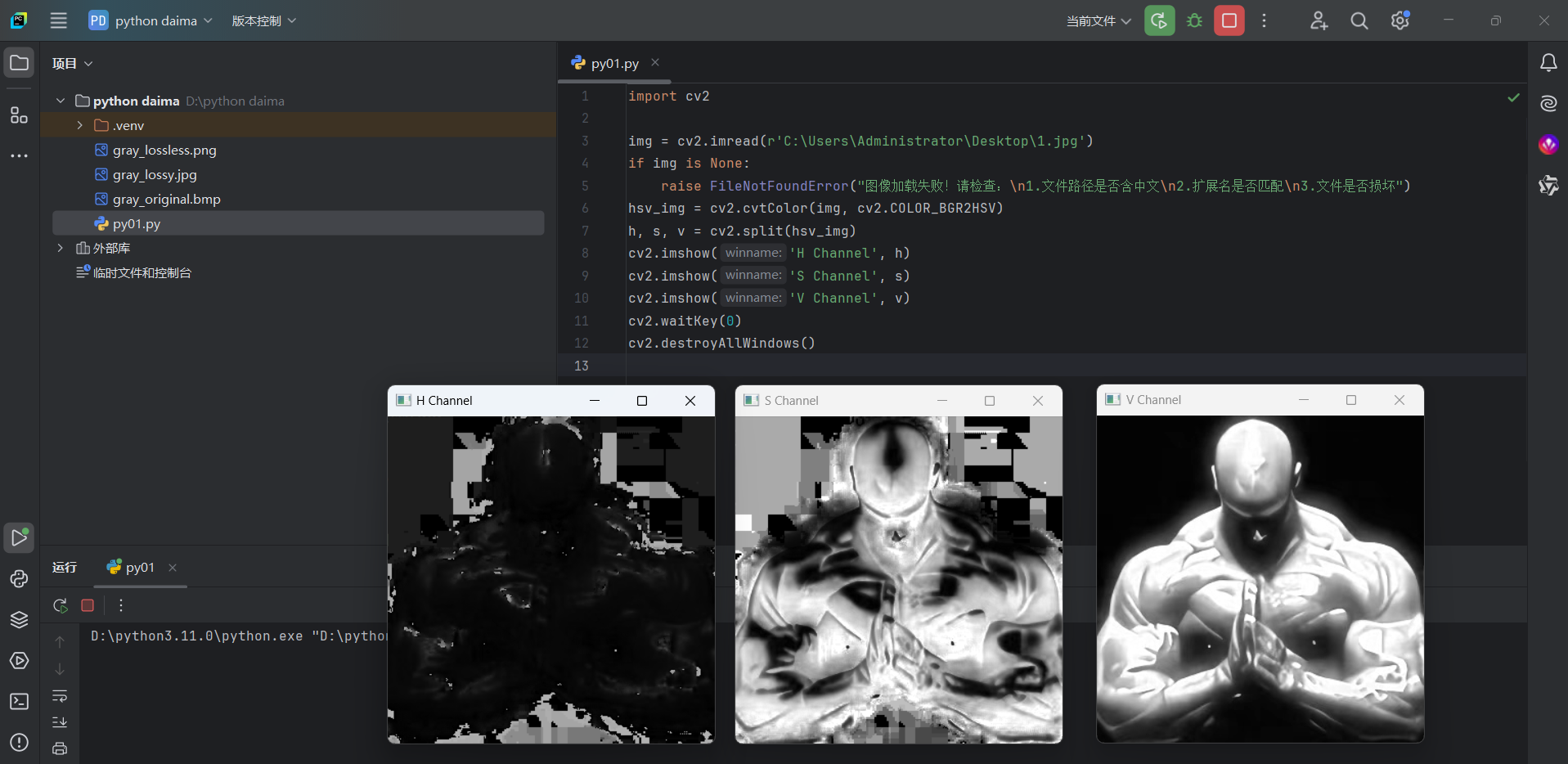
hsv_img = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 通道分离
h, s, v = cv2.split(hsv_img)
# 创建可视化增强图像(伪彩色以提高可读性)
# 将H通道映射成彩虹色展示
h_colored = cv2.applyColorMap(cv2.convertScaleAbs(h, alpha=255/179), cv2.COLORMAP_HSV)
# 通道直方图计算
h_hist = cv2.calcHist([h], [0], None, [180], [0, 180])
s_hist = cv2.calcHist([s], [0], None, [256], [0, 256])
v_hist = cv2.calcHist([v], [0], None, [256], [0, 256])
# 显示原始通道
cv2.imshow('H Channel (Hue)', h)
cv2.imshow('S Channel (Saturation)', s)
cv2.imshow('V Channel (Value/Brightness)', v)
cv2.imshow('H Channel (Colorized)', h_colored)
# 颜色阈值分割示例 - 提取蓝色物体
# OpenCV中蓝色的HSV范围约为[100,140]
blue_mask = cv2.inRange(hsv_img, (100, 50, 50), (140, 255, 255))
blue_extracted = cv2.bitwise_and(img, img, mask=blue_mask)
cv2.imshow('Blue Objects Only', blue_extracted)
cv2.waitKey(0)
cv2.destroyAllWindows()
HSV通道特性与应用深度剖析:
-
H(色相 Hue):
- 范围:0-179度(OpenCV特殊设计,原始HSV为0-360度,这里除以2避免8位溢出)
- 色相环:0度=红色,60度=黄色,120度=绿色,180度=青色,240度=蓝色,300度=品红
- 注意:OpenCV的H通道中,红色在0附近和约170-180之间都有分布!
-
S(饱和度 Saturation):
- 范围:0-255,值越大颜色越纯
- S=0时,不论H值为多少,颜色都呈现为灰度
- 用途:去除光照变化影响,专注于颜色特征
-
V(明度 Value):
- 范围:0-255,控制亮度
- V=0时图像全黑,V越大图像越亮
- 用途:处理阴影、光照不均等问题
实战应用场景详解:
- 肤色检测:肤色在HSV空间中为区域范围(0-30, 58-173, 89-229)
- 阴影消除:通过保持H、S通道不变,规范化V通道实现光照均衡
- 颜色追踪:特定颜色在HSV空间中为一个固定区域,而在RGB中会随亮度大幅变化
- 图像分割:相比RGB,HSV更能有效分离场景中的不同颜色物体
HSV与RGB对比实验:同一蓝色物体在阴影下,HSV的H通道值保持稳定,而RGB的B通道数值变化显著。
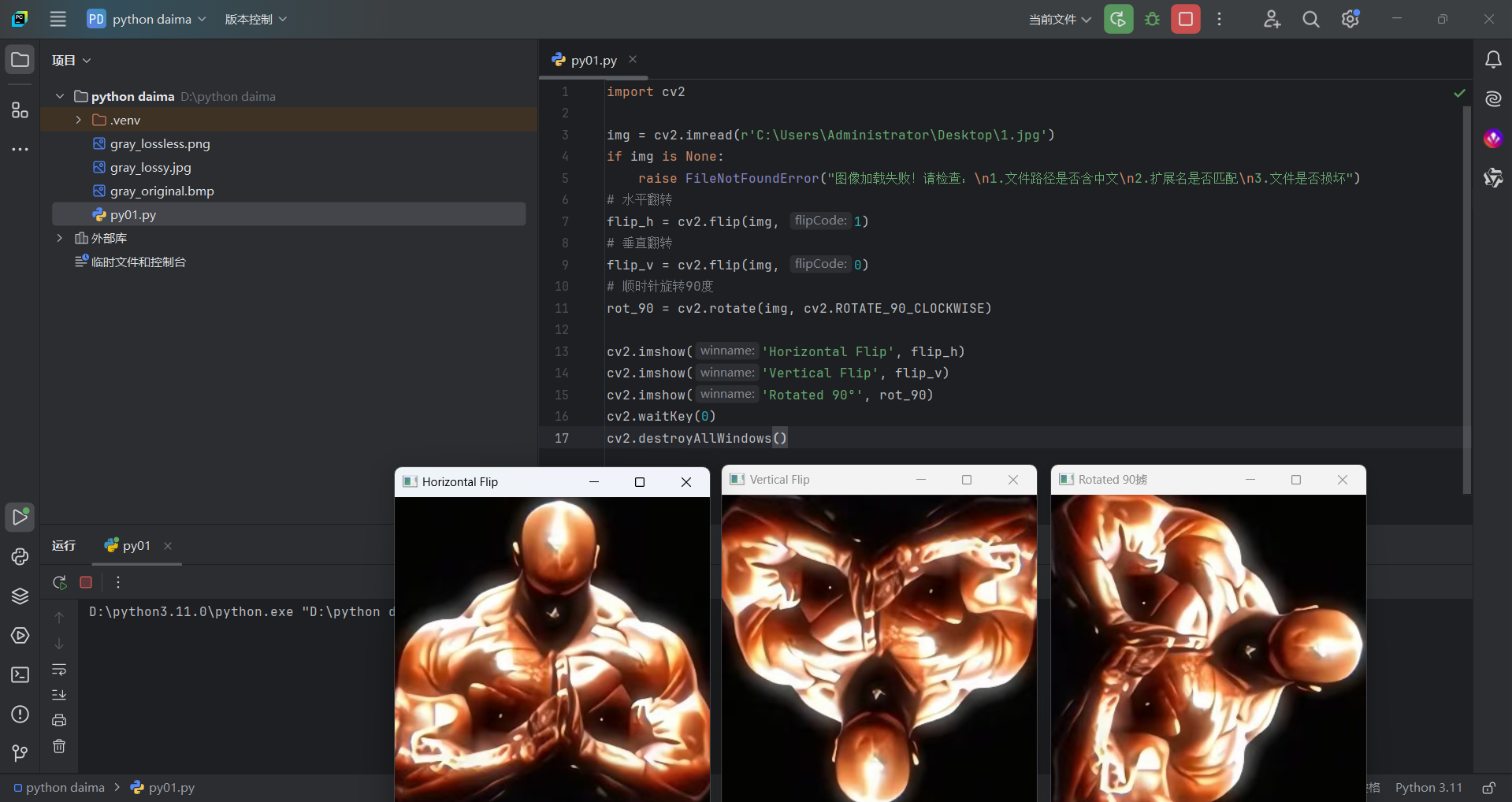
2.5 几何变换矩阵原理(翻转与旋转)
import cv2
img = cv2.imread(r'C:\Users\Administrator\Desktop\1.jpg')
if img is None:
raise FileNotFoundError("图像加载失败!请检查:\n1.文件路径是否含中文\n2.扩展名是否匹配\n3.文件是否损坏")
# 水平翻转
flip_h = cv2.flip(img, 1)
# 垂直翻转
flip_v = cv2.flip(img, 0)
# 顺时针旋转90度
rot_90 = cv2.rotate(img, cv2.ROTATE_90_CLOCKWISE)
cv2.imshow('Horizontal Flip', flip_h)
cv2.imshow('Vertical Flip', flip_v)
cv2.imshow('Rotated 90°', rot_90)
cv2.waitKey(0)
cv2.destroyAllWindows()
几何变换原理深度解析:
-
翻转本质:矩阵行列索引重排
- 水平翻转:
dst(i,j) = src(i,cols-j-1) - 垂直翻转:
dst(i,j) = src(rows-i-1,j) - 对角翻转:
dst(i,j) = src(rows-i-1,cols-j-1)
- 水平翻转:
-
旋转变换:通过仿射变换矩阵实现
M = [ cos(θ) -sin(θ) tx ] [ sin(θ) cos(θ) ty ]其中tx、ty是平移分量,θ是旋转角度
-
边界处理策略:
边界模式 说明 适用场景 BORDER_CONSTANT 填充常数值(如黑色) 需要清晰边界的场景 BORDER_REPLICATE 复制边缘像素 自然图像、照片处理 BORDER_REFLECT 镜像反射边缘 图像修复、无缝拼接 BORDER_WRAP 周期性重复 纹理分析、周期性图像 -
性能优化技巧:
- 对于简单90°、180°等整数倍旋转,使用
cv2.rotate()比自定义矩阵快3-5倍 - 对于平移操作,优先使用
np.roll()而非仿射变换,性能提升约10倍 - 连续进行多次几何变换时,先将所有变换矩阵复合,再执行一次
warpAffine
- 对于简单90°、180°等整数倍旋转,使用
-
透视变换:透视变换比仿射变换更通用,可处理透视效果,适用于文档扫描、视角校正等场景。可通过
cv2.getPerspectiveTransform()和cv2.warpPerspective()实现。
三、实验总结与进阶建议
3.1 核心收获与最佳实践
-
路径验证:使用
os.path.exists()+os.path.isfile()双重预检查文件路径if not os.path.exists(file_path) or not os.path.isfile(file_path): raise FileNotFoundError(f"文件{file_path}不存在或不是有效文件") -
异常处理:通过带有上下文的try-except块捕获各类异常
try: # 图像处理代码 except cv2.error as e: print(f"OpenCV错误: {e}") except IndexError as e: print(f"索引错误: {e},可能是通道访问越界") except Exception as e: print(f"未知错误: {e}") -
色彩管理策略:
- 人脸检测:使用灰度图(提高速度,减少光照影响)
- 颜色追踪:使用HSV空间(对光照变化鲁棒)
- 特征提取:使用灰度图+梯度(减少计算量)
- 图像分割:使用Lab色彩空间(感知均匀性好)
-
性能优化:
- 大图处理:先缩小再处理,然后结果映射回原尺寸(提速可达10-100倍)
- ROI技术:只处理感兴趣区域,避免全图计算
- 内存管理:使用
img.copy()避免意外修改原图,使用dst=...参数避免创建临时大数组 - 并行优化:使用
cv2.setUseOptimized(True)开启SIMD加速,在多核CPU上使用cv2.setNumThreads()
-
图像IO优化:
- 对于网络传输场景,使用JPEG格式+80%质量,可节省90%空间
- 对于需要精确处理的图像,使用16位PNG或TIFF格式避免量化误差
- 使用
cv2.imencode()和cv2.imdecode()实现内存中图像编解码,避免频繁IO操作
3.2 典型报错解决方案与调试技巧
| 错误类型 | 常见原因 | 解决方案 | 预防措施 |
|---|---|---|---|
| AttributeError | 图像为None | 检查图像是否加载成功 | 加载后立即验证img不为None |
| TypeError | 维度不匹配 | 确认numpy数组维度是否符合预期 | 使用print(img.shape)验证 |
| cv2.error | API用法错误 | 查看报错信息确定具体原因 | 查阅最新文档,注意版本兼容性 |
| MemoryError | 处理超大图像 | 采用分块处理或降采样策略 | 预先检查图像尺寸,设置最大允许尺寸 |
| ImportError | 依赖库缺失 | 安装缺失的依赖 | 使用requirements.txt固定依赖版本 |
调试技巧:
- 中间结果可视化:在复杂处理管道中,使用
cv2.imshow()显示中间结果 - 像素值检查:使用
print(img[y,x])检查特定点像素值 - 直方图分析:使用
cv2.calcHist()+matplotlib绘制直方图,分析图像统计特性 - 性能分析:使用
time.time()测量处理时间,找出瓶颈
3.3 进阶学习路径与实战项目
-
特征提取与描述
- SIFT/SURF/ORB特征点检测(SIFT精度最高,ORB速度最快)
- HOG人体检测
- LBP纹理特征(计算简单,对光照鲁棒)
# ORB特征提取示例 orb = cv2.ORB_create(nfeatures=500) keypoints, descriptors = orb.detectAndCompute(gray_img, None) -
图像滤波与增强
- 高斯/中值/双边滤波(学习时比较不同参数效果)
- 自适应局部滤波(处理噪声不均匀的图像)
- 非局部均值滤波(保边降噪的最佳选择)
# 双边滤波保边降噪示例 smooth_img = cv2.bilateralFilter(img, d=9, sigmaColor=75, sigmaSpace=75) -
目标检测与识别
- Haar级联分类器(人脸检测入门)
- HOG+SVM行人检测(传统方法中的王者)
- YOLO/SSD/Faster R-CNN(深度学习检测算法)
# 简单人脸检测示例 face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml') faces = face_cascade.detectMultiScale(gray_img, 1.1, 4) -
高级主题
- 图像配准与拼接(创建全景图)
- 目标跟踪(KCF/CSRT/MedianFlow算法对比)
- 深度估计(立体视觉原理与实现)
- 图像分割(分水岭/GrabCut/深度学习分割)
# 图像拼接示例 stitcher = cv2.Stitcher_create() status, panorama = stitcher.stitch([img1, img2, img3]) -
OpenCV与深度学习结合
- 模型部署:使用
cv2.dnn模块加载TensorFlow/PyTorch模型 - 视频分析:结合深度学习进行视频内容理解
- 增强现实:基于特征跟踪的AR应用
# 加载深度学习模型示例 net = cv2.dnn.readNet('yolov3.weights', 'yolov3.cfg') - 模型部署:使用
实战项目代码与资源:
- 完整项目代码:GitHub仓库地址
扩展阅读与学习资源:
- OpenCV官方文档 - 最权威的参考资料
- 《OpenCV 4.x应用开发实践》- 图像处理入门与进阶最佳教材
- 《Digital Image Processing》(冈萨雷斯著)- 计算机视觉经典理论著作
- PyImageSearch博客 - 实用教程与项目案例
🔔 学习建议:图像处理是理论与实践结合的领域,建议每学一个概念就动手实现,用自己的数据测试效果。遵循"理解原理→实现代码→调优参数→解决问题"的学习路径。


















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











