






1.模型建立与化简
框图化简是将复杂系统转化为典型环节传递函数,实现系统建模的一种等效交换方法
1.1 串联结构
G1 = tf([2,5,1],[1,2,3]);
G2 = zpk(-2,-10,5);
G = G1*G2
结果:
G =
10 (s+2.281) (s+2) (s+0.2192)
-----------------------------
(s+10) (s^2 + 2s + 3)
连续时间零点/极点/增益模型。
1.2 并联结构
% 并联结构
G1 = tf([2,5,1],[1,2,3]);
G2 = zpk(-2,-10,5);
G = G1+G2
结果:
G =
7 (s+0.6837) (s^2 + 5.745s + 8.358)
-----------------------------------
(s+10) (s^2 + 2s + 3)
连续时间零点/极点/增益模型。
1.3 反馈结构
%反馈结构
G1 = tf([2,5,1],[1,2,3]);
G2 = zpk(-2,-10,5);
G = feedback(G1,G2,-1) % 1表示正反馈,-1表示负反馈,默认为负反馈
结果:
G = 0.18182 (s+0.2192) (s+2.281) (s+10) ----------------------------------- (s+3.419) (s^2 + 1.763s + 1.064) 连续时间零点/极点/增益模型。
1.4 复杂结构
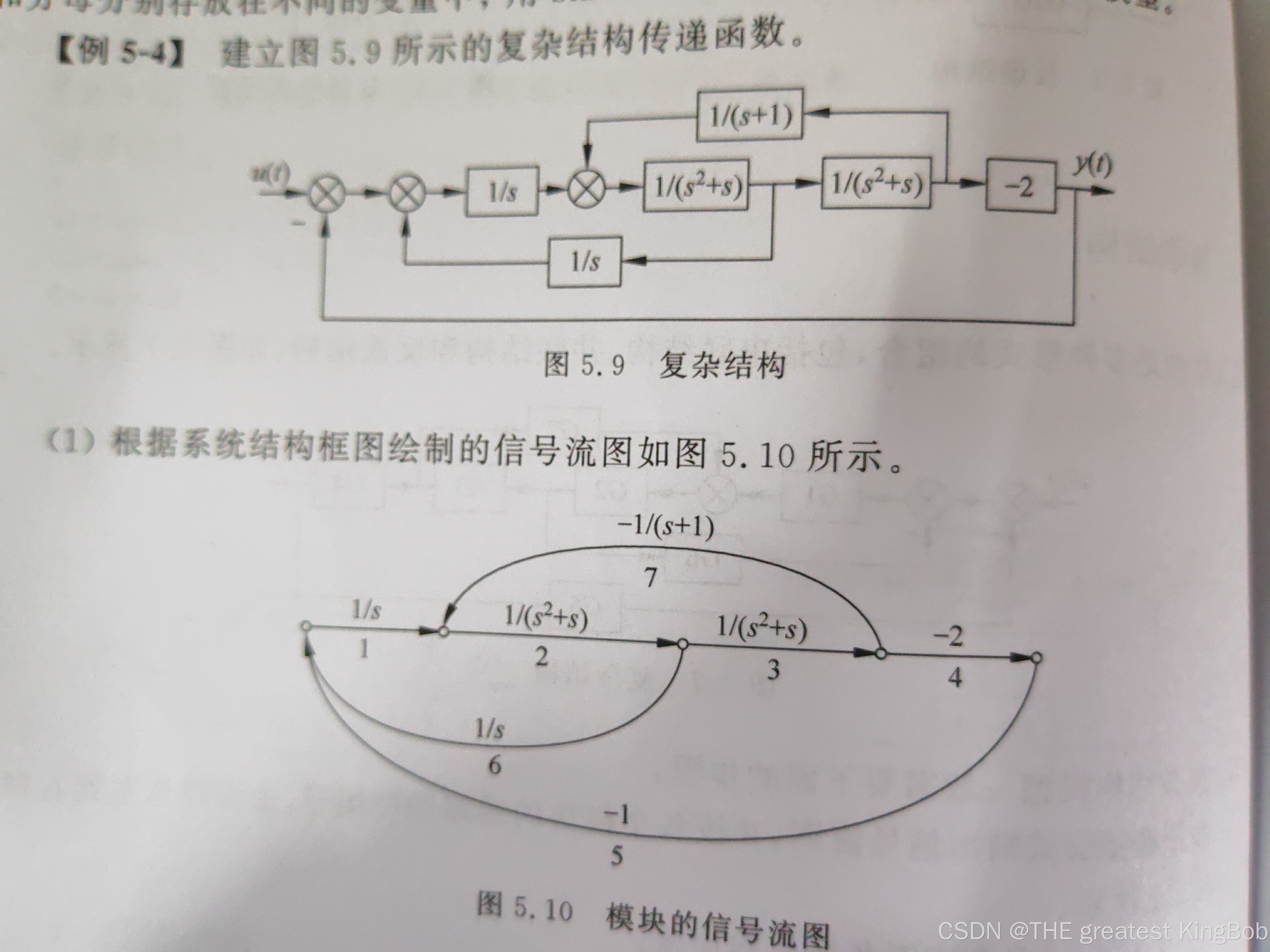
%复杂结构
% 1.使用append命令实现各模块的链接
G1 = tf(1,[1,0]); G2 = tf(1,[1,1,0]); G3 = tf(1,[1,1,0]); G4 = tf(-2,1); G5 = tf(-1,1); G6 = tf(1,[1,0]); G7 = tf(-1,[1,1]);
Sys = append(G1,G2,G3,G4,G5,G6,G7);
% 2.指定各模块链接关系
Q = [1,6,5; %第一列为模块通路编号,后面则为进入该节点的模块的通路编号
2,1,7;
3,2,0;
4,3,0;
5,4,0;
6,2,0;
7,3,0];
% 3.指定系统总体输入/输出
INPUTS = 1;
OUTPUTS = 4;
% 4.使用connect命令建立整个系统的模型
G = connect(Sys,Q,INPUTS,OUTPUTS)
结果:
G =
A =
x1 x2 x3 x4 x5 x6 x7
x1 0 0 0 0 2 1 0
x2 1 -1 0 0 0 0 -1
x3 0 1 0 0 0 0 0
x4 0 0 1 -1 0 0 0
x5 0 0 0 1 0 0 0
x6 0 0 1 0 0 0 0
x7 0 0 0 0 1 0 -1
B =
u1
x1 1
x2 0
x3 0
x4 0
x5 0
x6 0
x7 0
C =
x1 x2 x3 x4 x5 x6 x7
y1 0 0 0 0 -2 0 0
D =
u1
y1 0
连续时间状态空间模型。
不知道为什么是一堆矩阵???

















 1524
1524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









