







1.介绍
博客hyshhh:重构pointpillar(PCDet)中神经网络部分的代码逻辑中我对pointpillar网络进行了重构,其中因为源代码中定义多层11卷集时用了多层循环网络,外层循环定义33卷集网络,内层循环定义1*1卷集模块。在可观性和实用性有所欠缺。
因此提出了一种可变层卷集,加了一个层数参数以调节1*1层,代码见附录
2.使用方法
在定义模块时定义卷集层
在网络定义函数引入实例化

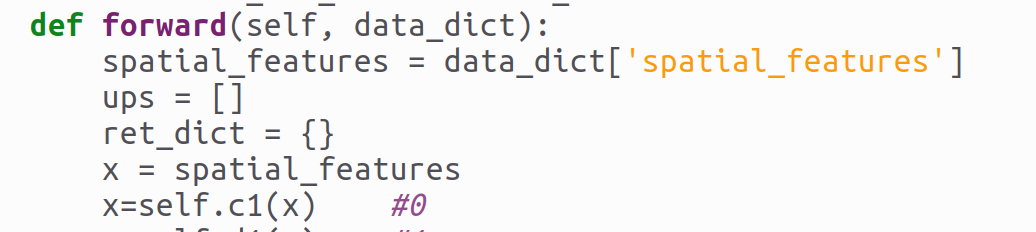
在前向传播中使用
3.附录
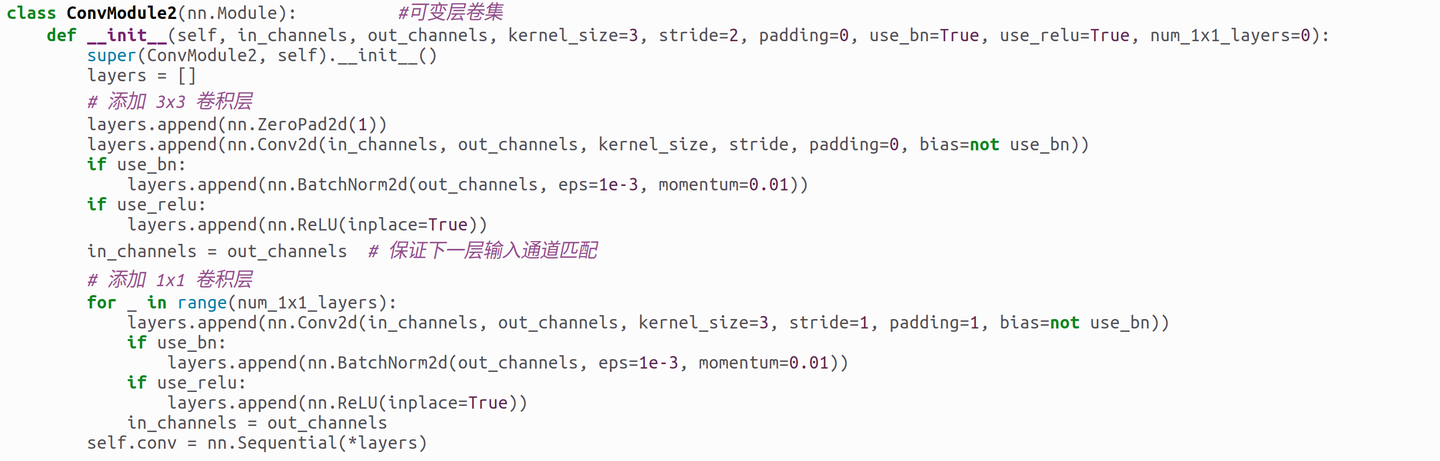
class ConvModule2(nn.Module): #可变层卷集
def __init__(self, in_channels, out_channels, kernel_size=3, stride=2, padding=0, use_bn=True, use_relu=True, num_1x1_layers=0):
super(ConvModule2, self).__init__()
layers = []
# 添加 3x3 卷积层
layers.append(nn.ZeroPad2d(1))
layers.append(nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding=0, bias=not use_bn))
if use_bn:
layers.append(nn.BatchNorm2d(out_channels, eps=1e-3, momentum=0.01))
if use_relu:
layers.append(nn.ReLU(inplace=True))
in_channels = out_channels # 保证下一层输入通道匹配
# 添加 1x1 卷积层
for _ in range(num_1x1_layers):
layers.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=not use_bn))
if use_bn:
layers.append(nn.BatchNorm2d(out_channels, eps=1e-3, momentum=0.01))
if use_relu:
layers.append(nn.ReLU(inplace=True))
in_channels = out_channels
self.conv = nn.Sequential(*layers)

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









