






一、本篇简单介绍:
(1)基于锚框 和 无锚框的关系
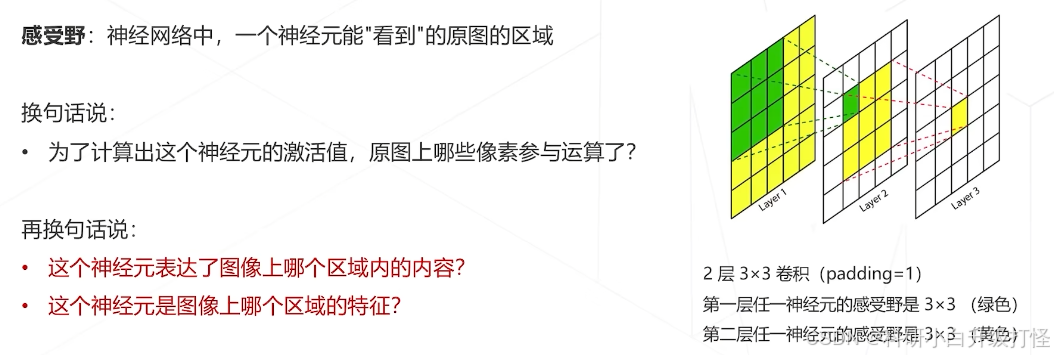
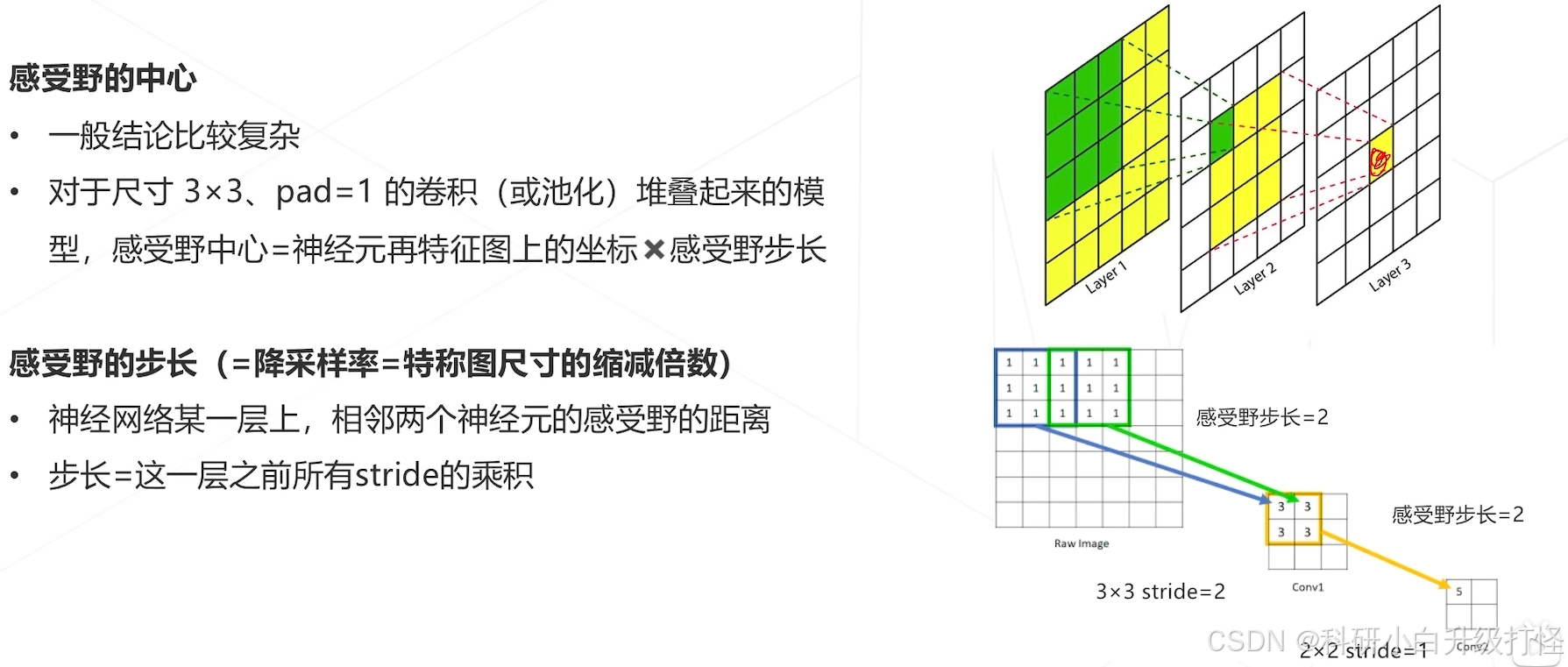
(2)什么是感受野,感受野的中心、步长怎么计算
(3)简单了解目标检测算法的发展进程以及流程
二、目标检测算法的发展历程:从滑窗到密集预测
(一)滑窗 sliding window
(1)设定多个固定大小的窗口(方便检测不同尺度的目标)
(2)用这些窗口去遍历图像的所有位置,所到之处,都用卷积网络识别窗口中的内容
缺点:计算成本高,会有很多冗余的计算
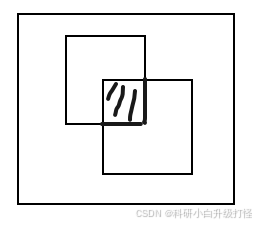
图中阴影部分会重复的经过卷积,属于冗余计算
(二)密集预测
简单来说,密集预测就是一次性的计算出所有位置的卷积
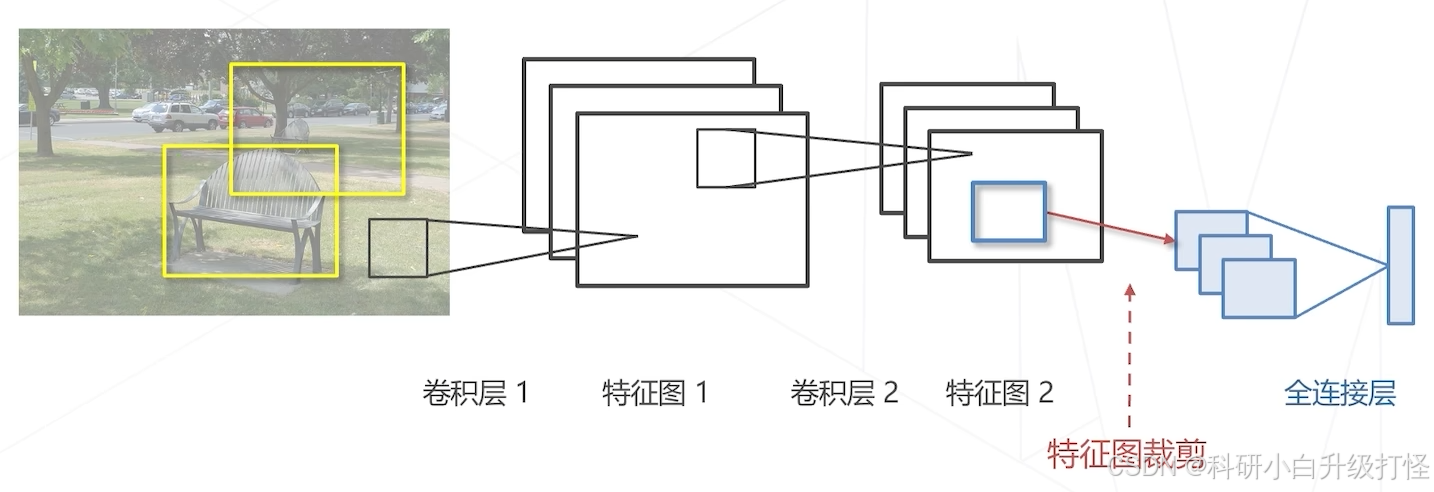
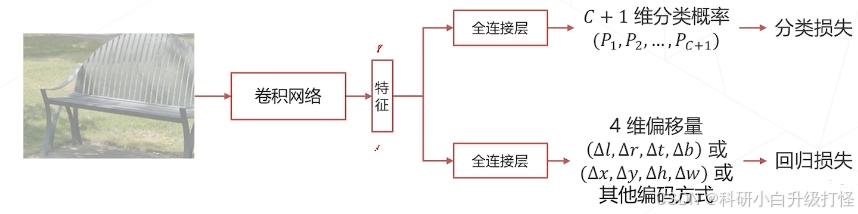
一次性的经过卷积之后,从特征图上的像素点找其对应到原图上的感受野,然后去看原图感受野中包含了什么物体:
(1)要对感受野进行分类,即类别预测
(2)要对感受野进行回归预测
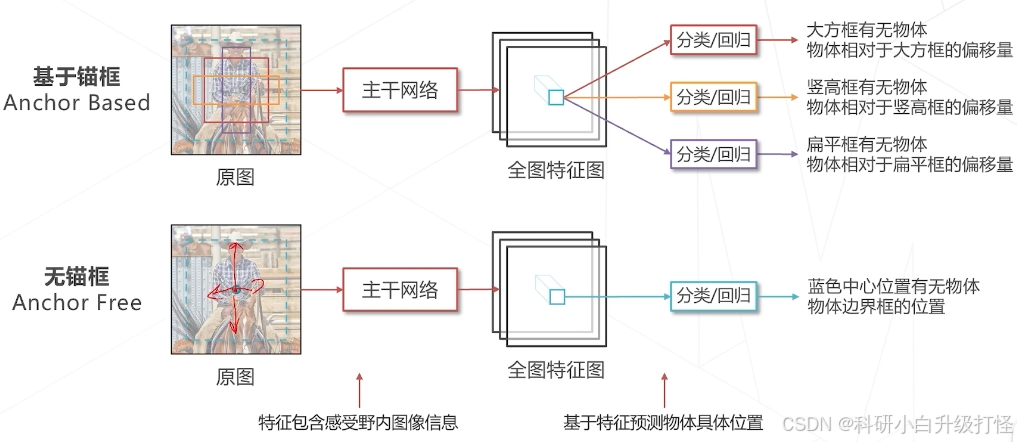
 而对于边界框回归有两种套路:基于锚框 和 无锚框
而对于边界框回归有两种套路:基于锚框 和 无锚框
基于锚框、无锚框
基于锚框:就是在图像上会生成很多大小不同的锚框,然后在特征图上去做分类回归预测是基于锚框去做的,比如这个人相较于这个紫色的框的偏移量有多少要给预测出来。
而无锚框的方法是直接去回归物体边界相对于感受野中心的距离。
三、感受野
感受野的中心和步长的计算:
参考链接:

















 646
646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









