






文章目录
一,I2C总线通信协议
1,什么是I2C协议
I2C 通讯协议(Inter-Integrated Circuit)是由 Phiilps 公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要 USART、CAN 等通讯协议的外部收发设备,现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
2,I2C 协议的物理层和协议层
①物理层
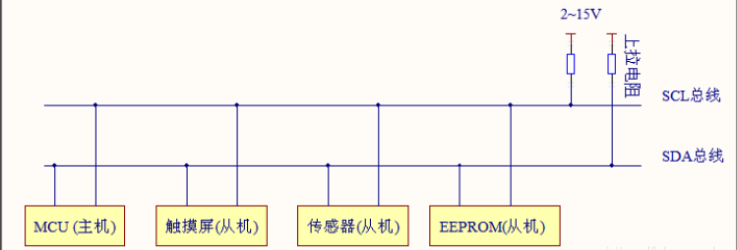
I2C是一个支持设备的总线。可连接多个 I2C 通讯设备,支持多个通讯主机及多个通讯从机。对于I2C 总线,只使用两条总线线路,一条双向串行数据线(SDA) ,一条串行时钟线(SCL)。
I2C 通讯设备常用连接方式
②协议层
主要是定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等。
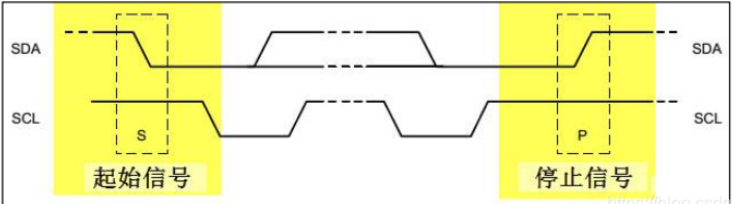
通讯的起始和停止信号
数据有效性
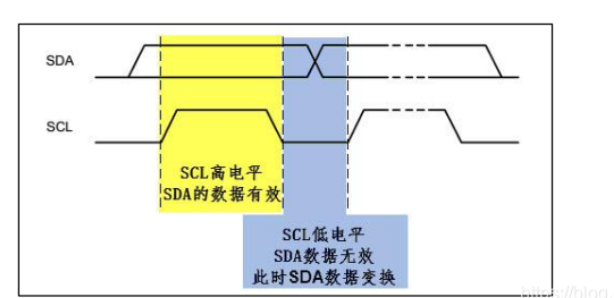
从图中可以看出I2C在通讯的时候,只有在SCL处于高电平时,SDA的数据传输才是有效的。SDA 信号线是用于传输数据,SCL 信号线是保证数据同步。
响应
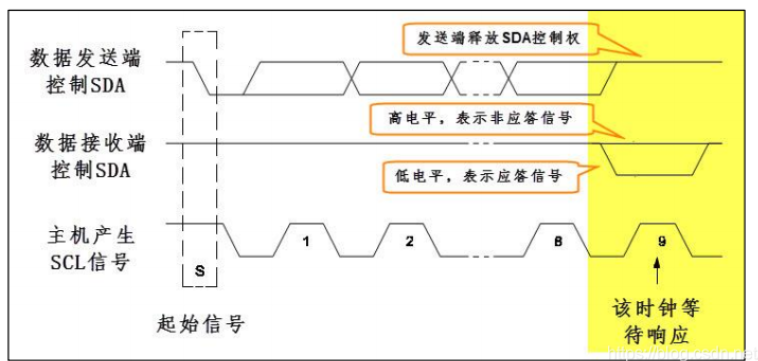
当SDA传输数据后,接收方对接受到的数据进行一个应答。如果希望继续进行传输数据,则回应应答信号(低电平),否则回应非应答信号(高电平)。
3,I2C的两种方式——硬件I2C和软件I2C
①硬件I2C
直接利用 STM32 芯片中的硬件 I2C 外设。
硬件I2C的使用
只要配置好对应的寄存器,外设就会产生标准串口协议的时序。在初始化好 I2C 外设后,只需要把某寄存器位置 1,此时外设就会控制对应的 SCL 及 SDA 线自动产生 I2C 起始信号,不需要内核直接控制引脚的电平。
②软件I2C
直接使用 CPU 内核按照 I2C 协议的要求控制 GPIO 输出高低电平,从而模拟I2C。
软件I2C的使用
需要在控制产生 I2C 的起始信号时,控制作为 SCL 线的 GPIO 引脚输出高电平,然后控制作为 SDA 线的 GPIO 引脚在此期间完成由高电平至低电平的切换,最后再控制SCL 线切换为低电平,这样就输出了一个标准的 I2C 起始信号。
③两者的差别
硬件 I2C 直接使用外设来控制引脚,可以减轻 CPU 的负担。不过使用硬件I2C 时必须使用某些固定的引脚作为 SCL 和 SDA,软件模拟 I2C 则可以使用任意 GPIO 引脚,相对比较灵活。对于硬件I2C用法比较复杂,软件I2C的流程更清楚一些。如果要详细了解I2C的协议,使用软件I2C可能更好的理解这个过程。在使用I2C过程,硬件I2C可能通信更加快,更加稳定。
二,实现AHT20采集程序
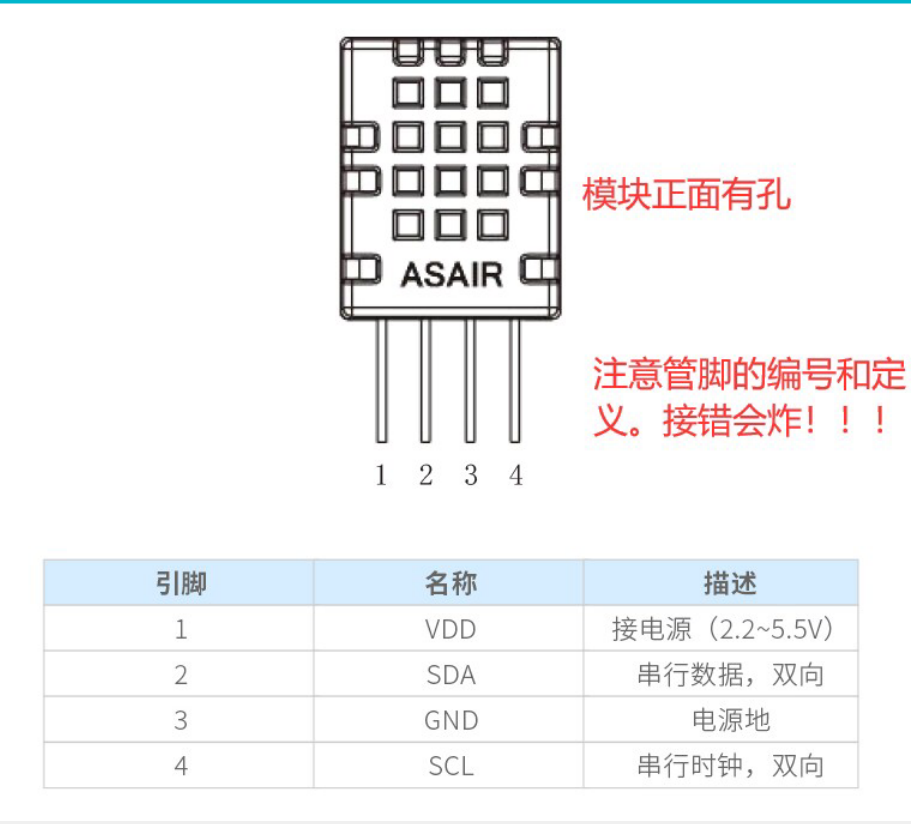
1,连接硬件
AHT20的SCL,GND,SDA,VCC分别对应接stm32f103指南者i2c模块的B6,GND,B7,5V。
2,代码实现
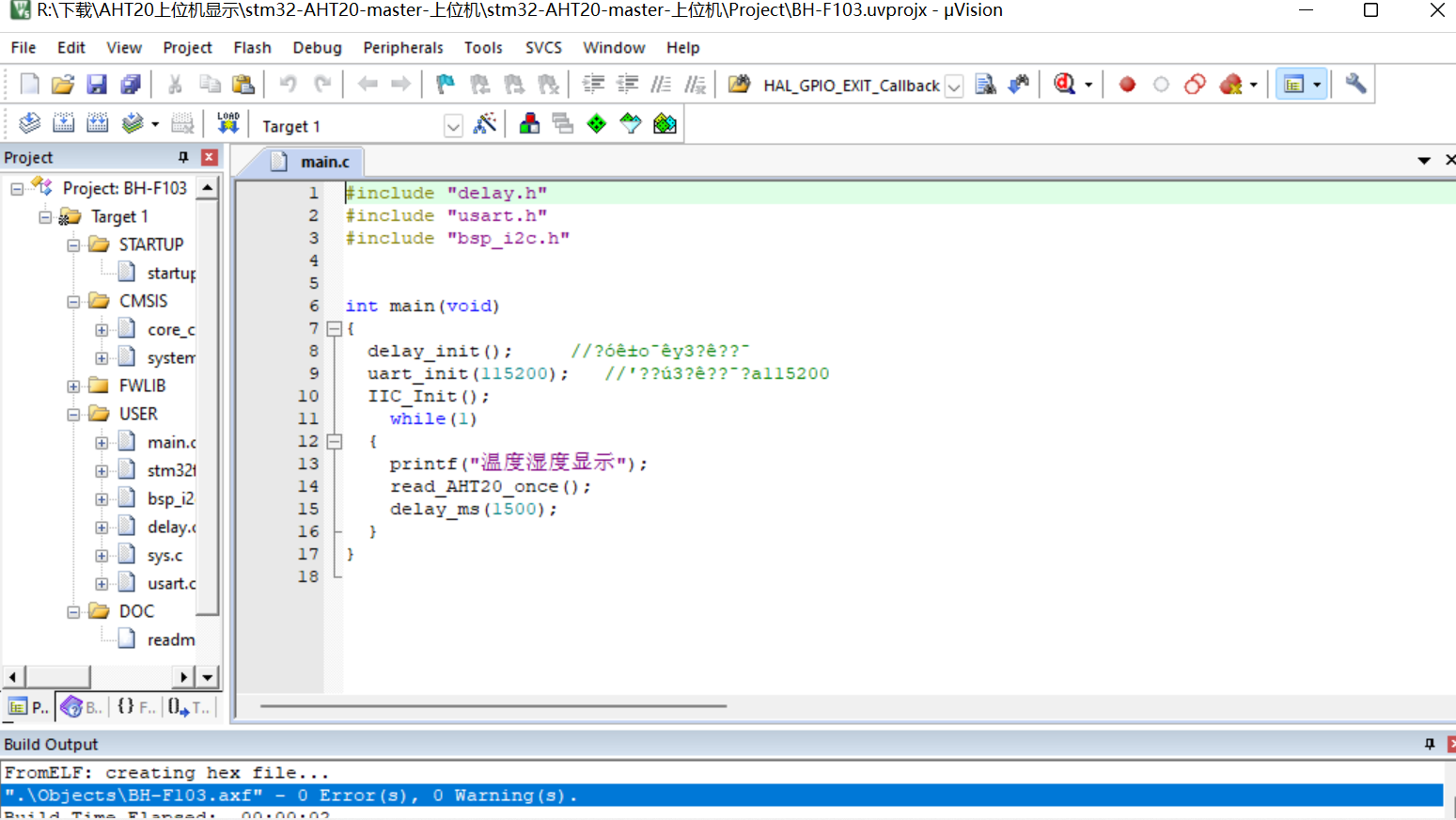
此处在固件库版的空白工程上进行添加代码,并实现以下功能:每隔2秒钟采集一次温湿度数据,并通过串口发送到上位机。
main.c
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"
int main(void)
{
delay_init(); //ÑÓʱº¯Êý³õʼ»¯
uart_init(115200); //´®¿Ú³õʼ»¯Îª115200
IIC_Init();
while(1)
{
printf("¿ªÊ¼²âÁ¿£¬ÇëÉԵȣº");
read_AHT20_once();
delay_ms(1500);
}
}
usart.c
#include "sys.h"
#include "usart.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯
//
//
//¼ÓÈëÒÔÏ´úÂë,Ö§³Öprintfº¯Êý,¶ø²»ÐèҪѡÔñuse MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//±ê×¼¿âÐèÒªµÄÖ§³Öº¯Êý
struct __FILE
{
int handle;
};
FILE __stdout;
//¶¨Òå_sys_exit()ÒÔ±ÜÃâʹÓðëÖ÷»úģʽ
void _sys_exit(int x)
{
x = x;
}
//Öض¨Òåfputcº¯Êý
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï
USART1->DR = (u8) ch;
return ch;
}
#endif
/*ʹÓÃmicroLibµÄ·½·¨*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //Èç¹ûʹÄÜÁ˽ÓÊÕ
//´®¿Ú1ÖжϷþÎñ³ÌÐò
//×¢Òâ,¶ÁÈ¡USARTx->SRÄܱÜÃâĪÃûÆäÃîµÄ´íÎó
u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.
//½ÓÊÕ״̬
//bit15£¬ ½ÓÊÕÍê³É±êÖ¾
//bit14£¬ ½ÓÊÕµ½0x0d
//bit13~0£¬ ½ÓÊÕµ½µÄÓÐЧ×Ö½ÚÊýÄ¿
u16 USART_RX_STA=0; //½ÓÊÕ״̬±ê¼Ç
void uart_init(u32 bound){
//GPIO¶Ë¿ÚÉèÖÃ
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓ
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC ÅäÖÃ
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//ÇÀÕ¼ÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //×ÓÓÅÏȼ¶3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
//USART ³õʼ»¯ÉèÖÃ
USART_InitStructure.USART_BaudRate = bound;//Ò»°ãÉèÖÃΪ9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽ
USART_InitStructure.USART_StopBits = USART_StopBits_1;//Ò»¸öֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆ
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½
USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿Ú
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ
USART_Cmd(USART1, ENABLE); //ʹÄÜ´®¿Ú
}
void USART1_IRQHandler(void) //´®¿Ú1ÖжϷþÎñ³ÌÐò
{
u8 Res;
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //½ÓÊÕÖжÏ(½ÓÊÕµ½µÄÊý¾Ý±ØÐëÊÇ0x0d 0x0a½áβ)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //¶ÁÈ¡½ÓÊÕµ½µÄÊý¾Ý
if((USART_RX_STA&0x8000)==0)//½ÓÊÕδÍê³É
{
if(USART_RX_STA&0x4000)//½ÓÊÕµ½ÁË0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//½ÓÊÕ´íÎó,ÖØпªÊ¼
else USART_RX_STA|=0x8000; //½ÓÊÕÍê³ÉÁË
}
else //»¹Ã»ÊÕµ½0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//½ÓÊÕÊý¾Ý´íÎó,ÖØпªÊ¼½ÓÊÕ
}
}
}
}
#ifdef OS_TICKS_PER_SEC //Èç¹ûʱÖÓ½ÚÅÄÊý¶¨ÒåÁË,˵Ã÷ҪʹÓÃucosIIÁË.
OSIntExit();
#endif
}
#endif
usart.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//STM32¿ª·¢°å
//´®¿Ú1³õʼ»¯
#define USART_REC_LEN 200 //¶¨Òå×î´ó½ÓÊÕ×Ö½ÚÊý 200
#define EN_USART1_RX 1 //ʹÄÜ£¨1£©/½ûÖ¹£¨0£©´®¿Ú1½ÓÊÕ
extern u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.Ä©×Ö½ÚΪ»»Ðзû
extern u16 USART_RX_STA; //½ÓÊÕ״̬±ê¼Ç
//Èç¹ûÏë´®¿ÚÖжϽÓÊÕ£¬Ç벻ҪעÊÍÒÔϺ궨Òå
void uart_init(u32 bound);
#endif
bsp_i2c.c
#include "bsp_i2c.h"
#include "delay.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//²úÉúIICÆðʼÐźÅ
void IIC_Start(void)
{
SDA_OUT(); //sdaÏßÊä³ö
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//ǯסI2C×ÜÏߣ¬×¼±¸·¢ËÍ»ò½ÓÊÕÊý¾Ý
}
//²úÉúIICÍ£Ö¹ÐźÅ
void IIC_Stop(void)
{
SDA_OUT();//sdaÏßÊä³ö
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//·¢ËÍI2C×ÜÏß½áÊøÐźÅ
delay_us(4);
}
//µÈ´ýÓ¦´ðÐźŵ½À´
//·µ»ØÖµ£º1£¬½ÓÊÕÓ¦´ðʧ°Ü
// 0£¬½ÓÊÕÓ¦´ð³É¹¦
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDAÉèÖÃΪÊäÈë
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//ʱÖÓÊä³ö0
return 0;
}
//²úÉúACKÓ¦´ð
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//²»²úÉúACKÓ¦´ð
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC·¢ËÍÒ»¸ö×Ö½Ú
//·µ»Ø´Ó»úÓÐÎÞÓ¦´ð
//1£¬ÓÐÓ¦´ð
//0£¬ÎÞÓ¦´ð
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//ÀµÍʱÖÓ¿ªÊ¼Êý¾Ý´«Êä
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //¶ÔTEA5767ÕâÈý¸öÑÓʱ¶¼ÊDZØÐëµÄ
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//¶Á1¸ö×Ö½Ú£¬ack=1ʱ£¬·¢ËÍACK£¬ack=0£¬·¢ËÍnACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDAÉèÖÃΪÊäÈë
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//·¢ËÍnACK
else
IIC_Ack(); //·¢ËÍACK
return receive;
}
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{
IIC_Start();
if(device_addr==0xA0) //eepromµØÖ·´óÓÚ1×Ö½Ú
IIC_Send_Byte(0xA0 + ((addr/256)<<1));//·¢Ë͸ߵØÖ·
else
IIC_Send_Byte(device_addr); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(data); //·¢ËÍ×Ö½Ú
IIC_Wait_Ack();
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
if(device_addr==0xA0) //
delay_ms(10);
else
delay_us(2);
}
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //¶Á¼Ä´æÆ÷»ò¶ÁÊý¾Ý
{
uint16_t data;
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(device_addr+1); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
if(ByteNumToRead == 1)//LM75ζÈÊý¾ÝΪ11bit
{
data=IIC_Read_Byte(0);
}
else
{
data=IIC_Read_Byte(1);
data=(data<<8)+IIC_Read_Byte(0);
}
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
return data;
}
/**********
*ÉÏÃ沿·ÖΪIO¿ÚÄ£¿éI2CÅäÖÃ
*
*´ÓÕâÒÔÏ¿ªÊ¼ÎªAHT20µÄÅäÖÃI2C
*º¯ÊýÃûÓÐIICºÍI2CµÄÇø±ð£¬Çë×¢Ò⣡£¡£¡£¡£¡
*
*2020/2/23×îºóÐÞ¸ÄÈÕÆÚ
*
***********/
void read_AHT20_once(void)
{
delay_ms(10);
reset_AHT20();
delay_ms(10);
init_AHT20();
delay_ms(10);
startMeasure_AHT20();
delay_ms(80);
read_AHT20();
delay_ms(5);
}
void reset_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("1");
else printf("1-n-");
I2C_WriteByte(0xBA);
ack_status = Receive_ACK();
if(ack_status) printf("2");
else printf("2-n-");
I2C_Stop();
/*
AHT20_OutData[0] = 0;
AHT20_OutData[1] = 0;
AHT20_OutData[2] = 0;
AHT20_OutData[3] = 0;
*/
}
void init_AHT20(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("3");
else printf("3-n-");
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status) printf("4");
else printf("4-n-");
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status) printf("5");
else printf("5-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("6");
else printf("6-n-");
I2C_Stop();
}
void startMeasure_AHT20(void)
{
//------------
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("7");
else printf("7-n-");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status) printf("8");
else printf("8-n-");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status) printf("9");
else printf("9-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("10");
else printf("10-n-");
I2C_Stop();
}
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("ʧ°ÜÁË");
}
printf("\r\n");
printf("ζÈ:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("ʪ¶È:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");
}
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
IIC_SCL = 0;
SDA_IN();
delay_us(4);
IIC_SCL = 1;
delay_us(4);
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
if(cnt<100)
{
result=1;
}
return result;
}
void Send_ACK(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
void SendNot_Ack(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
SDA_OUT();
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
//delaymm(10);
}
else
{
IIC_SDA = 0;
//delaymm(10);
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
//resultByte = resultByte | a;
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
void set_AHT20sendOutData(void)
{
/* --------------------------
* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)
* And Check (1 byte)
* -------------------------*/
AHT20sendOutData[3] = AHT20_OutData[0];
AHT20sendOutData[4] = AHT20_OutData[1];
AHT20sendOutData[5] = AHT20_OutData[2];
AHT20sendOutData[6] = AHT20_OutData[3];
// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;
// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 0;
delay_ms(4);
}
void I2C_Stop(void)
{
SDA_OUT();
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
}
bsp_i2c.h
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "sys.h"
#include "delay.h"
#include "usart.h"
//ʹÓÃIIC1 ¹ÒÔØM24C02,OLED,LM75AD,HT1382 PB6,PB7
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
//IO²Ù×÷º¯Êý
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ÊäÈëSDA
//IICËùÓвÙ×÷º¯Êý
void IIC_Init(void); //³õʼ»¯IICµÄIO¿Ú
void IIC_Start(void); //·¢ËÍIIC¿ªÊ¼ÐźÅ
void IIC_Stop(void); //·¢ËÍIICÍ£Ö¹ÐźÅ
void IIC_Send_Byte(u8 txd); //IIC·¢ËÍÒ»¸ö×Ö½Ú
u8 IIC_Read_Byte(unsigned char ack);//IIC¶ÁÈ¡Ò»¸ö×Ö½Ú
u8 IIC_Wait_Ack(void); //IICµÈ´ýACKÐźÅ
void IIC_Ack(void); //IIC·¢ËÍACKÐźÅ
void IIC_NAck(void); //IIC²»·¢ËÍACKÐźÅ
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//¼Ä´æÆ÷µØÖ·£¬Æ÷¼þµØÖ·£¬Òª¶ÁµÄ×Ö½ÚÊý
void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endif
delay.c
#include "delay.h"
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//Èç¹ûʹÓÃucos,Ôò°üÀ¨ÏÂÃæµÄÍ·Îļþ¼´¿É.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos ʹÓÃ
#endif
//
//STM32¿ª·¢°å
//ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí
//°üÀ¨delay_us,delay_ms
//
static u8 fac_us=0;//usÑÓʱ±¶³ËÊý
static u16 fac_ms=0;//msÑÓʱ±¶³ËÊý
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
//systickÖжϷþÎñº¯Êý,ʹÓÃucosʱÓõ½
void SysTick_Handler(void)
{
OSIntEnter(); //½øÈëÖжÏ
OSTimeTick(); //µ÷ÓÃucosµÄʱÖÓ·þÎñ³ÌÐò
OSIntExit(); //´¥·¢ÈÎÎñÇл»ÈíÖжÏ
}
#endif
//³õʼ»¯ÑÓ³Ùº¯Êý
//µ±Ê¹ÓÃucosµÄʱºò,´Ëº¯Êý»á³õʼ»¯ucosµÄʱÖÓ½ÚÅÄ
//SYSTICKµÄʱÖӹ̶¨ÎªHCLKʱÖÓµÄ1/8
//SYSCLK:ϵͳʱÖÓ
void delay_init()
{
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
u32 reload;
#endif
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //Ñ¡ÔñÍⲿʱÖÓ HCLK/8
fac_us=SystemCoreClock/8000000; //ΪϵͳʱÖÓµÄ1/8
#ifdef OS_CRITICAL_METHOD //Èç¹ûOS_CRITICAL_METHOD¶¨ÒåÁË,˵Ã÷ʹÓÃucosIIÁË.
reload=SystemCoreClock/8000000; //ÿÃëÖӵļÆÊý´ÎÊý µ¥Î»ÎªK
reload*=1000000/OS_TICKS_PER_SEC;//¸ù¾ÝOS_TICKS_PER_SECÉ趨Òç³öʱ¼ä
//reloadΪ24λ¼Ä´æÆ÷,×î´óÖµ:16777216,ÔÚ72MÏÂ,Ô¼ºÏ1.86s×óÓÒ
fac_ms=1000/OS_TICKS_PER_SEC;//´ú±íucos¿ÉÒÔÑÓʱµÄ×îÉÙµ¥Î»
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //¿ªÆôSYSTICKÖжÏ
SysTick->LOAD=reload; //ÿ1/OS_TICKS_PER_SECÃëÖжÏÒ»´Î
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //¿ªÆôSYSTICK
#else
fac_ms=(u16)fac_us*1000;//·ÇucosÏÂ,´ú±íÿ¸ömsÐèÒªµÄsystickʱÖÓÊý
#endif
}
#ifdef OS_CRITICAL_METHOD //ʹÓÃÁËucos
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOADµÄÖµ
ticks=nus*fac_us; //ÐèÒªµÄ½ÚÅÄÊý
tcnt=0;
told=SysTick->VAL; //¸Õ½øÈëʱµÄ¼ÆÊýÆ÷Öµ
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow;//ÕâÀï×¢ÒâÒ»ÏÂSYSTICKÊÇÒ»¸öµÝ¼õµÄ¼ÆÊýÆ÷¾Í¿ÉÒÔÁË.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break;//ʱ¼ä³¬¹ý/µÈÓÚÒªÑÓ³ÙµÄʱ¼ä,ÔòÍ˳ö.
}
};
}
//ÑÓʱnms
//nms:ÒªÑÓʱµÄmsÊý
void delay_ms(u16 nms)
{
if(OSRunning==TRUE)//Èç¹ûosÒѾÔÚÅÜÁË
{
if(nms>=fac_ms)//ÑÓʱµÄʱ¼ä´óÓÚucosµÄ×îÉÙʱ¼äÖÜÆÚ
{
OSTimeDly(nms/fac_ms);//ucosÑÓʱ
}
nms%=fac_ms; //ucosÒѾÎÞ·¨ÌṩÕâôСµÄÑÓʱÁË,²ÉÓÃÆÕͨ·½Ê½ÑÓʱ
}
delay_us((u32)(nms*1000)); //ÆÕͨ·½Ê½ÑÓʱ,´ËʱucosÎÞ·¨Æô¶¯µ÷¶È.
}
#else//²»ÓÃucosʱ
//ÑÓʱnus
//nusΪҪÑÓʱµÄusÊý.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //ʱ¼ä¼ÓÔØ
SysTick->VAL=0x00; //Çå¿Õ¼ÆÊýÆ÷
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷
SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
//ÑÓʱnms
//×¢ÒânmsµÄ·¶Î§
//SysTick->LOADΪ24λ¼Ä´æÆ÷,ËùÒÔ,×î´óÑÓʱΪ:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLKµ¥Î»ÎªHz,nmsµ¥Î»Îªms
//¶Ô72MÌõ¼þÏÂ,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms;//ʱ¼ä¼ÓÔØ(SysTick->LOADΪ24bit)
SysTick->VAL =0x00; //Çå¿Õ¼ÆÊýÆ÷
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //¿ªÊ¼µ¹Êý
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16)));//µÈ´ýʱ¼äµ½´ï
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //¹Ø±Õ¼ÆÊýÆ÷
SysTick->VAL =0X00; //Çå¿Õ¼ÆÊýÆ÷
}
#endif
delay.h
#ifndef __DELAY_H
#define __DELAY_H
#include "sys.h"
//
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//ʹÓÃSysTickµÄÆÕͨ¼ÆÊýģʽ¶ÔÑÓ³Ù½øÐйÜÀí
//°üÀ¨delay_us,delay_ms
//
void delay_init(void);
void delay_ms(u16 nms);
void delay_us(u32 nus);
#endif
sys.c
#include "sys.h"
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//STM32¿ª·¢°å
//ϵͳÖжϷÖ×éÉèÖû¯
//********************************************************************************
void NVIC_Configuration(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶
}
sys.h
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"
//
//STM32F103ºËÐÄ°åÀý³Ì
//¿âº¯Êý°æ±¾Àý³Ì
/********** mcudev.taobao.com ³öÆ· ********/
//
//0,²»Ö§³Öucos
//1,Ö§³Öucos
#define SYSTEM_SUPPORT_UCOS 0 //¶¨ÒåϵͳÎļþ¼ÐÊÇ·ñÖ§³ÖUCOS
//λ´ø²Ù×÷,ʵÏÖ51ÀàËƵÄGPIO¿ØÖƹ¦ÄÜ
//¾ßÌåʵÏÖ˼Ïë,²Î¿¼<<CM3ȨÍþÖ¸ÄÏ>>µÚÎåÕÂ(87Ò³~92Ò³).
//IO¿Ú²Ù×÷ºê¶¨Òå
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO¿ÚµØÖ·Ó³Éä
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
//IO¿Ú²Ù×÷,Ö»¶Ôµ¥Ò»µÄIO¿Ú!
//È·±£nµÄֵСÓÚ16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //Êä³ö
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //ÊäÈë
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //Êä³ö
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //ÊäÈë
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //Êä³ö
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //ÊäÈë
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //Êä³ö
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //ÊäÈë
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //Êä³ö
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //ÊäÈë
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //Êä³ö
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //ÊäÈë
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //Êä³ö
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //ÊäÈë
void NVIC_Configuration(void);
#endif
然后把usart.c,bsp_i2c.c,delay.c,sys.c加到工程文件中
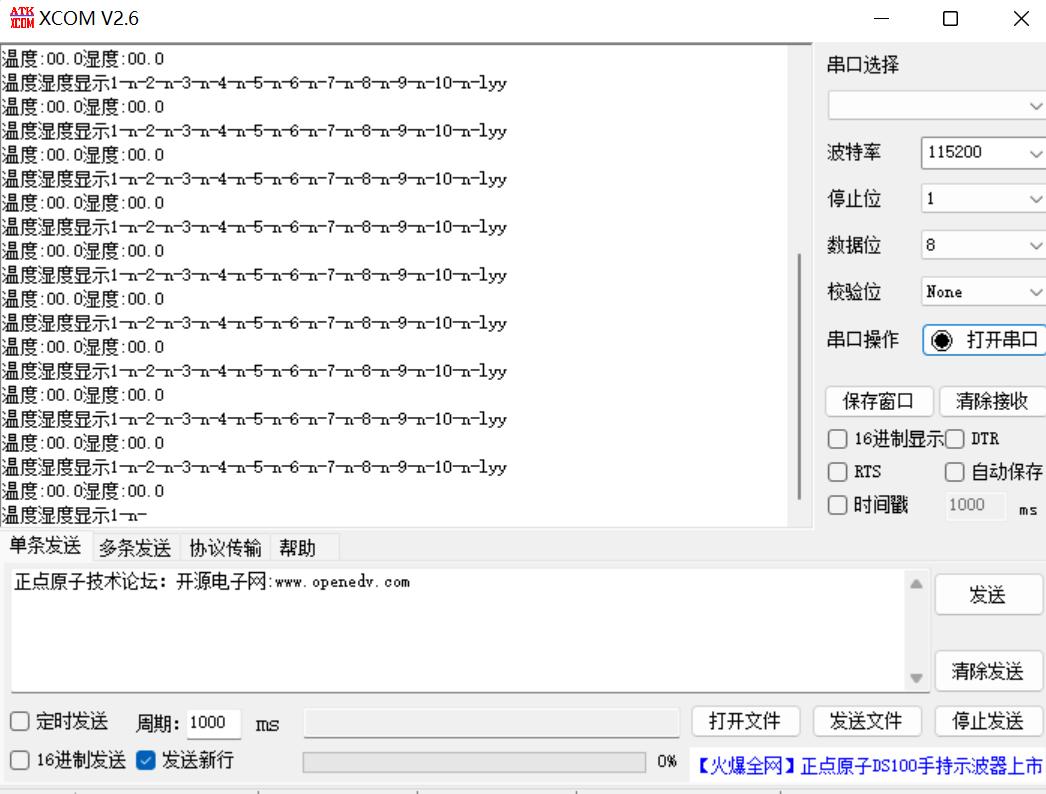
编译,烧录,串口调试
三,OLED屏显和汉字点阵编码原理
1,SPI的定义
SPI(Serial Peripheral Interface)就是串行外围设备接口。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚。SPI 是一个环形总线结构,由 ss(cs)、sck、sdi、sdo 构成,时序主要是在 sck 的控制下,两个双向移位寄存器进行数据交换。
上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,sdo 上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,sdi 上的电平将被接收到主设备的寄存器中。
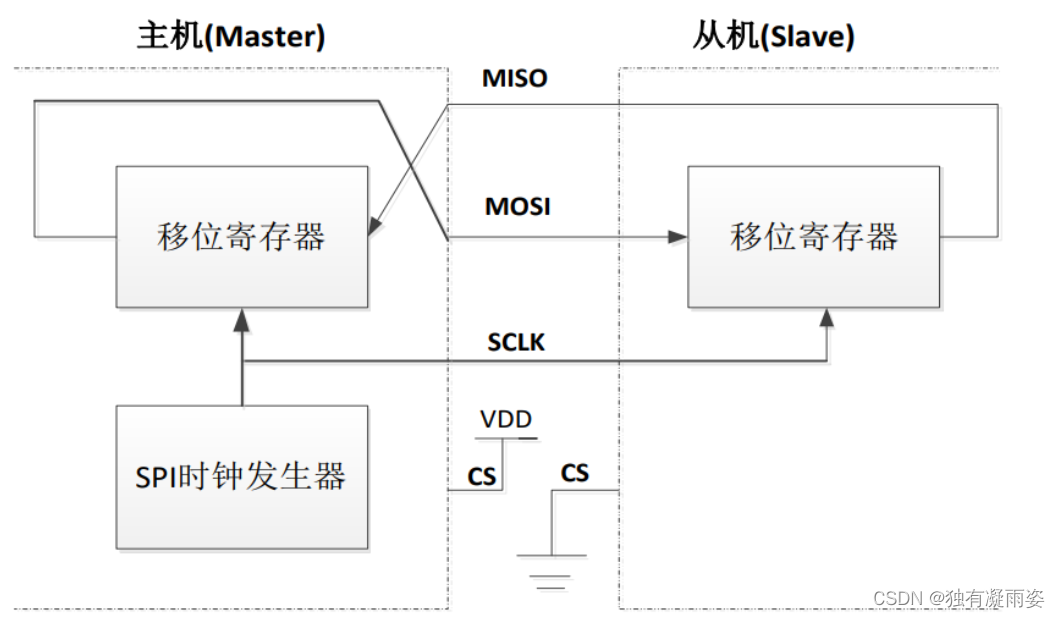
2,SPI的连接方式
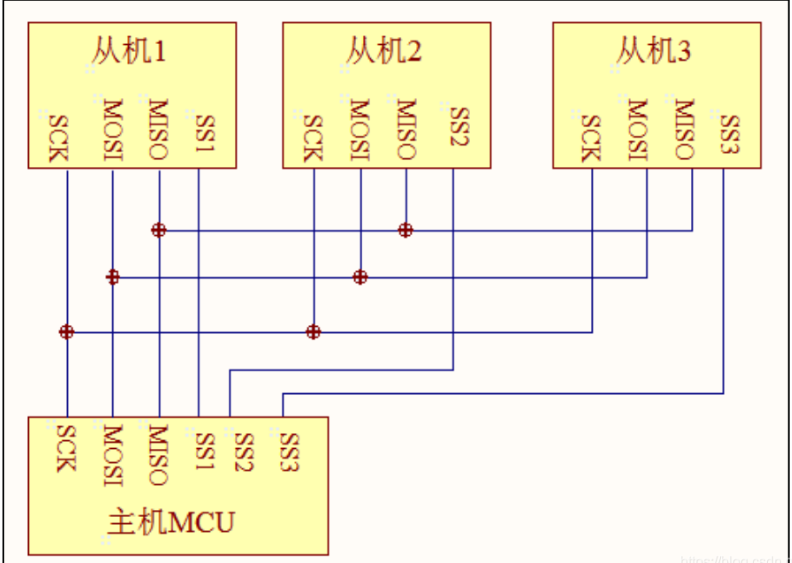
SS( Slave Select):从设备选择信号线,常称为片选信号线。
SCK (Serial Clock):时钟信号线,用于通讯数据同步。
MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。
MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。
3,SPI的通讯过程
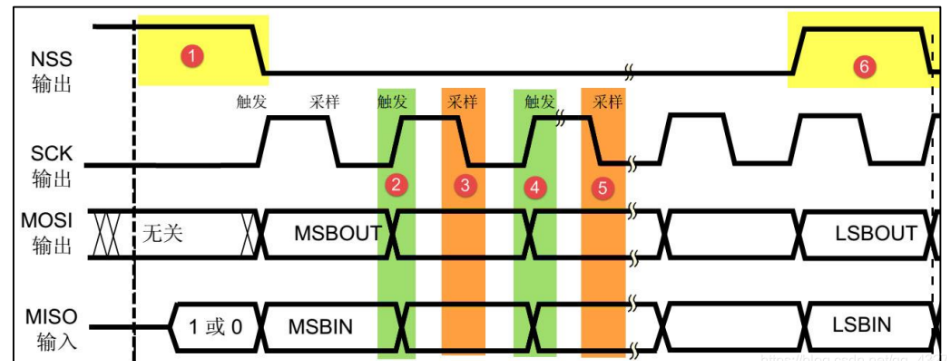
MOSI 与 MISO 的信号只在 NSS 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
4,OLED介绍
OLED即有机发光二极管(Organic Light-Emitting Diode),又称为有机电激光显示(Organic Electroluminesence Display, OELD)。OLED 由于同时具备自发光,不需背光源、对比度高、厚度薄、视角广、反应速度快、可用于挠曲性面板、使用温度范围广、构造及制程较简单等优异之特性,被认为是下一代的平面显示器新兴应用技术。
LCD 都需要背光,而 OLED 不需要,因为它是自发光的。这样同样的显示,OLED 效果要来得好一些。以目前的技术,OLED 的尺寸还难以大型化,但是分辨率确可以做到很高。
我们使用的是 ALINETEK 的 OLED 显示模块,该模块有以下特点:
1)模块有单色和双色两种可选,单色为纯蓝色,而双色则为黄蓝双色。
2)尺寸小,显示尺寸为 0.96 寸,而模块的尺寸仅为 27mmx26mm 大小。
3)高分辨率,该模块的分辨率为128x64。
4)多种接口方式,该模块提供了总共 5 种接口包括:6800、8080 两种并行接口方式、3线或 4 线的穿行 SPI 接口方式、IIC 接口方式(只需要 2 根线就可以控制 OLED 了)。
5)不需要高压,直接接 3.3V 就可以工作了。
注意该模块不和 5.0V 接口兼容,所以在使用的时候一定要小心,勿直接接到 5V 的系统上去,否则可能烧坏模块。
该模块采用 8*2 的 2.54 排针与外部连接,总共有 16 个管脚,在 16 条线中,我们只用了 15条,有一个是悬空的。15 条线中,电源和地线占了 2 条,还剩下 13 条信号线。在不同模式下,我们需要的信号线数量是不同的,在 8080 模式下,需要全部 13 条,而在 IIC 模式下,仅需要2条线就够了!这其中有一条是共同的,那就是复位线 RST(RES),RST 上的低电平,将导致 OLED 复位,在每次初始化之前,都应该复位一下 OLED 模块。
四,使用OLED显示屏显示数据
1,姓名学号显示
1), 下载资料包
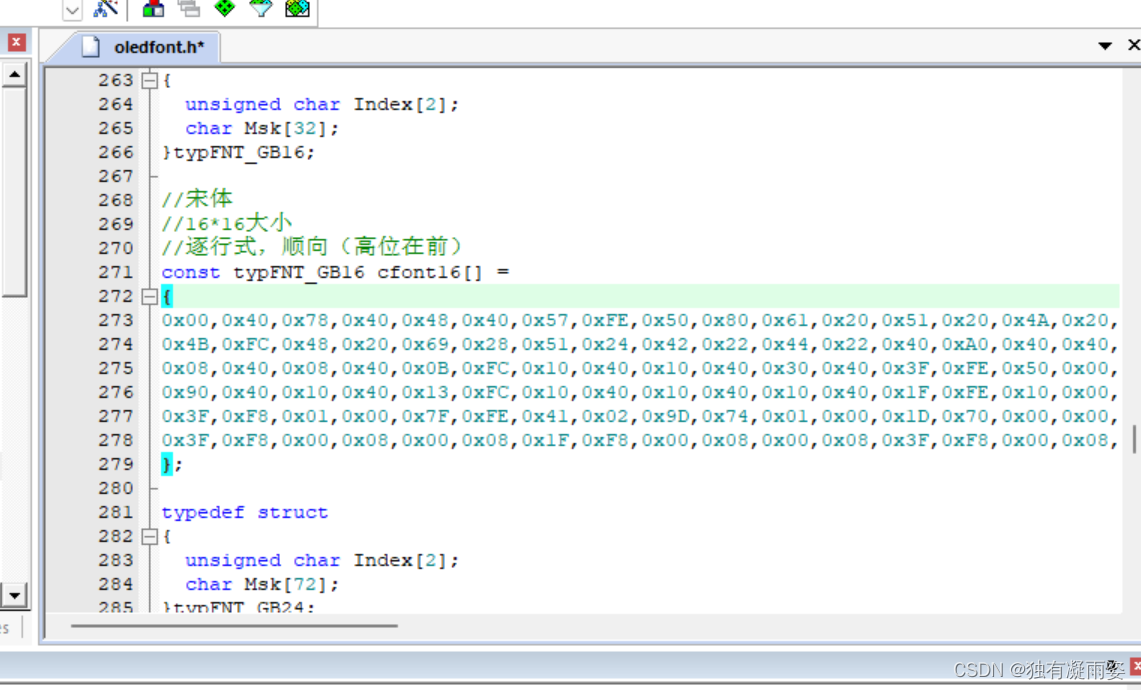
2),添加字模
字模提取
利用下面所给软件生成字模
http://www.lcdwiki.com/zh/0.96inch_SPI_OLED_Module
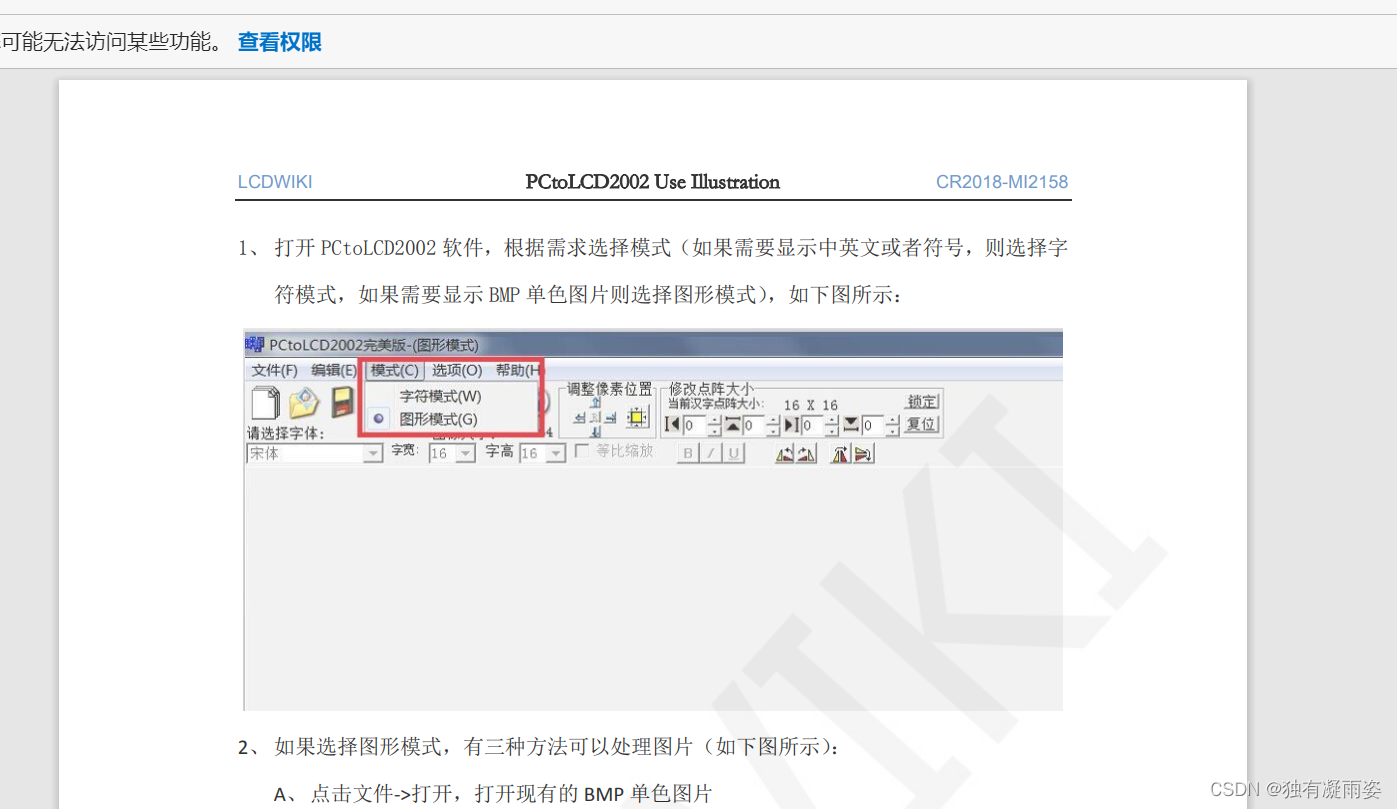
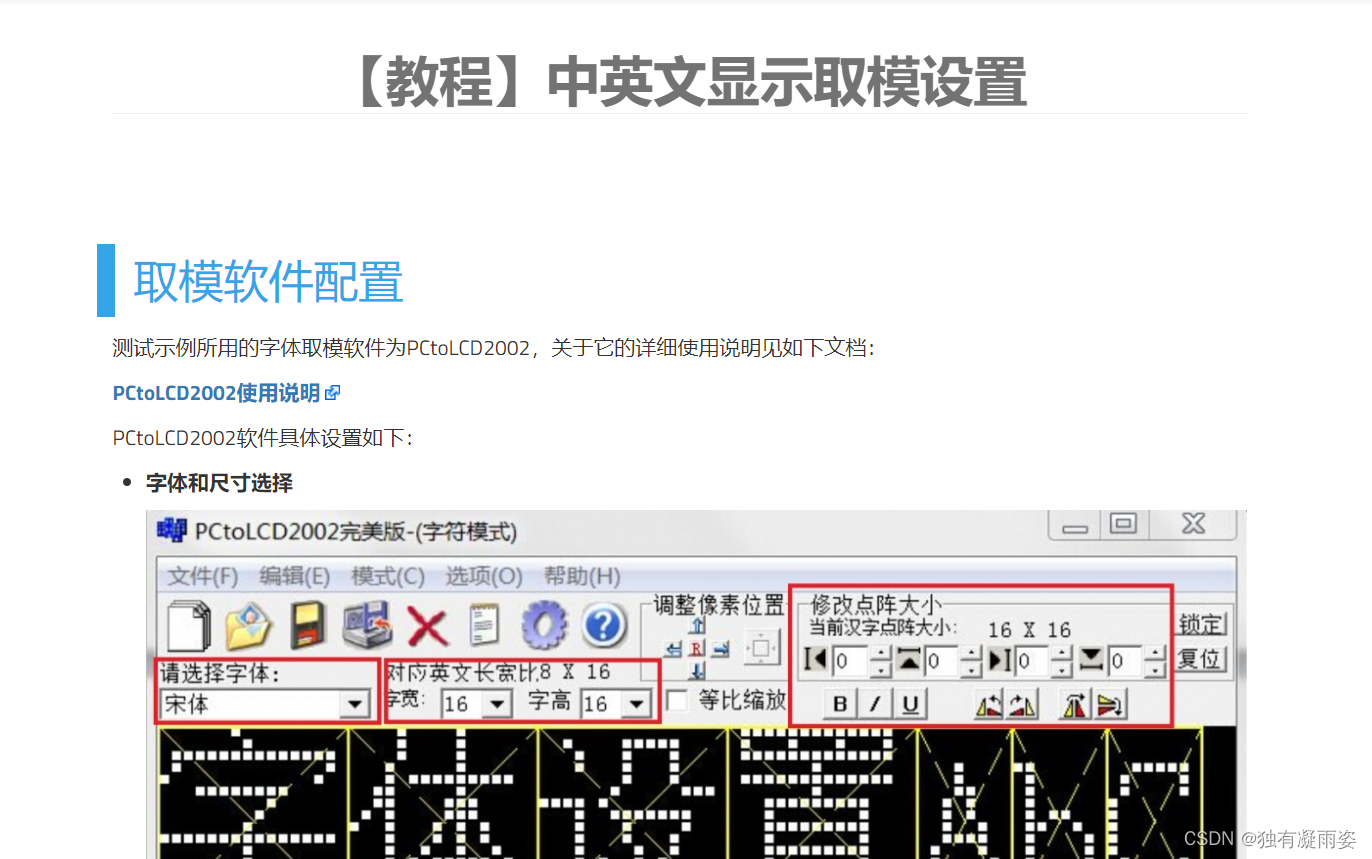

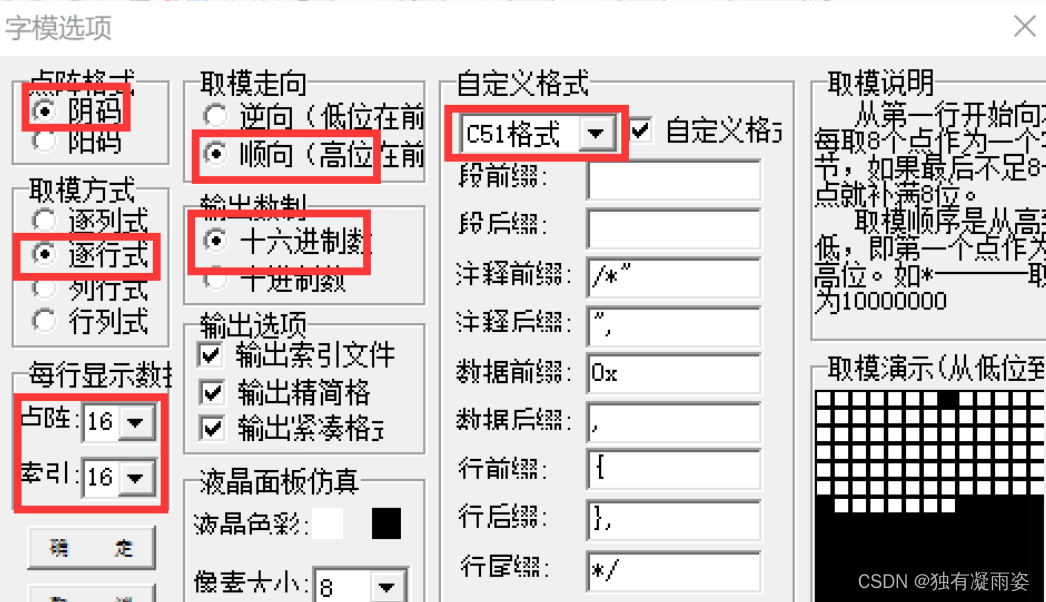
点击选项修改参数
按照下图修改
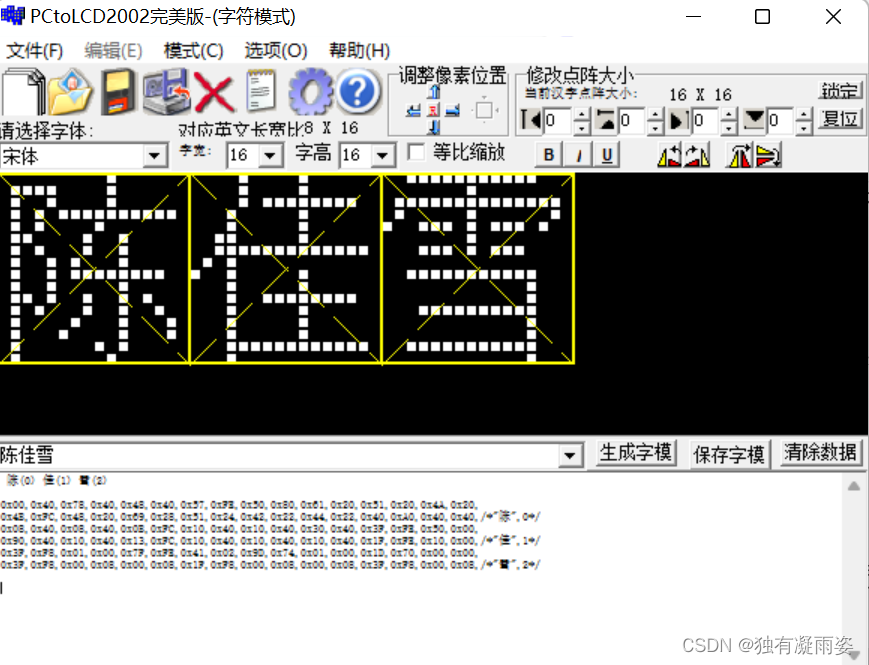
存储代码
陈(0) 佳(1) 雪(2)
0x00,0x40,0x78,0x40,0x48,0x40,0x57,0xFE,0x50,0x80,0x61,0x20,0x51,0x20,0x4A,0x20,
0x4B,0xFC,0x48,0x20,0x69,0x28,0x51,0x24,0x42,0x22,0x44,0x22,0x40,0xA0,0x40,0x40,/*"陈",0*/
0x08,0x40,0x08,0x40,0x0B,0xFC,0x10,0x40,0x10,0x40,0x30,0x40,0x3F,0xFE,0x50,0x00,
0x90,0x40,0x10,0x40,0x13,0xFC,0x10,0x40,0x10,0x40,0x10,0x40,0x1F,0xFE,0x10,0x00,/*"佳",1*/
0x3F,0xF8,0x01,0x00,0x7F,0xFE,0x41,0x02,0x9D,0x74,0x01,0x00,0x1D,0x70,0x00,0x00,
0x3F,0xF8,0x00,0x08,0x00,0x08,0x1F,0xF8,0x00,0x08,0x00,0x08,0x3F,0xF8,0x00,0x08,/*"雪",2*/
打开上面下载的工程文件“0.96inch_OLED_Demo_STM32F103RCT6_Software_4-wire_SPI\PROJECT\OLED.uvprojx”
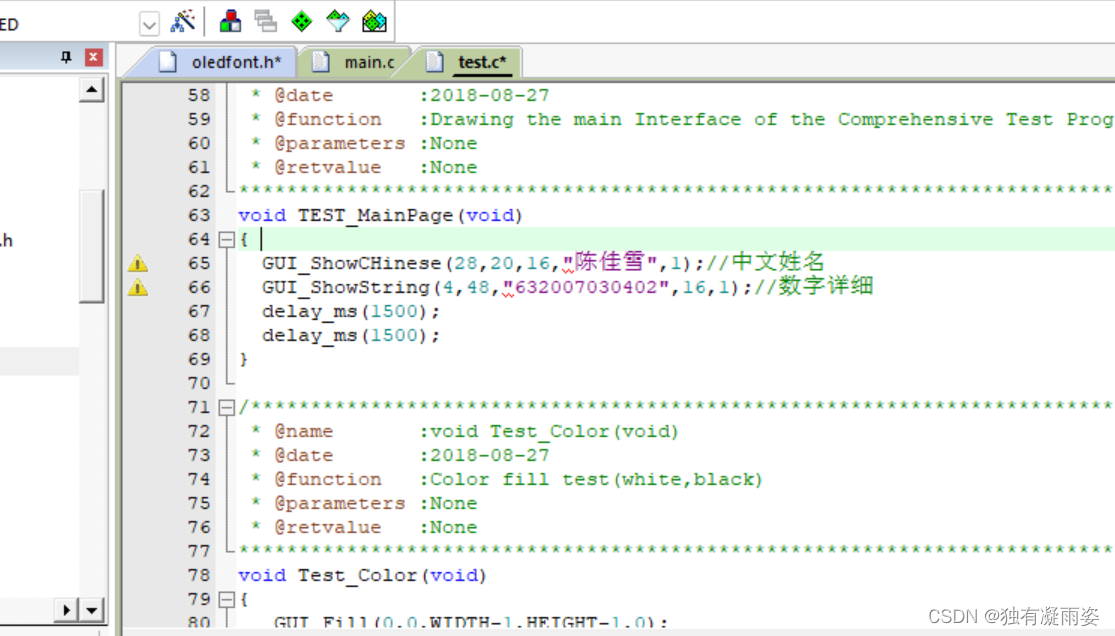
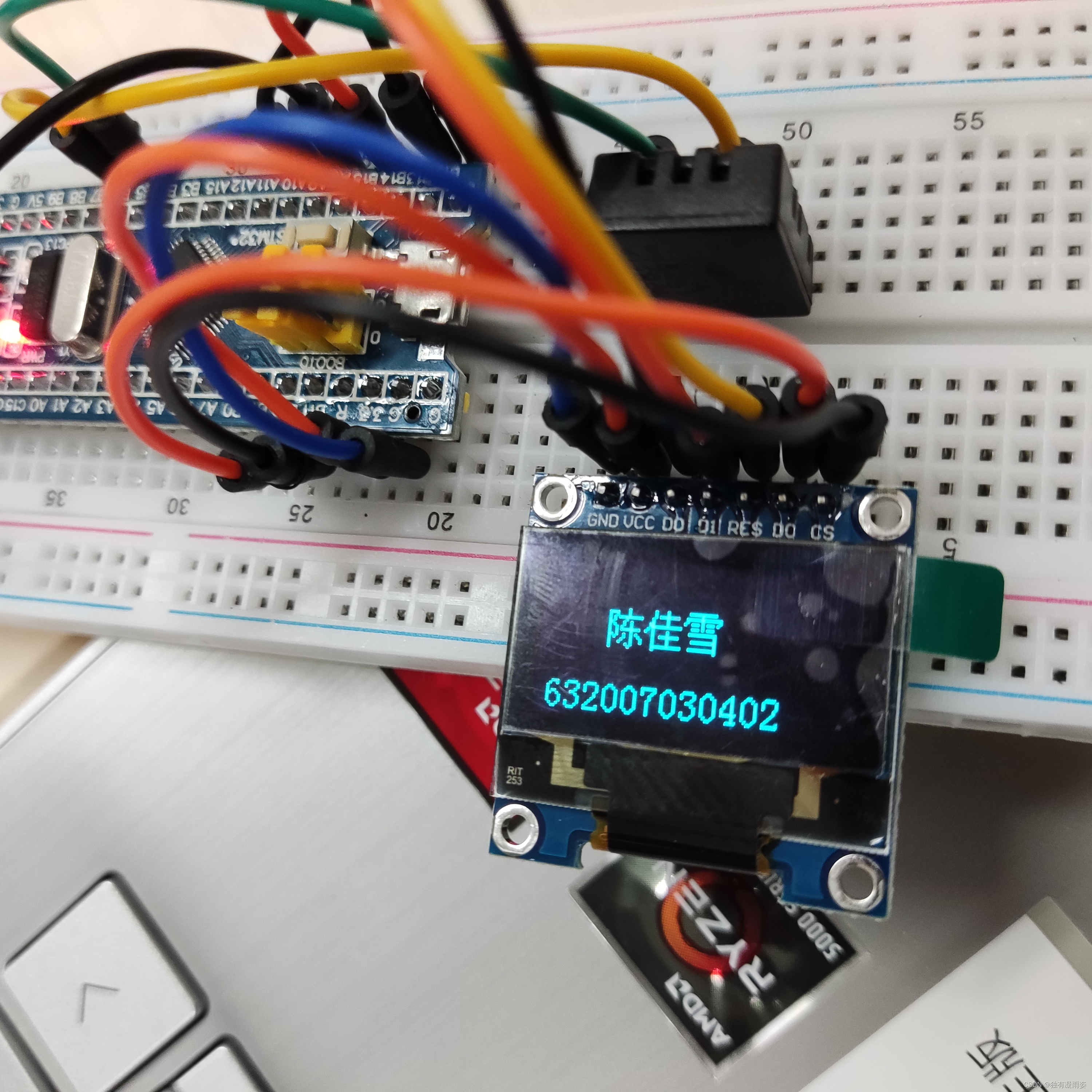
实现显示代码
void TEST_MainPage(void)
{
GUI_ShowCHinese(28,20,16,"陈佳雪",1);//中文姓名
GUI_ShowString(4,48,"632007030402",16,1);//数字详细
delay_ms(1500);
delay_ms(1500);
}
函数说明:
① GUI_ShowString() 函数各参数分别对应: X 坐标、Y
坐标、字符串(ASCLL码中的)、bit(表示字符显示格式,这里我用的 16 ,和汉字一样高)、显示样式(1:白字黑底;0:黑字白底)。 ②
GUI_ShowChinese() 函数各参数分别对应: X 坐标、Y 坐标、汉字点阵大小(这里使用的是 16×16
的,参数应该是16)、要显示的汉字、显示样式(1:白字黑底;0:黑字白底)。
main函数
int main(void)
{
delay_init(); //延时函数初始化
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏(全黑)
while(1)
{
TEST_MainPage(); //界面显示
}
}
编译烧录
2,显示AHT20的温度和湿度
1),添加字模
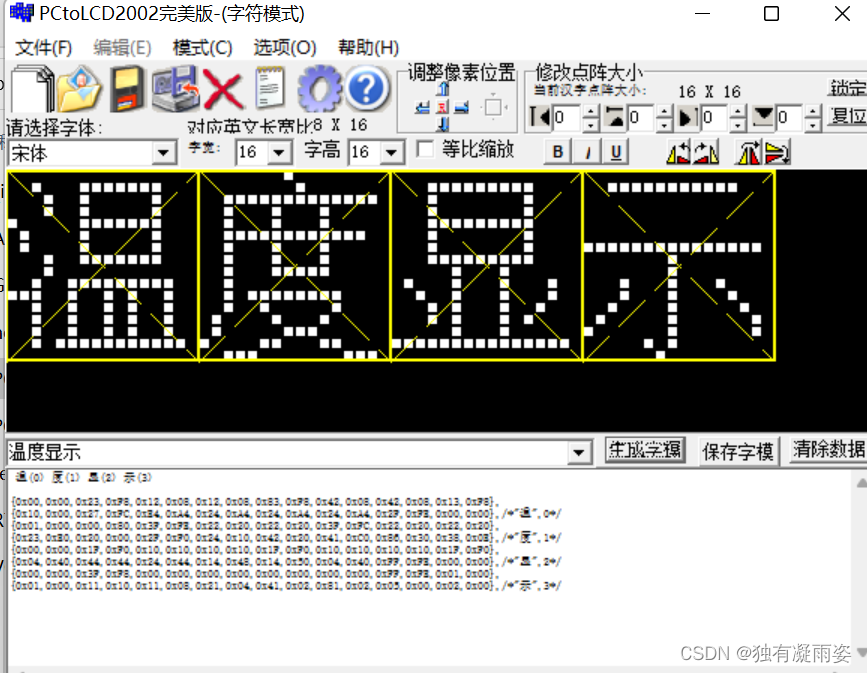
"温",0x00,0x00,0x23,0xF8,0x12,0x08,0x12,0x08,0x83,0xF8,0x42,0x08,0x42,0x08,0x13,0xF8,
0x10,0x00,0x27,0xFC,0xE4,0xA4,0x24,0xA4,0x24,0xA4,0x24,0xA4,0x2F,0xFE,0x00,0x00,/*"温",0*/
"度",0x01,0x00,0x00,0x80,0x3F,0xFE,0x22,0x20,0x22,0x20,0x3F,0xFC,0x22,0x20,0x22,0x20,
0x23,0xE0,0x20,0x00,0x2F,0xF0,0x24,0x10,0x42,0x20,0x41,0xC0,0x86,0x30,0x38,0x0E,/*"度",0*/
"湿",0x00,0x00,0x27,0xF8,0x14,0x08,0x14,0x08,0x87,0xF8,0x44,0x08,0x44,0x08,0x17,0xF8,
0x11,0x20,0x21,0x20,0xE9,0x24,0x25,0x28,0x23,0x30,0x21,0x20,0x2F,0xFE,0x00,0x00,/*"湿",0*/
"显",0x00,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x1F,0xF0,0x10,0x10,0x10,0x10,0x1F,0xF0,
0x04,0x40,0x44,0x44,0x24,0x44,0x14,0x48,0x14,0x50,0x04,0x40,0xFF,0xFE,0x00,0x00,/*"显",0*/
"示",0x00,0x00,0x3F,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFE,0x01,0x00,
0x01,0x00,0x11,0x10,0x11,0x08,0x21,0x04,0x41,0x02,0x81,0x02,0x05,0x00,0x02,0x00,/*"示",0*/
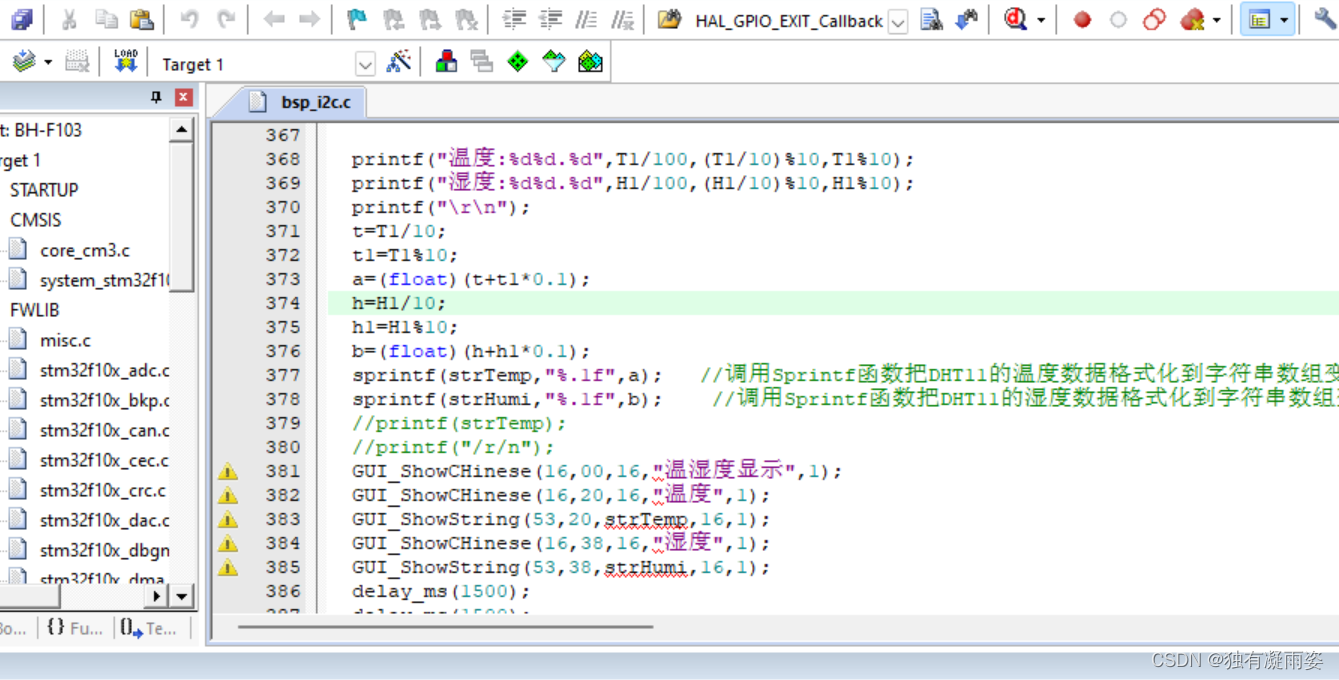
2),代码
温湿度显示
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("lyy");
}
/*通过串口显示采集得到的温湿度
printf("\r\n");
printf("温度:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("湿度:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");*/
t=T1/10;
t1=T1%10;
a=(float)(t+t1*0.1);
h=H1/10;
h1=H1%10;
b=(float)(h+h1*0.1);
sprintf(strTemp,"%.1f",a); //调用Sprintf函数把DHT11的温度数据格式化到字符串数组变量strTemp中
sprintf(strHumi,"%.1f",b); //调用Sprintf函数把DHT11的湿度数据格式化到字符串数组变量strHumi中
GUI_ShowCHinese(16,00,16,"温湿度显示",1);
GUI_ShowCHinese(16,20,16,"温度",1);
GUI_ShowString(53,20,strTemp,16,1);
GUI_ShowCHinese(16,38,16,"湿度",1);
GUI_ShowString(53,38,strHumi,16,1);
delay_ms(1500);
delay_ms(1500);
}
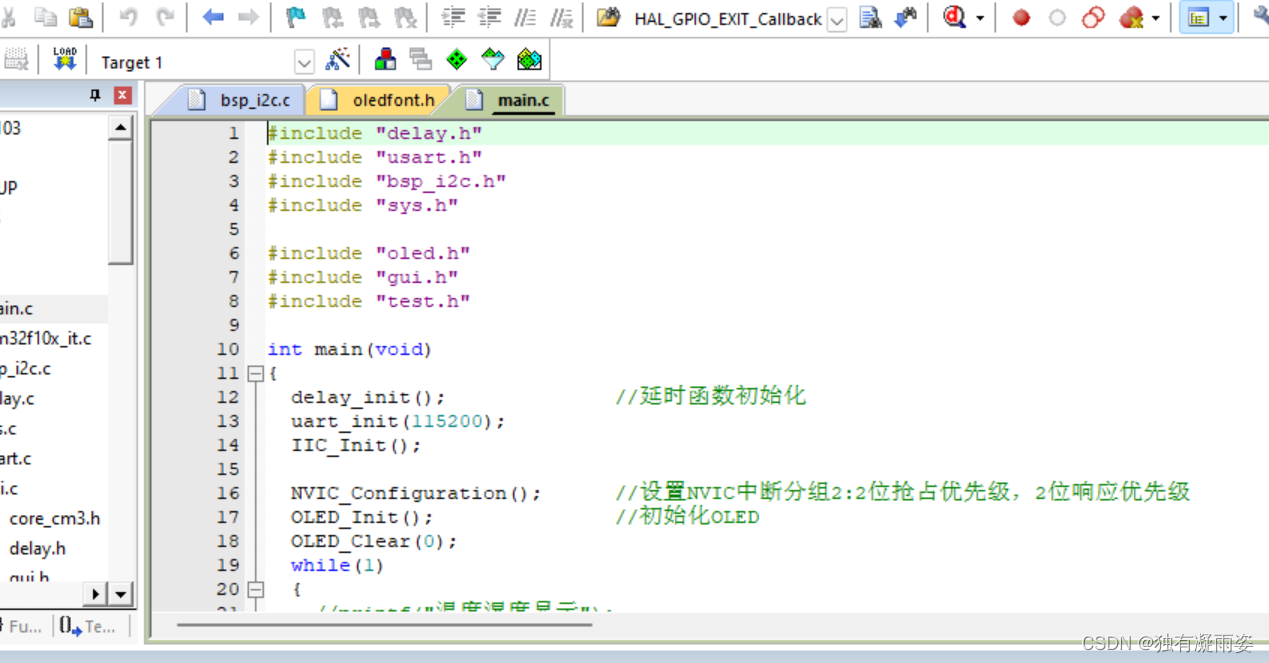
主函数main.c文件
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"
#include "sys.h"
#include "oled.h"
#include "gui.h"
#include "test.h"
int main(void)
{
delay_init(); //延时函数初始化
uart_init(115200);
IIC_Init();
NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
OLED_Init(); //初始化OLED
OLED_Clear(0);
while(1)
{
//printf("温度湿度显示");
read_AHT20_once();
OLED_Clear(0);
delay_ms(1500);
}
}
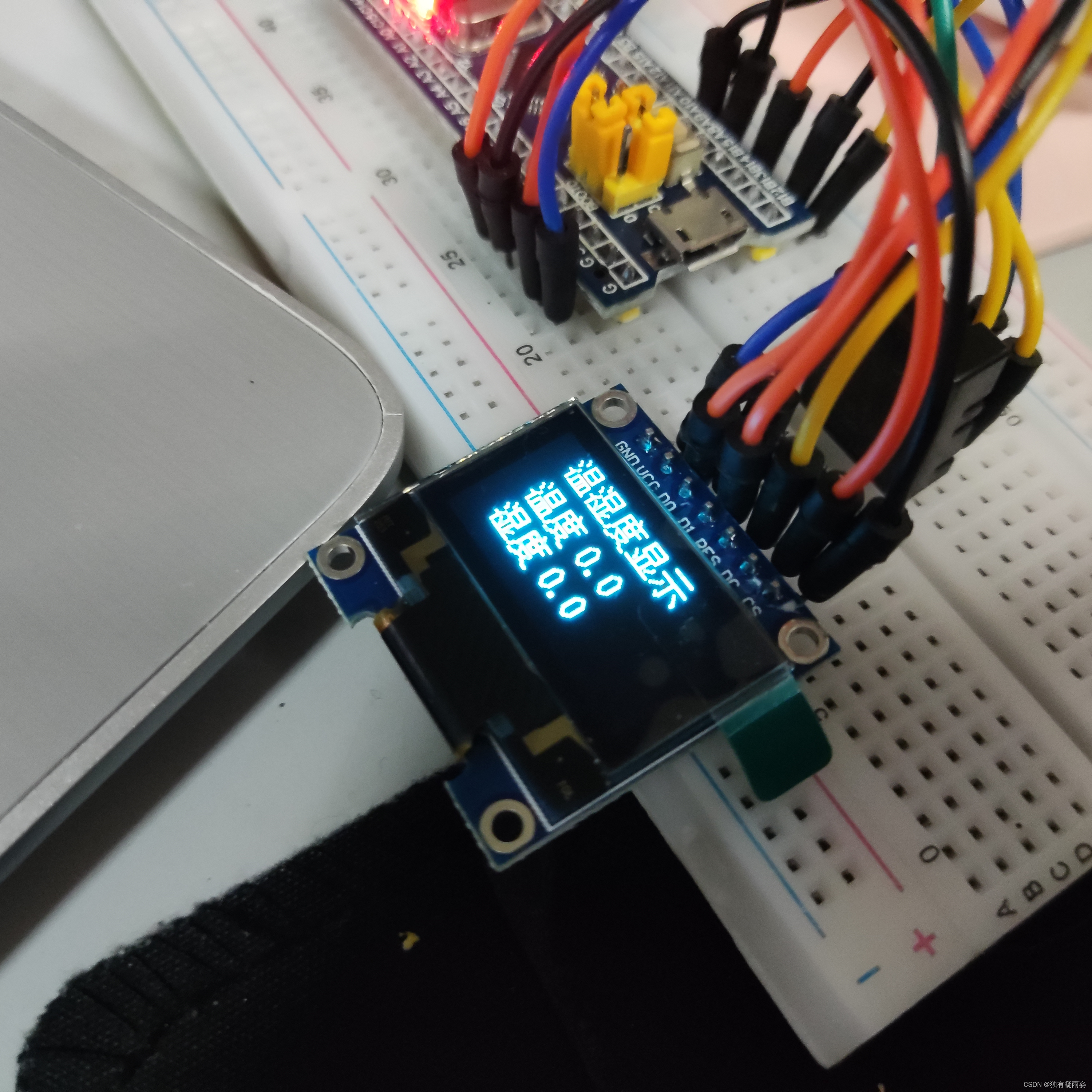
3),烧录显示
3,上下或左右的滑动显示长字符
1)、滚屏设置
水平左右移动
OLED_WR_Byte(0x2E,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x26,OLED_CMD); //水平向左或者右滚动 26/27
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x07,OLED_CMD); //终止页 7
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0xFF,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动
垂直和水平滚动
OLED_WR_Byte(0x2e,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x29,OLED_CMD); //水平垂直和水平滚动左右 29/2a
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x07,OLED_CMD); //终止页 1
OLED_WR_Byte(0x01,OLED_CMD); //垂直滚动偏移量
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动
2)、代码
字模
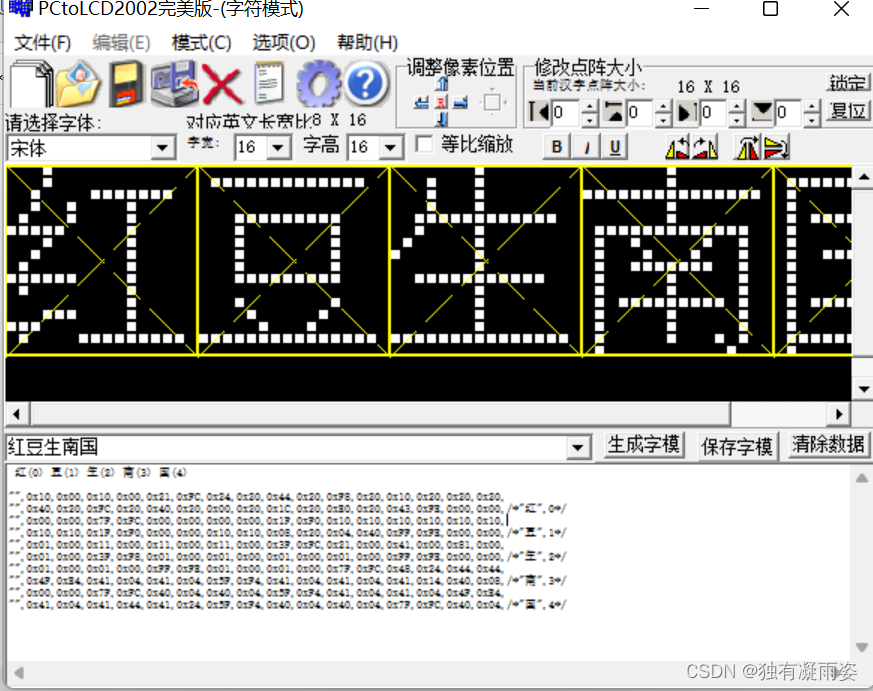
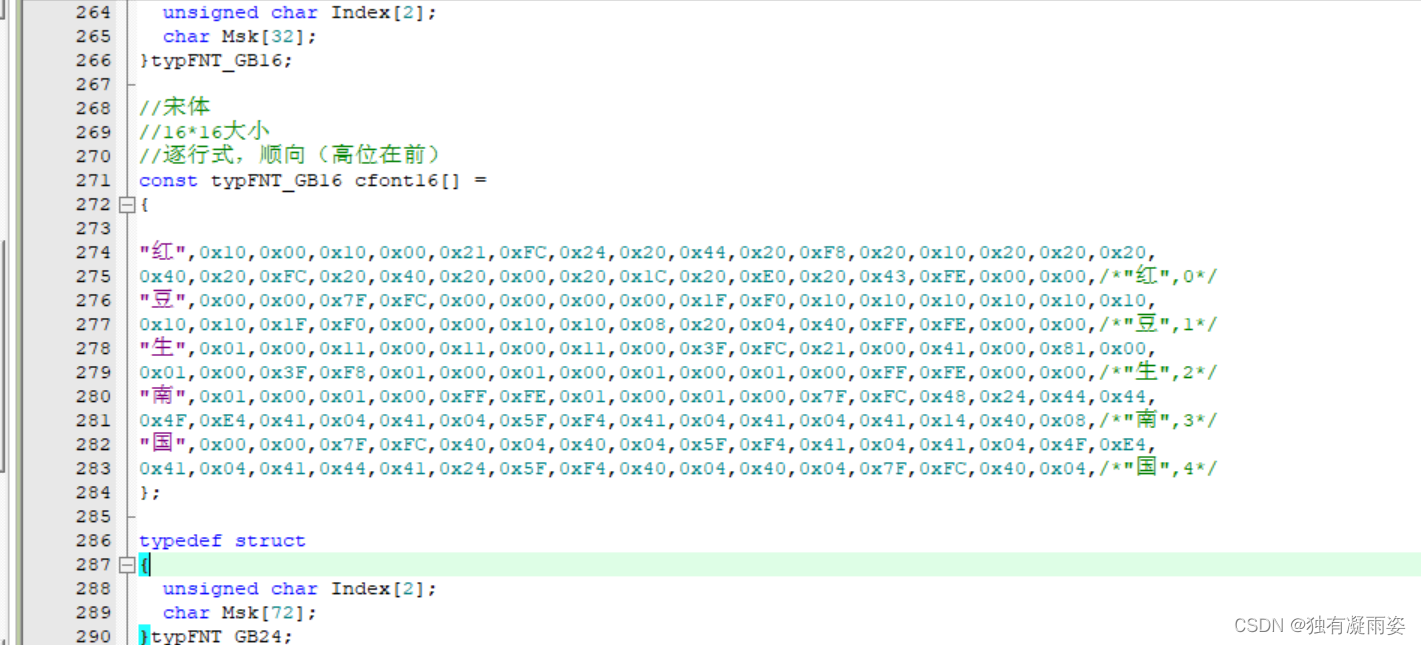
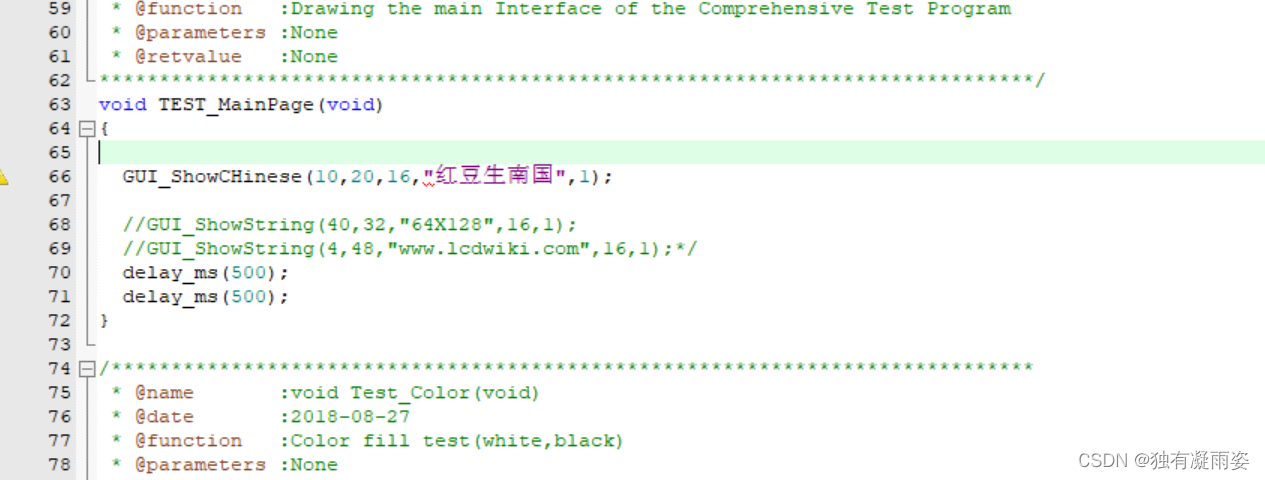
OLED显示函数
void TEST_MainPage(void)
{
GUI_ShowCHinese(10,20,16,"红豆生南国",1);
delay_ms(1500);
delay_ms(1500);
}
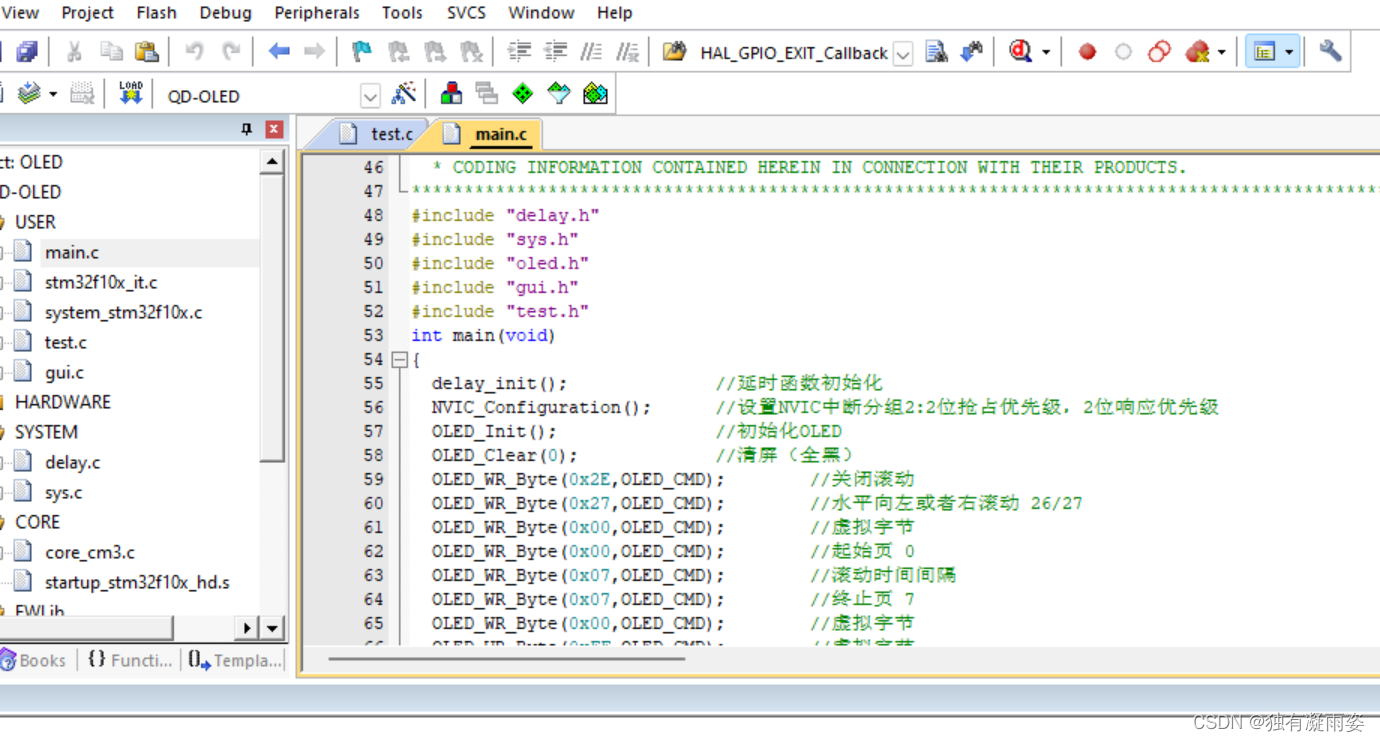
主函数main.c文件
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "gui.h"
#include "test.h"
int main(void)
{
delay_init(); //延时函数初始化
NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏(全黑)
OLED_WR_Byte(0x2E,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x27,OLED_CMD); //水平向左或者右滚动 26/27
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x07,OLED_CMD); //终止页 7
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0xFF,OLED_CMD); //虚拟字节
TEST_MainPage();
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动
}
3),烧录结果

第八周
五, 总结
通过本次实验,我学习了解到了I2C总线协议,以及AHT20温湿度传感器的使用。学习使用STM32F103完成基于I2C协议的AHT20温湿度传感器的数据采集,并将采集的温度-湿度值通过串口输出。过程遇到了很多困难,也都通过查询资料深入学习。

















 283
283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









