






ROS支持在Linux系统上安装部署,因为ROS与Ubuntu兼容性最好,使用它的首选开发平台是Ubuntu,并且Ubuntu版本和ROS版本要一致。
一、安装Ubuntu
1、Ubuntu镜像文件下载
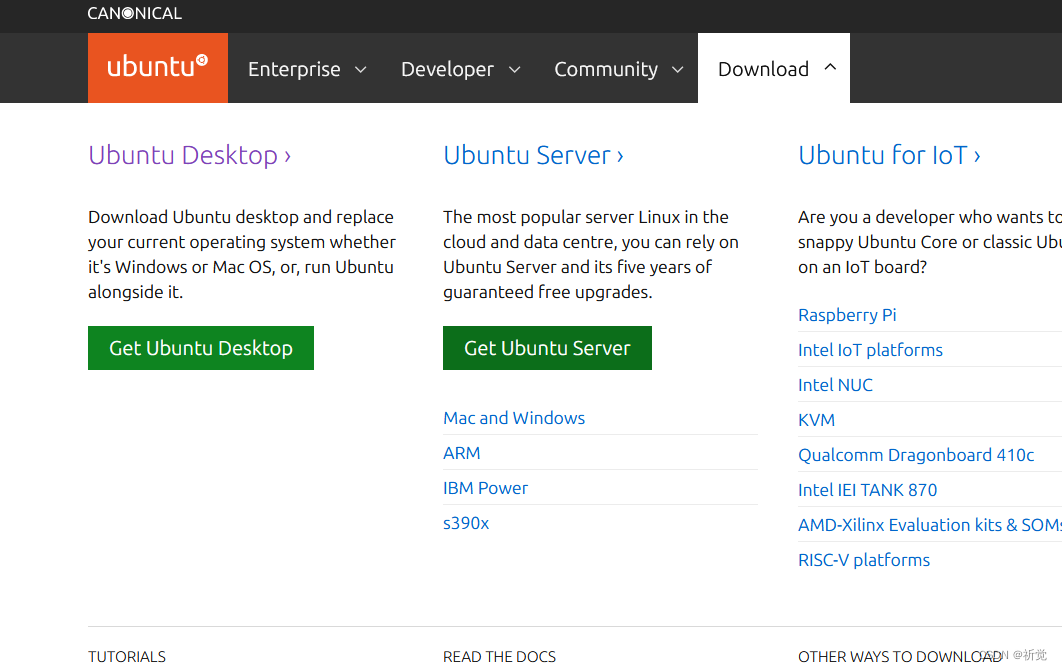
进入Ubuntu官网地址:https://ubuntu.com
点击download,然后点击Ubuntu desktop
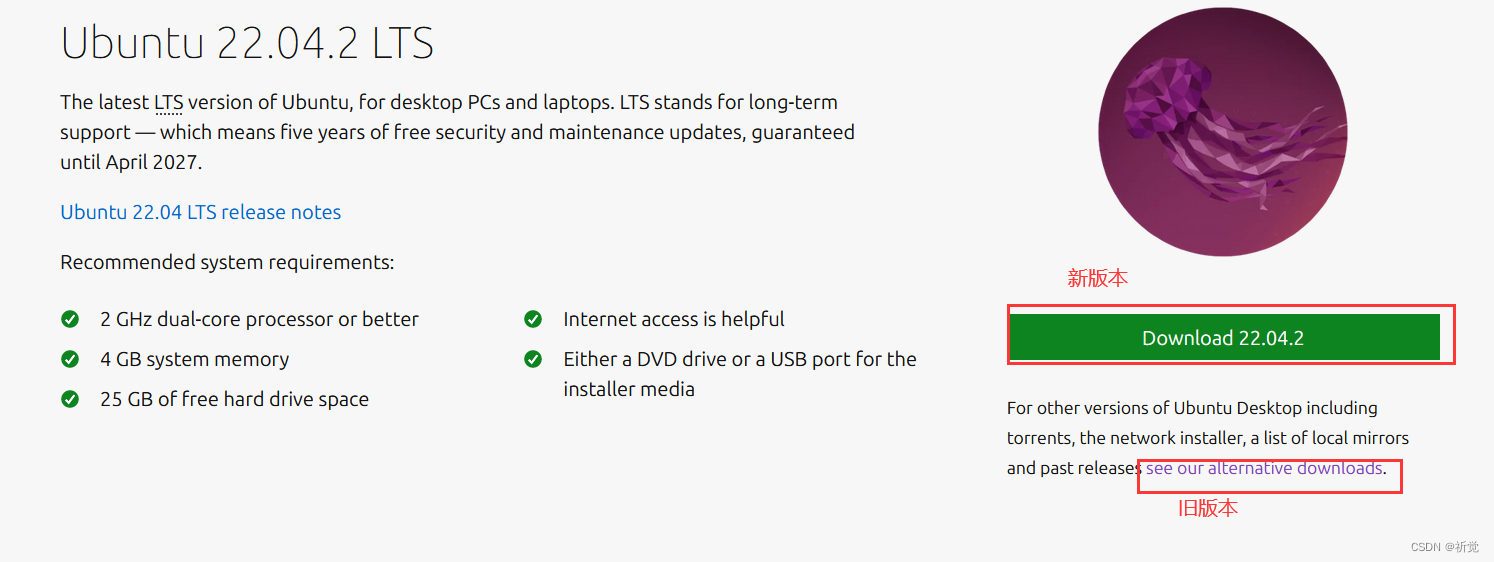
进入下一个界面,往下滑,可以选择最新版本或者旧版本进行下载
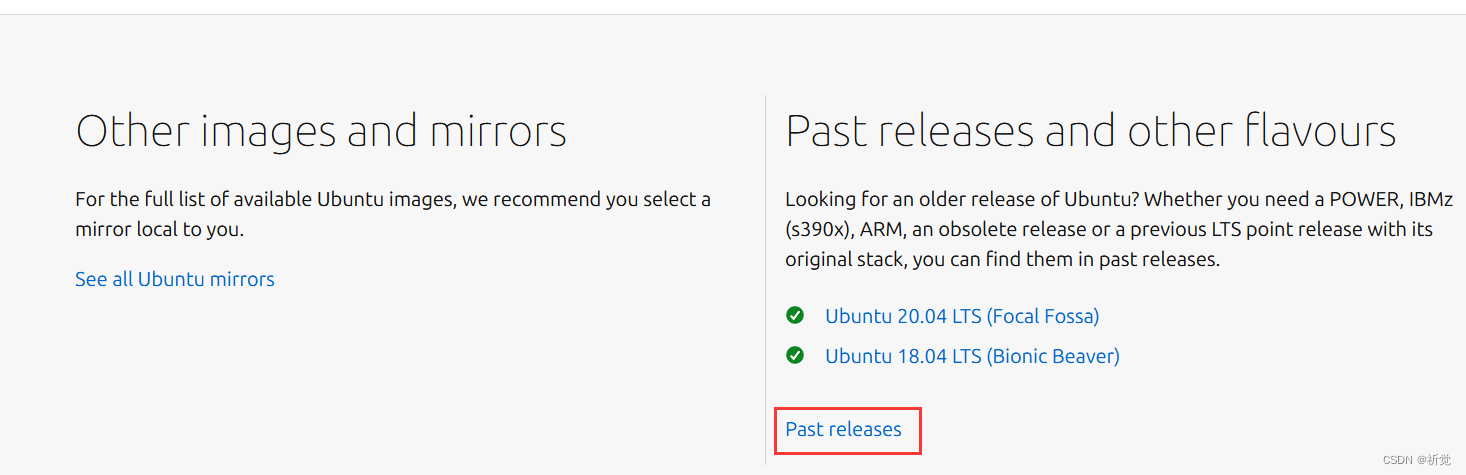
若选择旧版本,点击之后进入下一界面,往下滑找到 past release,双击past release
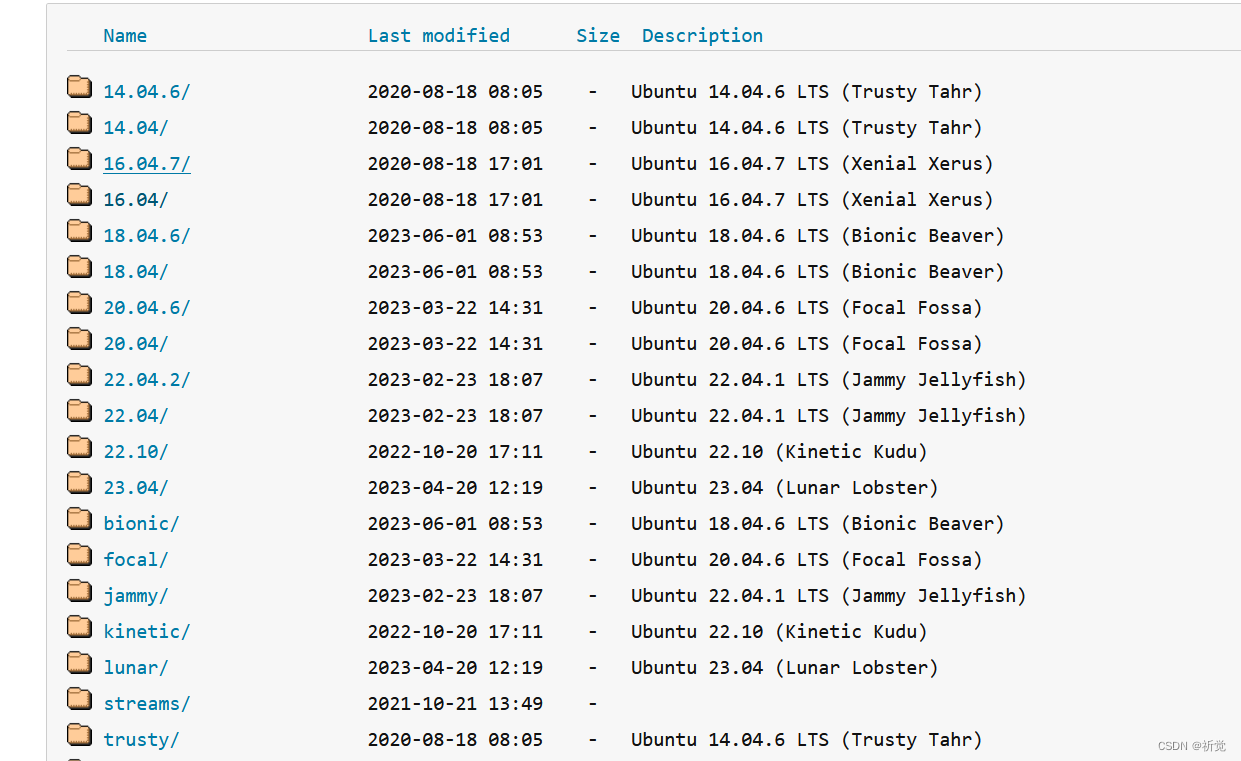
选择自己想要的版本进行下载
下载完成

2、创建虚拟机
新建虚拟机 ,点击下一步
点击下一步
选择稍后安装驱动器 ,点击下一步
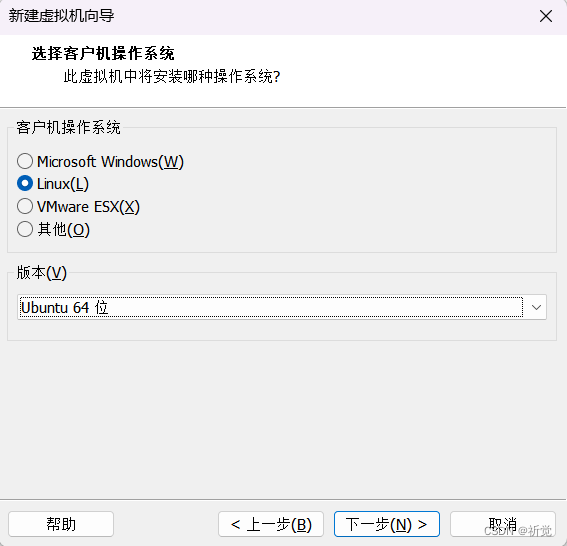
选择Linux,Ubuntu 64位,点击下一步
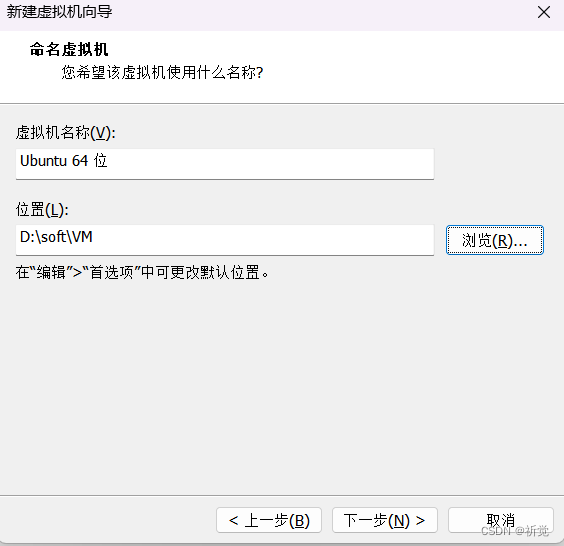
命名虚拟机(可选择默认,也可自行修改),选择安装位置(可选择默认,也可自行修改,建议不要安装在C盘),点击下一步
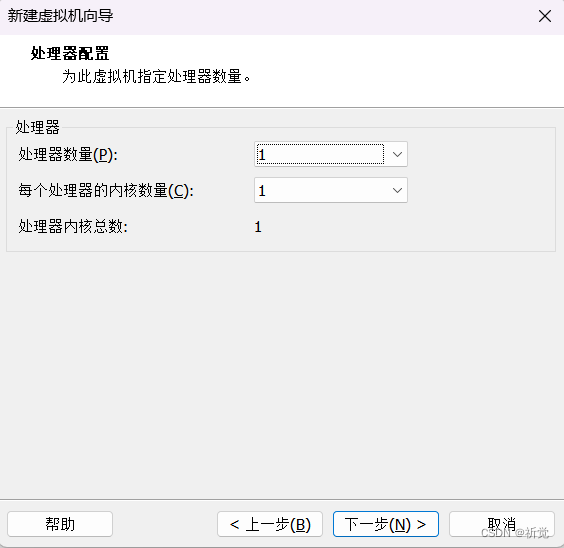
按照默认就行(可根据需要自行修改),点击下一步
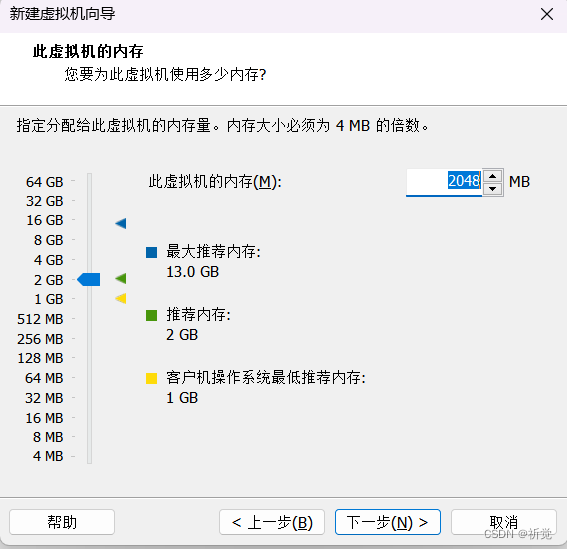
按照默认虚拟机内存(可根据需要自行修改),点击下一步
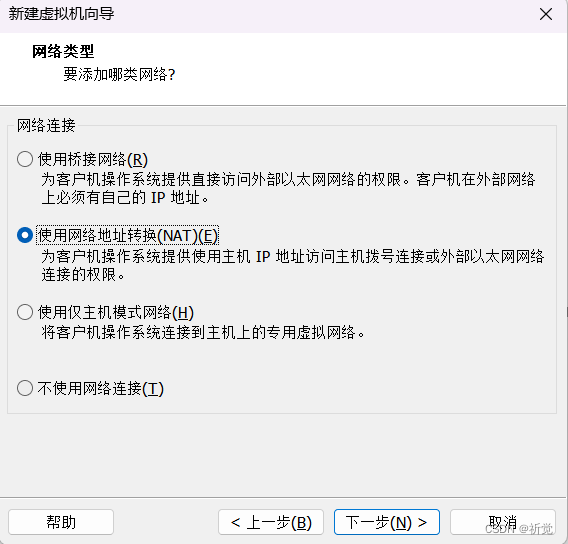
默认选择“使用网络地址转换(NAT)”,点击下一步
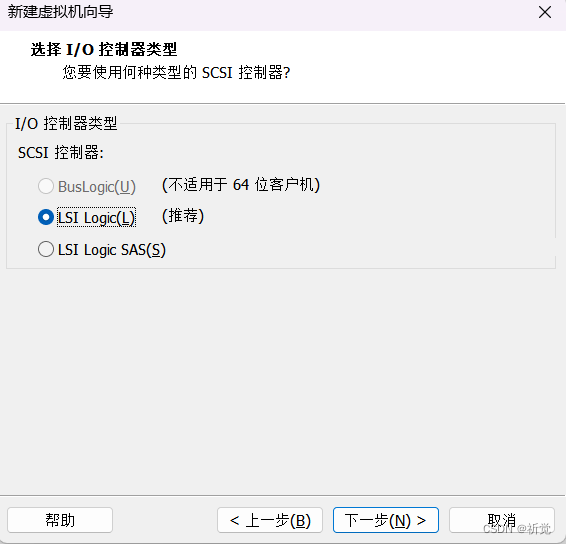
选择LSI Logic,点击下一步
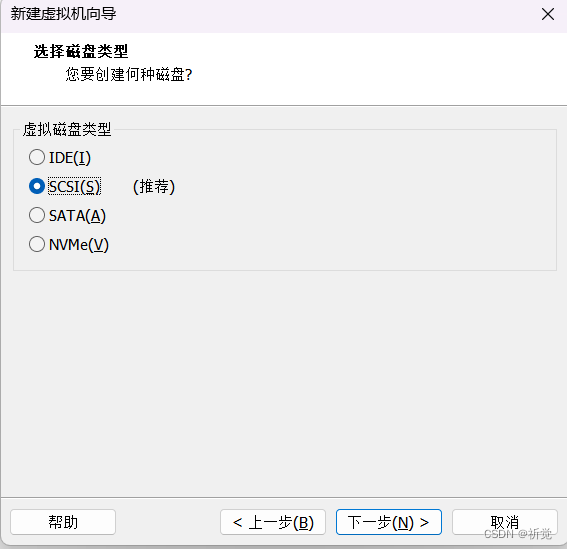
选择SCSI,点击下一步
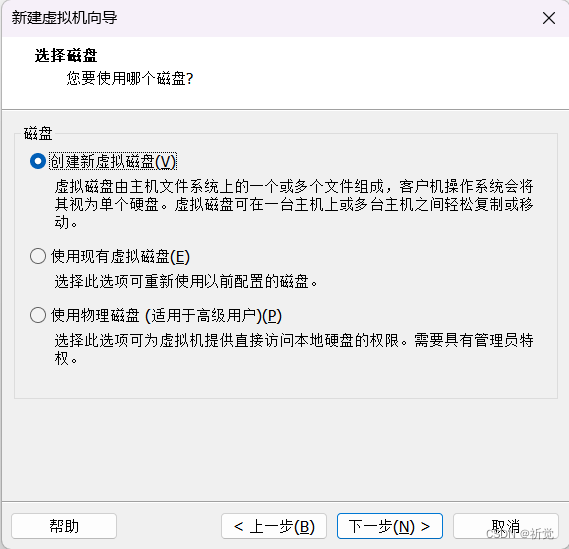
选择创建新虚拟磁盘,点击下一步
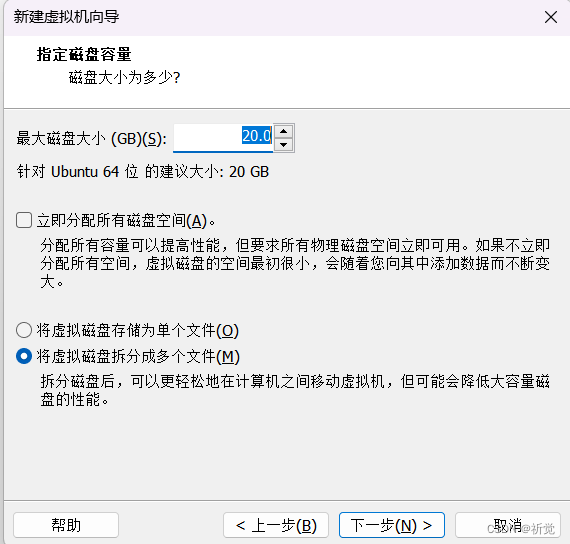
修改磁盘大小(可选择默认或更大的),选择将磁盘拆分为多个文件,点击下一步
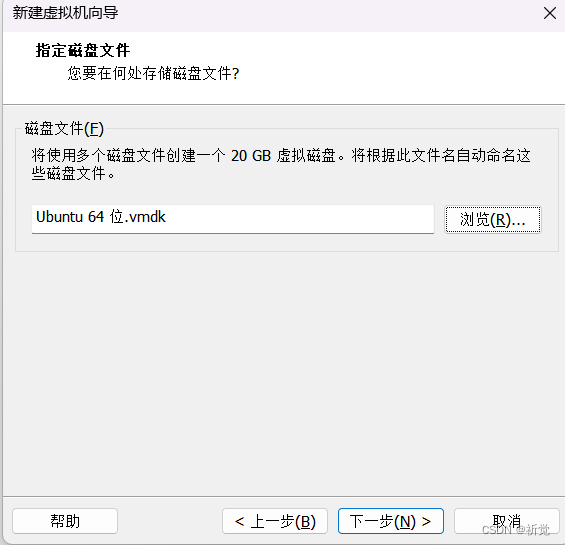
选择磁盘文件存储位置,选择之前的存放路径下,点击下一步
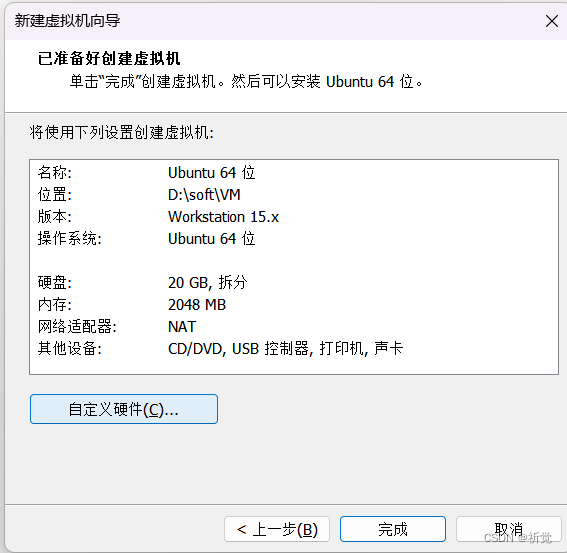
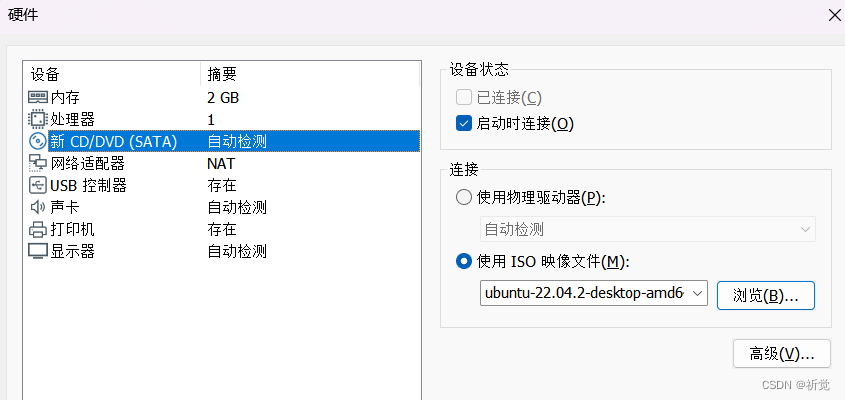
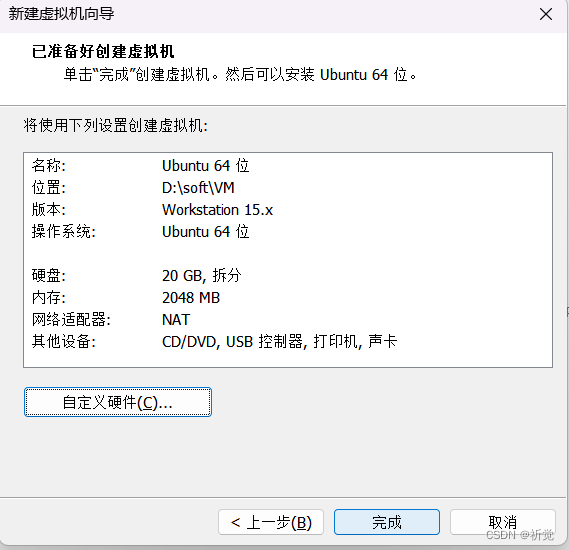
选择自定义硬件
选择使用ISO映像文件,打开刚刚下载的镜像文件路径,点击关闭
点击完成
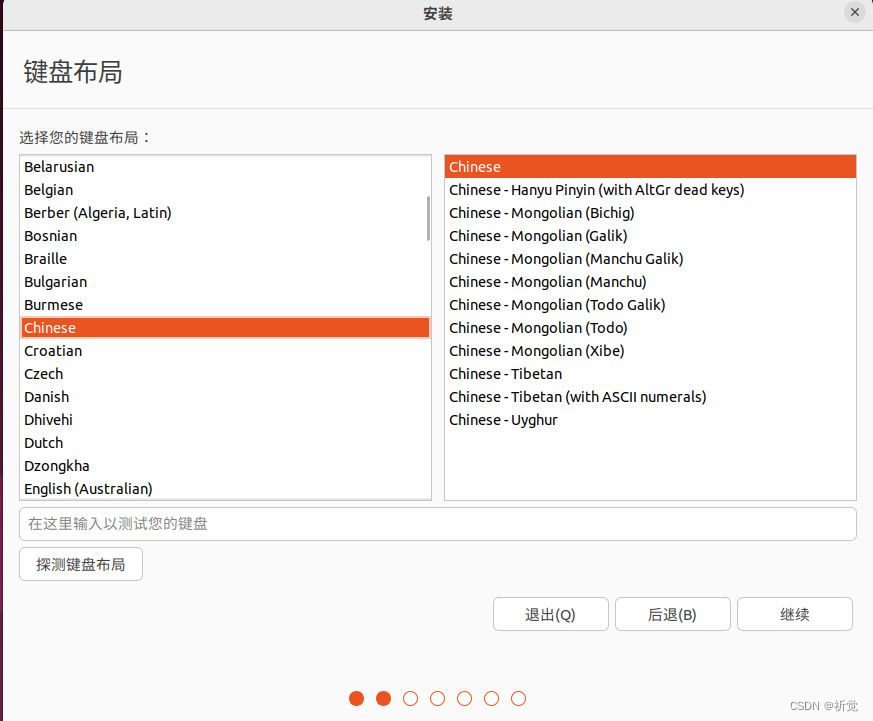
打开虚拟机 ,等待一会儿会出现如下界面,最左侧语言栏往下滑选择简体中文,然后点击安装Ubuntu

点击继续
去掉安装时更新,点击继续

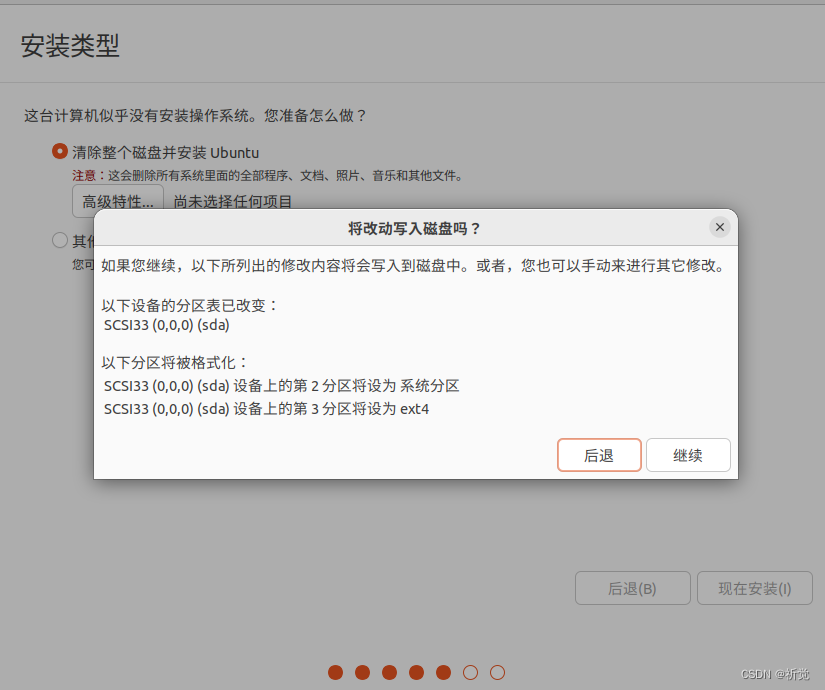
点击现在安装
点击继续,将改动写入磁盘
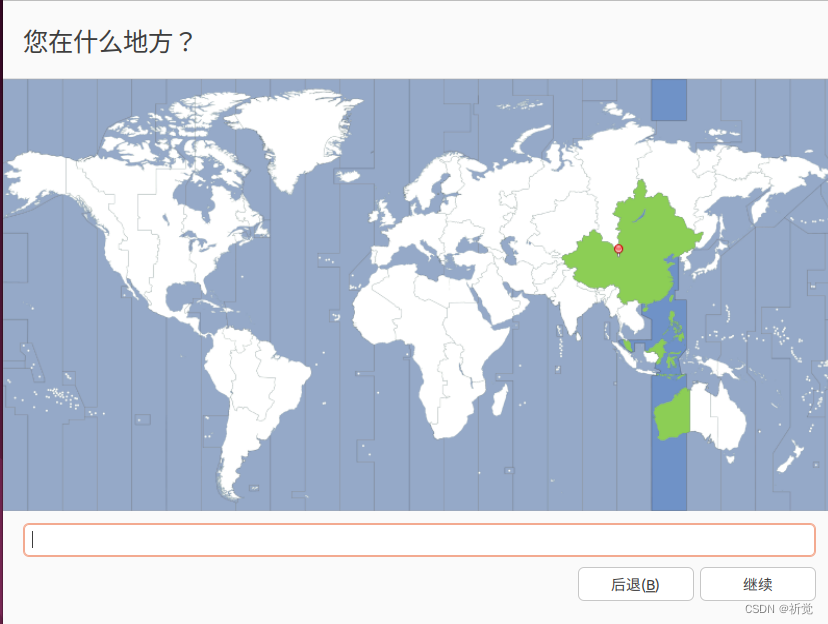
点击继续
 设置名字,密码,点击继续进行安装
设置名字,密码,点击继续进行安装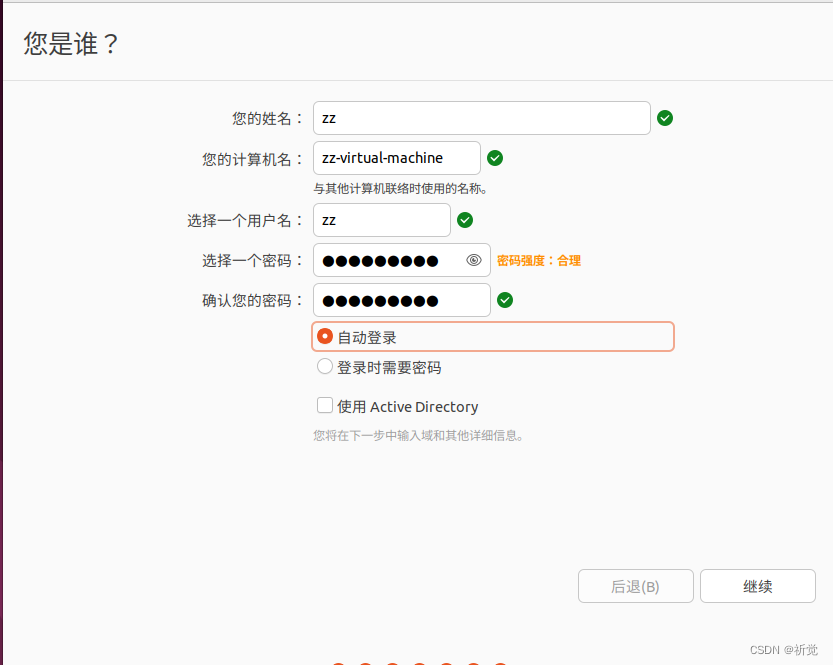
安装中

安装完成,重启即可
3、安装ros系统
(1)添加ros软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 
(2)添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

(3)更新软件源
sudo apt update 
(4)安装ros
sudo apt install ros-noetic-desktop-full
安装版本:
Ubuntu20.04:noetic
Ubuntu18.04:melodic
Ubuntu16.04: kinetic
Ubuntu14.04: indigo
(5)安装和使用rosdepc
安装
sudo pip install rosdepc如果没有pip可以试试pip3。
sudo pip3 install rosdepc如果pip3还没有
sudo apt-get install python3-pip
sudo pip install rosdepc使用
sudo rosdepc init
rosdepc update(6)设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc (7)安装rosinstall等工具
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential python3-roslaunch
(8)启动ros
输入roscore,安装完成
参考资料:
在ubuntu20.4下安装ROS-noetic(全步骤经反复验证成功)_ros-noetic-bfl_九三baba的博客-优快云博客
出现问题:

解决方法:
参考链接:https://blog.youkuaiyun.com/diaodaa/article/details/104516036
根据参考链接文章,依次输入:


然后重新安装ros

















 1649
1649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









