




 本文介绍了如何使用STM32CubeMX配置STM32F103C8T6驱动HC-SR04超声波模块进行距离测量,并将结果显示在串口助手上。文章详细阐述了超声波模块的工作原理,配置工程的步骤,以及关键代码实现,包括触发测距、捕获回波时间和滤波处理。最后,文章提到了在实际操作中遇到的问题及解决方法。
本文介绍了如何使用STM32CubeMX配置STM32F103C8T6驱动HC-SR04超声波模块进行距离测量,并将结果显示在串口助手上。文章详细阐述了超声波模块的工作原理,配置工程的步骤,以及关键代码实现,包括触发测距、捕获回波时间和滤波处理。最后,文章提到了在实际操作中遇到的问题及解决方法。
前言
环境:
1、硬件:stm32f103c8t6 核心板
2、软件:STM32CubeMX 6.4.0
3、软件:keil5 mdk
4、超声波模块:HC_SR04
要求:
使用 stm32f103c8t6 核心板驱动 超声波检测模块(HC_SR04 ),并将所测得数据显示到串口助手上,并对数据进行一定的滤波。
一、超声波模块介绍
1、产品特点
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:
(1)采用IO口 TRIG触发测距,给最少10us的高电平信呈。
(⑵)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;

2、超声波模块的时序图

以上时序图表明你只需要提供一个10uS 以上脉冲触发信号,该模块内部将发出8个40kHz周期电平并检测回波。一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度即(信号持续的高电平时间)与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。
二、STM32CubeMx创建工程
1、配置项目
这里跳过了创建工程的步骤,具体可看前面的博客,直接进入配置。
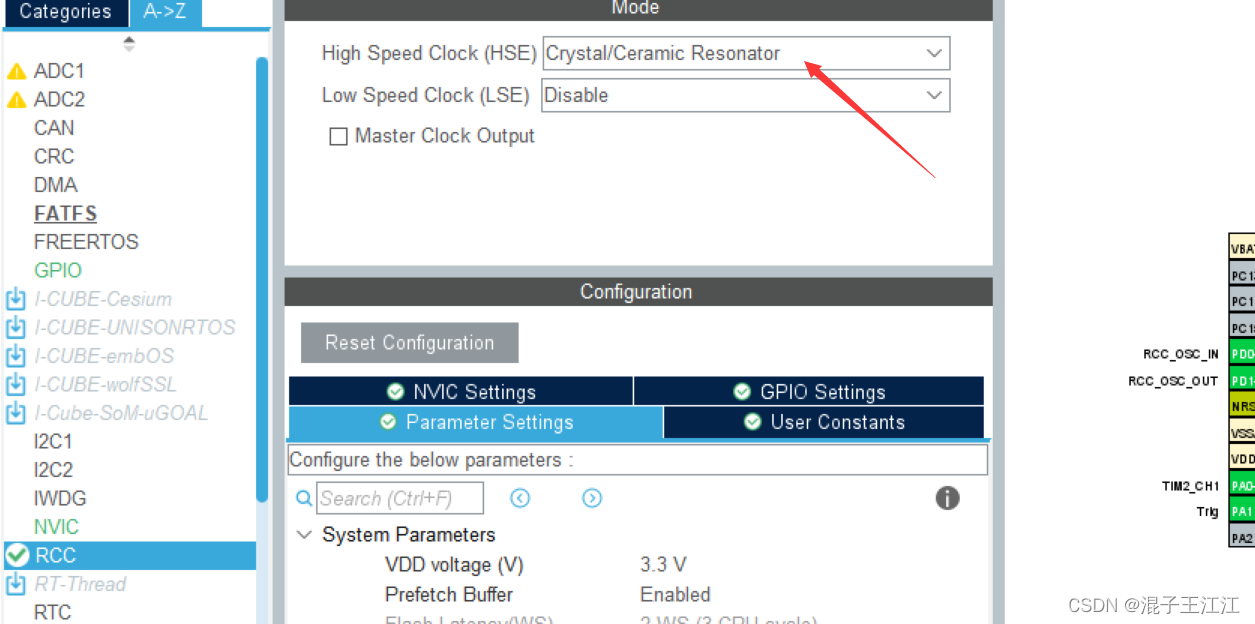
- RCC配置:
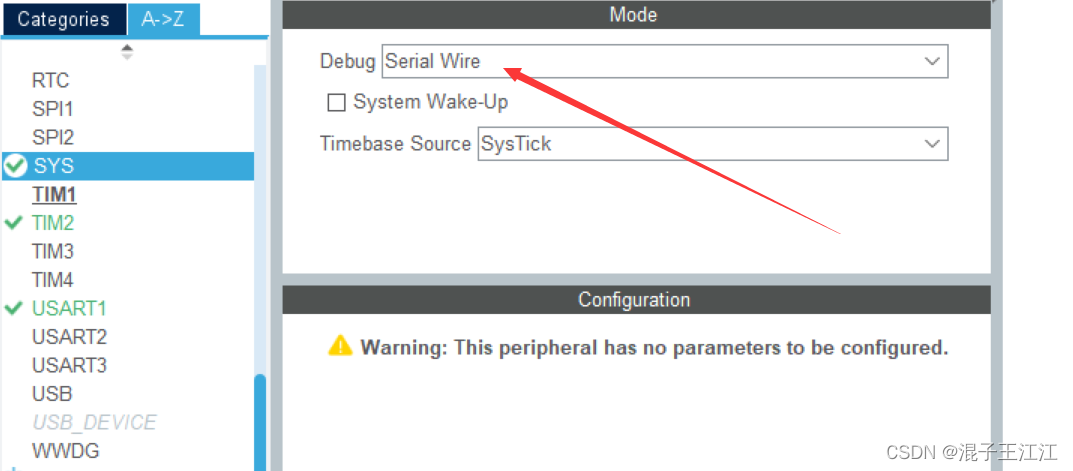
- SYS配置:
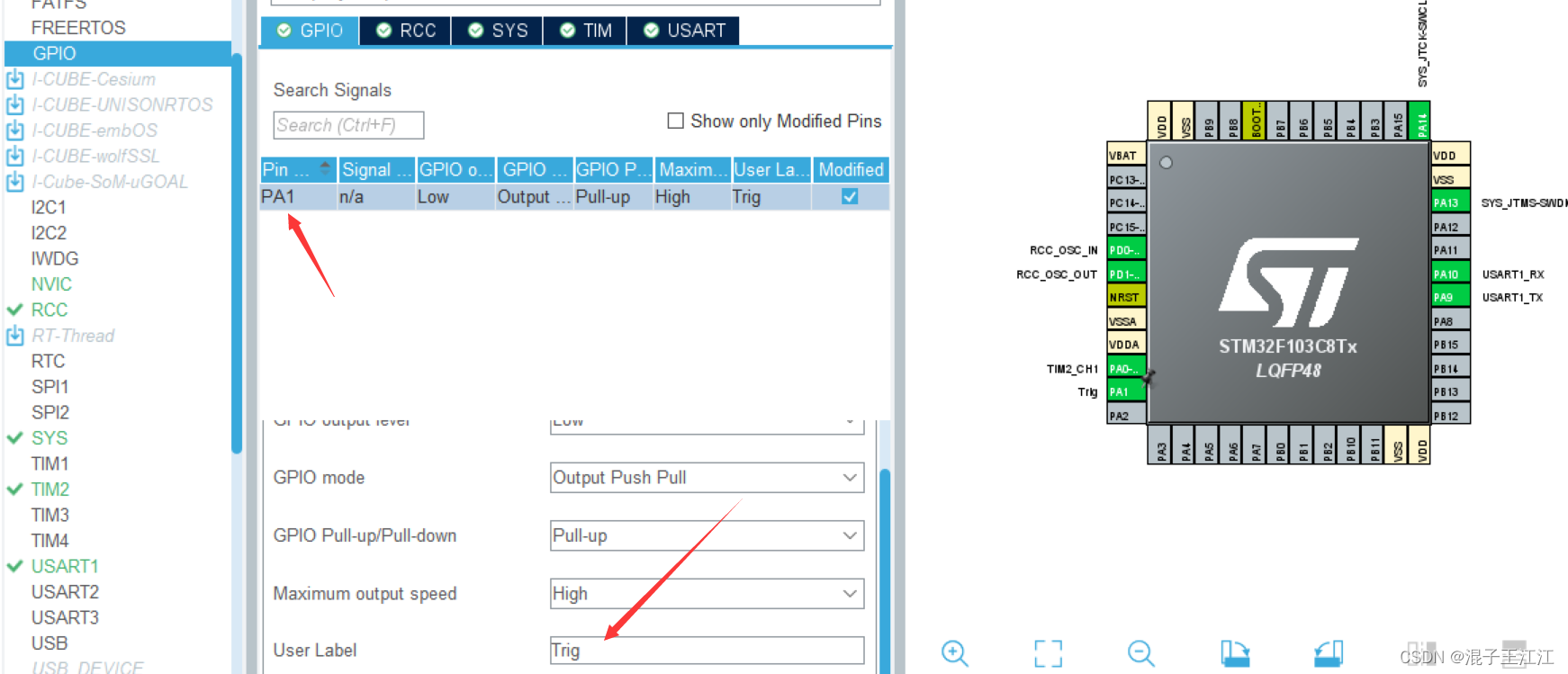
- GPIO设置:
将PA1自定义为TRIG
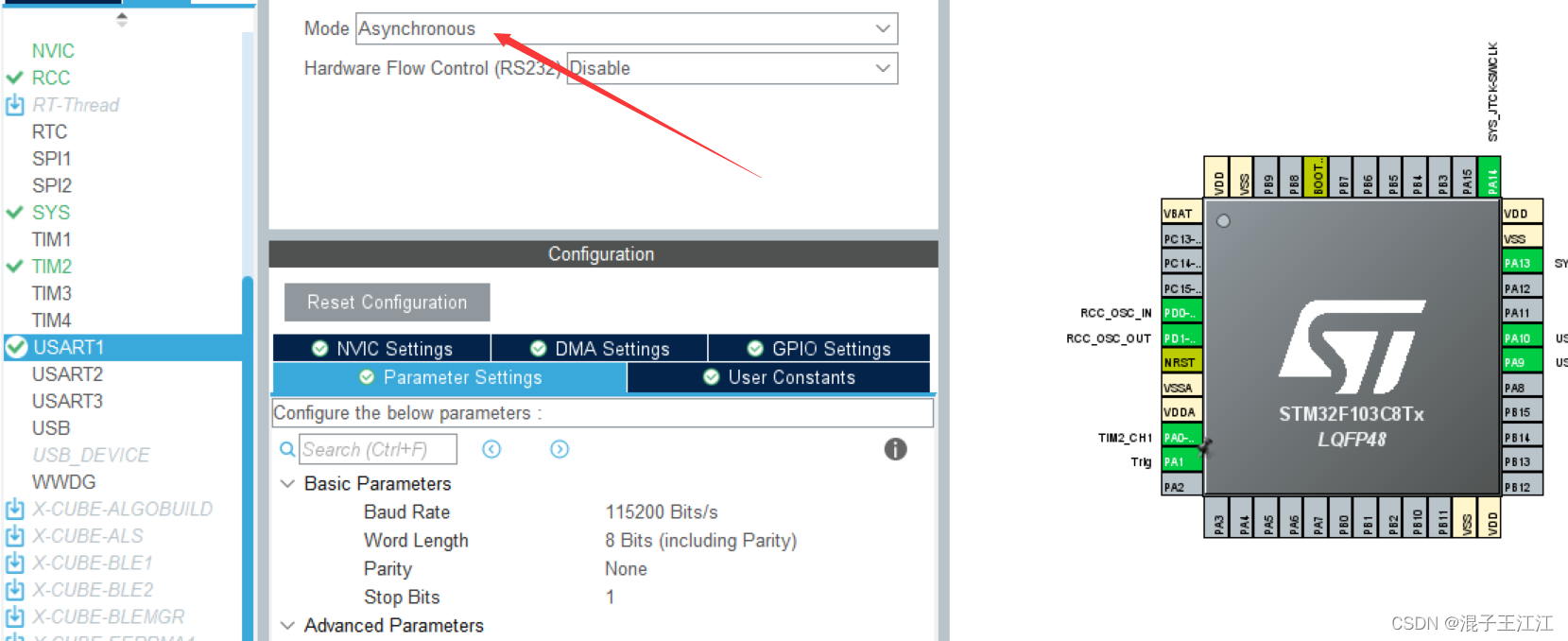
- 串口设置:
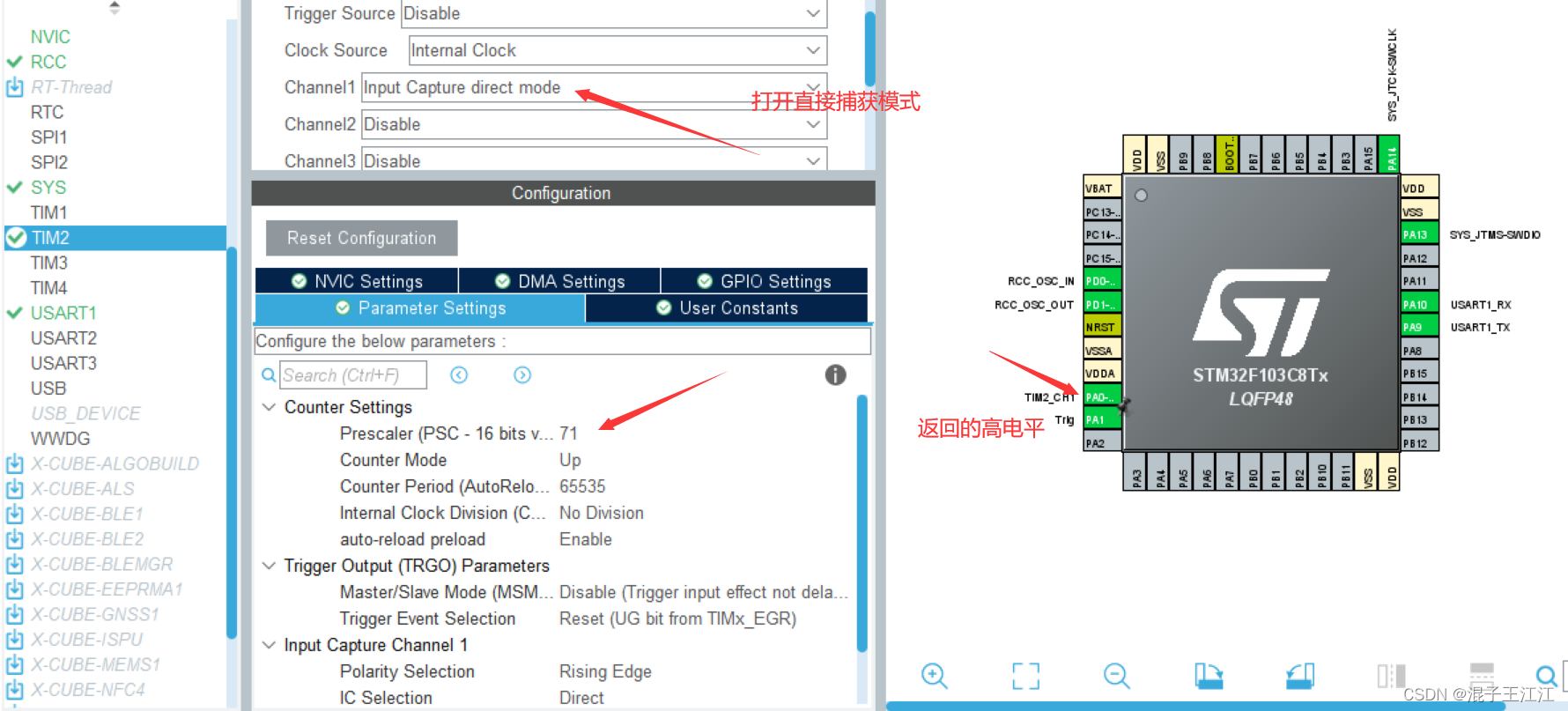
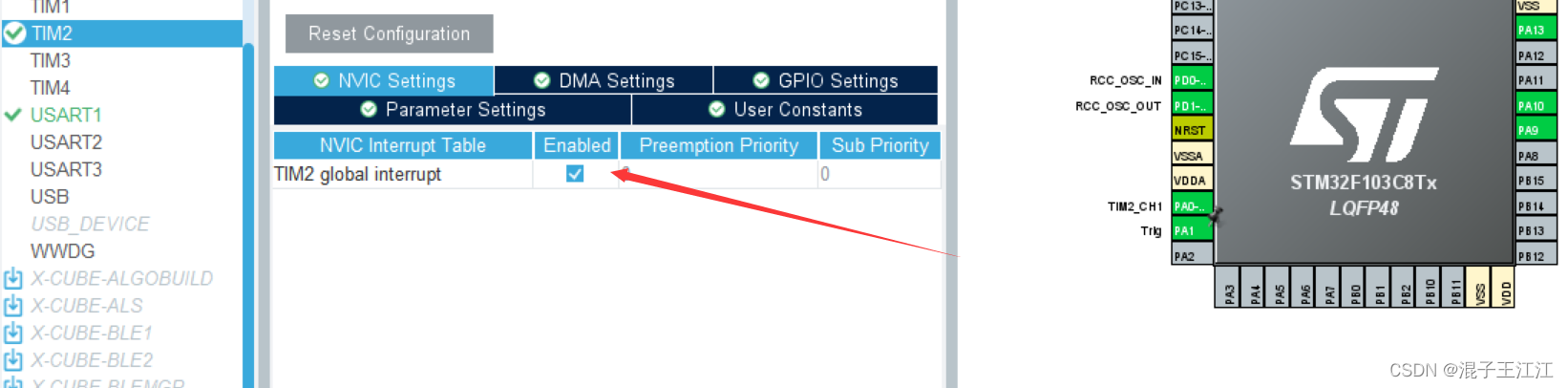
- 定时器设置:
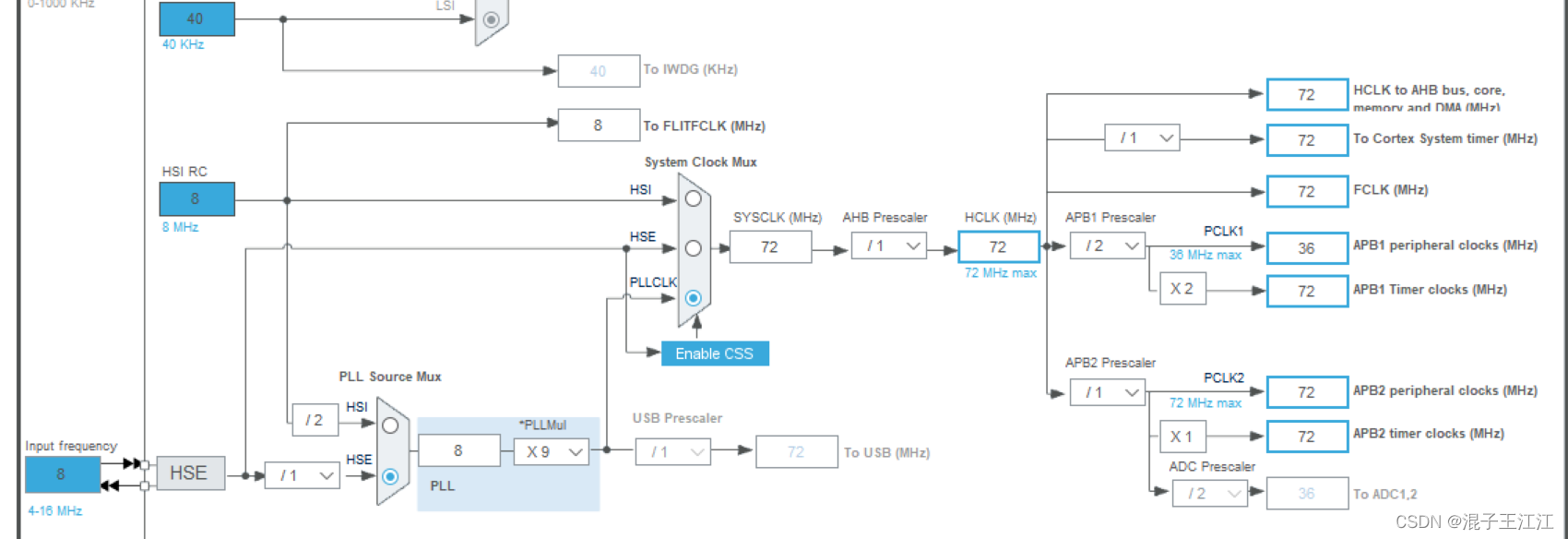
- 时钟树设置:
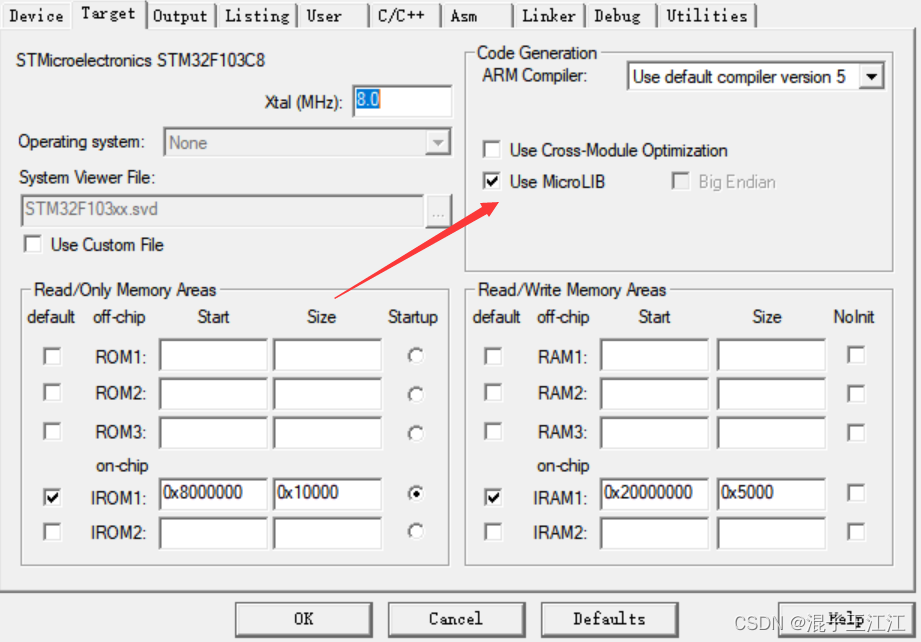
2、keil代码设置
- 设置允许使用微库:
- 添加SR04.c和SR04.h文件到工程中(具体看前面RT-thread Nano的移植过程):
- SR04.h
#ifndef __SR04_H
#define __SR04_H
#include "main.h"
#include "tim.h"
#include "stdio.h"
#define TRIG_H HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_SET)
#define TRIG_L HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_RESET)
void delay_us(uint32_t us);
void SR04_GetData(void);
#endif
- SR04.c
#include "SR04.h"
float distant; //测量距离
uint32_t measure_Buf[3] = {
0}; //存放定时器计数值的数组
float distances[5]={
0};
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间
uint8_t n=0;
//===============================================读取距离
void SR04_GetData(vo 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+




 到【灌水乐园】发言
到【灌水乐园】发言









