



背景:
深度强化学习以其可以自动学习特征和强大的拟合能力的特点,已经被应用于各个领域。
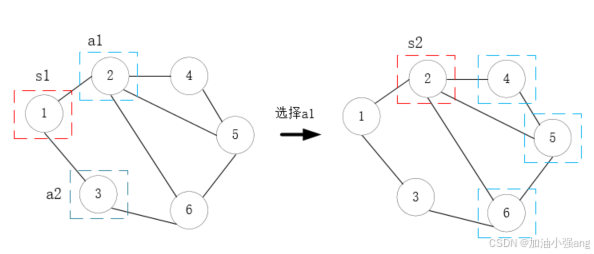
对于一个标准化的强化学习,动作空间的数量应该是确定的。但是也有很多场景,候选动作的数量是动态变化的,譬如光网络中的选路,举个例子,如果将当前所在节点视为状态,如果有两个节点和它相连,那下一跳的候选动作数是2,转移到新状态后,如果有三个节点和它相连,候选动作数又变成了3。
我们首先要知道,深度强化学习的输入和输出是什么。如附录中所示。
解决方法:
https://www.zhihu.com/question/417134029 来自这篇知乎
①如果单步状态下动作空间维度的最大值可知,则将该最大值当做动作空间,在学习时根据状态对不同的动作做mask,相当于做一个invalid action的学习;
解决方法如果想要soft constraint,即直接训练,当算法给到不能选的动作就给一个很差的收益,如果想要hard constraint, 那就是“屏蔽”(”mask out“)无效的操作,仅从有效操作中进行采样,然而这一过程仍未得到充分的研究。
②如果单步状态下动作空间维度的最大值未知,可能需要重新设计动作空间,如将离散动作空间连续化,在连续动作空间上学习,再将连续动作映射回每步对应的离散动作空间。
《 A Closer Look at Invalid Action Masking in Policy Gradient Algorithms》
回到我们的问题:
使用Q表对于此类问题较为好解决,相当于直接屏蔽无效解,但是,对于深度强化学习来说,不论是什么状态,输出的都是一个等长的向量。那么,如果使用DQN等模型,我们需要将其长度补齐。
怎么补齐:
怎么让智能体避开实际不存在的动作又不至于不收敛。
因为神经网络的输出维度是固定的,因此我们选择网络中的最大连接度,作为动作空间的维度。
有些动作是无效的,可以通过mask的方式,对无效动作进行掩蔽,加快网络收敛。
https://zhuanlan.zhihu.com/p/538953546
连续动作空间的模型可以解决离散的问题吗?
对于PPO这种输出是随机策略的模型,是可以另其输出动作概率来进行离散动作的选择。但是对于DDPG这种确定性策略,就难以解决离散问题。
本人遇到一些概念的厘清:
对于机器学习中的一些概念。一般以回归问题为例,先定义损失函数,1.Loss 损失,实际输出和预期的差异。2.反向传播,误差反方向乘系数向前传递。3.梯度下降,做参数更新的方法,有很多种方法。优化器就是控制怎么梯度下降的。4.逻辑回归,softmax回归是什么?都用于进行归一化。而逻辑回归一般用于多分类问题,而softmax则用于二分类,因为只有一个输入神经元。
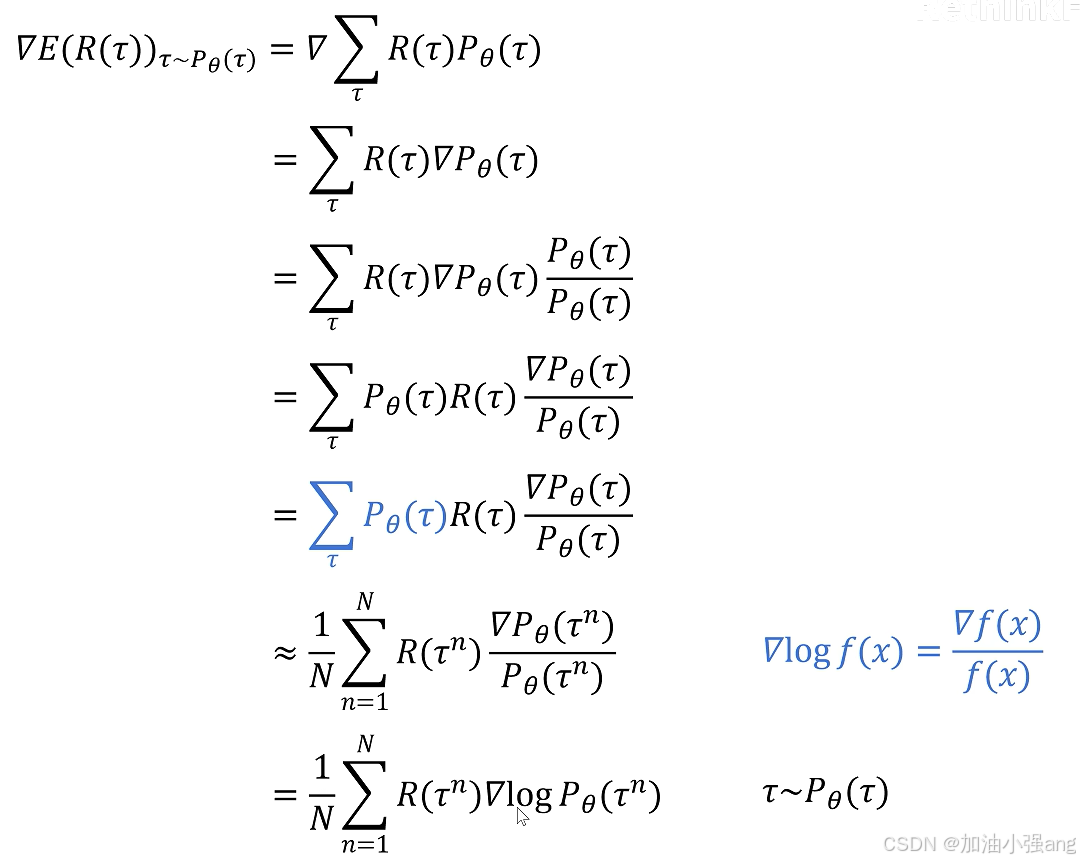
强化学习中的策略梯度:谁的梯度,要更新谁?回报R的梯度,要更新actor,或者critic神经网络参数。因为求的是最大回报,因此,是梯度上升。
对于Q-learning来说,损失函数是最小均方误差。
对于PPO来说,损失函数可详见推导。零基础学习强化学习算法:ppo_哔哩哔哩_bilibili
基于策略搜索的强化学习算法通常更倾向于on-policy方式,而基于值函数的算法则更加灵活,既可以采用on-policy方式,也可以采用off-policy方式。
- 直接对策略进行参数化表示和优化,因此通常需要对当前策略产生的样本进行充分利用,以确保策略的稳定性和收敛性。在训练过程中,如果频繁更换策略(即采用off-policy方式),可能会导致策略的不稳定性和难以收敛。
- 值函数本身并不直接依赖于策略,而是依赖于状态和动作,因此可以使用由不同策略产生的样本来更新值函数。这使得基于值函数的算法能够更容易地实现off-policy学习,从而利用更多样化的数据来改进策略。
附:强化学习模型的输入和输出
离散动作空间
-
Q-Learning
- 输入:当前状态s和可选动作集合A。
- 输出:在状态s下采取每个动作a的预期回报值Q(s, a)。
-
Deep Q-Network(DQN)
- 输入:当前状态s(通常是一个向量或矩阵,表示环境的状态信息)。
- 输出:在状态s下采取每个可能动作a的Q值(即预期回报值),通常是一个向量,向量的长度等于动作空间的大小。
-
Double Q-Learning
- 输入:与Q-Learning相同,为当前状态s和可选动作集合A。
- 输出:在状态s下采取每个动作a的预期回报值,但使用了两个独立的Q函数来减轻过估计问题。
-
SARSA(State-Action-Reward-State-Action)
- 输入:当前状态s、当前动作a、奖励r、下一个状态s'和下一个动作a'(这些信息通常在算法迭代过程中获得)。
- 输出:更新后的Q值表或Q函数,用于描述在给定状态下采取某个动作的预期回报。
连续动作空间
-
Deep Deterministic Policy Gradient(DDPG)
- 输入:当前状态s(通常是一个向量或矩阵,表示环境的状态信息)。
- 输出:一个确定性的动作a,这个动作是通过神经网络计算得到的,表示在当前状态下智能体应该采取的最优动作。
- 注:DDPG的核心思想是学习一个确定性策略,而不是随机策略。这使得代理系统更容易收敛到最佳策略。此外,DDPG还使用经验回放,将过去的经验存储在缓冲区中,并随机抽样用于训练,以减少样本相关性,提高学习效率。
同时适用
-
Actor-Critic
- 输入:当前状态s(对于Actor)和当前策略下的动作a及状态转移信息(对于Critic)。
- 输出:Actor输出下一个要采取的动作a',Critic输出为动作概率(对于离散动作空间而言)或者动作概率分布参数(对于连续动作空间而言)。
-
Trust Region Policy Optimization(TRPO)
- 输入:当前策略π和一组状态-动作对(s, a)。
- 输出:更新后的策略π',该策略在保持策略稳定性的同时尽可能提高回报。
-
Proximal Policy Optimization(PPO)
- 输入:与TRPO类似,为当前策略π和一组状态-动作对(s, a)。
- 输出:更新后的策略π',该策略通过限制策略更新的幅度来保持稳定性,并同时提高回报。
- 强化学习(3) PPO pytorch实例-优快云博客 PPO引入了重要度的概念,令off-policy模拟on-policy
-
Soft Actor-Critic(SAC)
- 输入:当前状态s和可选动作集合A(或动作空间的连续表示)。
- 输出:一个概率分布π(a|s),表示在给定状态s下采取每个动作a的概率。SAC算法通过最大化策略的熵来平衡探索和利用。
注:离散vs连续:
对于离散动作空间来说,可以使用Q-Learning或者DQN来进行更新,计算出每一个候选动作的Q值,但当动作空间维度增多或者连续,就难以使用这种方法。
![]()
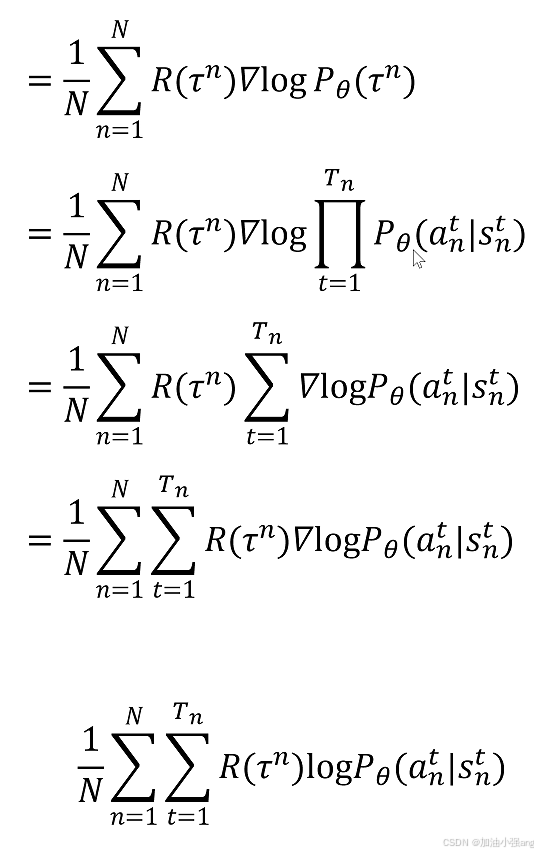
策略梯度的方法:
在一些连续场景,如金钱,方向等,难以使用离散的方式进行选择。可以使用策略梯度的方法,直接进行策略搜索。
注:随机策略vs确定策略
随机策略:如Q-learning使用E-greedy进行随机;如PPO输出的是动作的概率,使用正态分布对动作进行采样选择,即每个动作都有概率被选到
确定策略:如DDPG策略输出即是动作。如果想增加强化学习中的探索,可以加入噪声。
后续待解决:
多智能体深度强化学习选路的难点:
1.多智能体不同时到达终点状态。对每个agent加一个是否到达终点的状态信息。解决:用dones矩阵表示。
2.随着状态的变化,动作空间动态变化。解决:动作空间维度 = 网络拓扑中最大连接度
MDRL中,如QMIX具体是怎么更新模型的,底层用Q-learning不行吗?
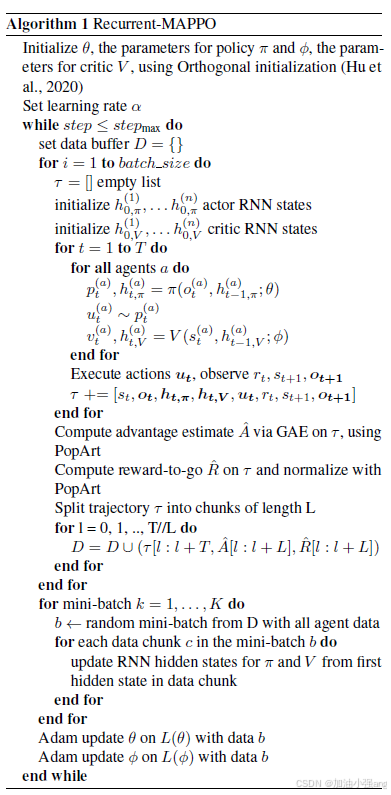
QMIX和MAPPO都是中心计算,分布执行的模型,每个agent根据自己的局部观测给出action,中心计算模型,将每个agent的action拼接起来,计算整体的v值,更新价值网络。QMIX底层是DQN,维护自己的Q神经网络。感觉底层是可以用Q-learning的,因为Qmix是根据输入的Q值计算的联合动作Q。
以下为MAPPO的伪代码。每个agent都把全局动作的奖励看做自己当前动作的奖励。

















 1281
1281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









