








论文分析ISP图像传感器的流程及其架构,进一步解释pipeline过程中涉及的一些问题。
简介
ISP图像处理算法实现的功能大致分为以下两类:
1、基于像素的处理
此类型ISP算法利用单个像素或其周围的像素来得到结果,可以被认为是一个空域滤波器,例如卷积类型的算法通常使用行缓存,在硬件实现中是实时处理的,即ISP流过一帧后所有像素值都已经处理完毕。
2、基于帧的处理
该类型的ISP算法需要一帧或多帧图像作为前提计算,即像素流过一帧后才能开始计算参数然后应用于图像中第一个像素,依次处理。如果仅需一帧,一般做法通常是使用上一帧计算得到的相关参数来实时处理当前帧。需要多帧处理的算法则更为复杂。
基于单帧的处理算法例如自动白平衡(AWB)、自动曝光(AE)、对比度增强,这些算法都需要统整个图像或区域的均值、最大最小值等,只有ISP Pipeline像素流过一帧后才能得到这些参数多帧算法如时间序列降噪,需要多帧的像素进行加权平均。
传统的isp除了自动曝光控制、自动白平衡和自动对焦(也称为3A或3自动)外,不处理基于帧的功能。例如,如果要通过考虑时间相关性来降低噪声,则必须存储至少两个图像帧来检查它是否可以被视为噪声。基本上,一个ISP已经被开发出来,可以嵌入到一个图像传感器中。由于这个要求,它不能与需要帧内存的函数一起工作。3A算法不需要帧内存,因为可以在扫描当前帧时可以提取3A所需要的全局特征。尽管它们被认为是基于框架的组件,但它们可以被认为是传统ISP体系结构中的基本组件,因为它们不需要框架内存本身。一般来说,ISP可以通过三种方式来实现。
第一种是基本ISP(Embedded ISP in an Image Sensor),它有一个由空间过滤器和点函数组成的级联Pipeline架构。允许的基于帧的函数仅限于3A算法,这不需要任何帧内存。
第二种(Discrete ISP Package):在ISP商业化的早期,基本ISP本身只是作为一个离散的芯片。如今,它通常是生产在一个多芯片封装与一个堆叠的SDRAM作为帧内存。由于它嵌入了帧内存,它可以支持基于帧的功能,如图像稳定、时间降噪、宽动态范围等。然而,它在处理那些来自计算机视觉技术的算法时仍然存在困难,计算机视觉技术也利用了存储在帧存储器中的图像,但需要大量的浮点运算和复杂的控制流程。
第三种(Embedded ISP Inside an AP):在应用程序处理器(AP)中有一些强大的编程单元,比如CPU/GPGPU。此外,应用程序处理器还提供了丰富的内存空间和带宽。因此基于像素处理的算法可以使用基本ISP实现,而基于帧的算法可以通过编程CPU/GPU来处理。这种形式的ISP实现消耗大量的算力,因为它使用耗电的内存设备和计算单元。然而,它可以提供最佳的图像质量。ISP的流水线线并不是标准化的,因此每个实现者都设计了许多非常相似但又不同的ISP Pipeline。
ISP 架构中的颜色重建
颜色感知
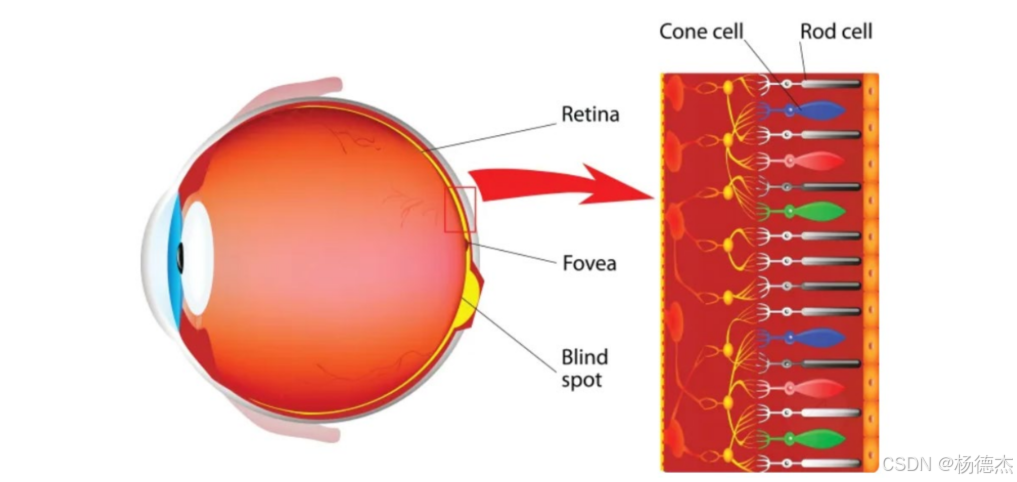
恢复“自然”颜色的过程是必要的,因为CMOS sensor对光的反应与人眼有很大的不同。颜色是人的眼睛的光感受器对光谱的反应。在有杆细胞和锥细胞的视网膜中,杆细胞感知亮度,锥细胞感知色度。在非常低的光线条件下,视觉体验完全由杆细胞决定。有三种不同类型的锥细胞,它们分别对不同波长的光具有不同的反应。颜色可以通过这些细胞被刺激的程度来定义和量化。
颜色空间
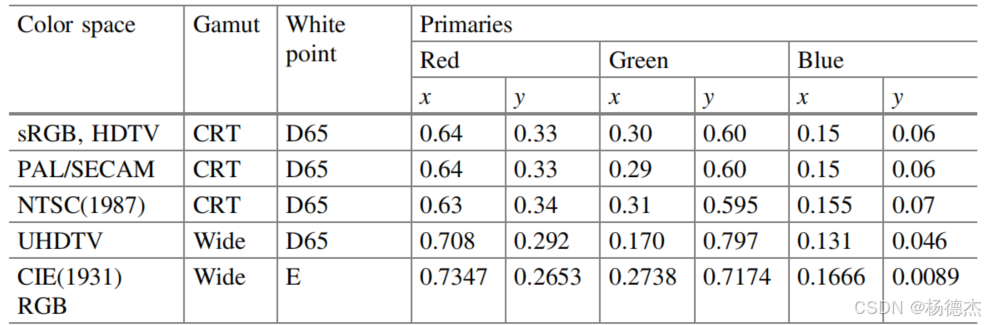
一个特定的RGB颜色空间是由红、绿、蓝加色的三个色度定义的,并且可以在三角形内产生任何色度,这些三角形的顶点由这些原色定义。原色是根据CIE 1931颜色空间中相应的色度坐标(x,y)来指定的。为了完全指定一个RGB颜色空间,需要额外定义一个白点和一个伽马校正曲线。下表总结了常用的RGB颜色空间的三原色(x,y)坐标和白点
要支持特定的RGB颜色空间,需要同时色调映射和颜色映射。前者是伽马修正,后者是颜色修正。伽马校正是非线性的,但颜色校正是线性的,通常通过3×3矩阵乘法来实现。在颜色校正中,颜色映射的结果不应受到被捕获场景的亮度水平的影响。
伽马校正的位置没有限制。伽马校正可以定位在颜色插值之前或颜色校正之后。即使经过颜色空间转换,也可以放置它。做伽马校正的目的是做一个非线性的色调映射(改善亮度)。只要能有效地实现这一目的,在ISP Pipeline中执行伽马校正的位置就不那么重要了。
自动白平衡(AWB)
AWB的研究原理是测量当前光源的色温。为此,场景中的消色差区域被用来估计色温,因为那里的颜色反映了光源的色温。灰色或白色区域是典型的消色色区域。消色区域是R、G、B和B分量的比值相同的区域。因此,AWB过程由等式建模。其中消色差区域的R、G和B成分的平均值分别记为R;
;
。
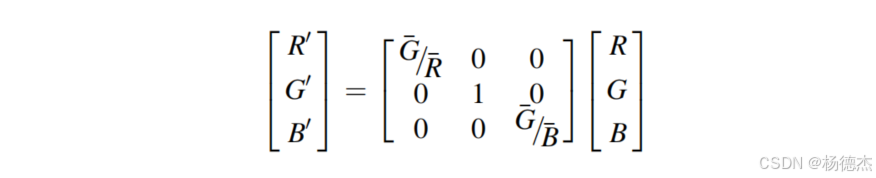
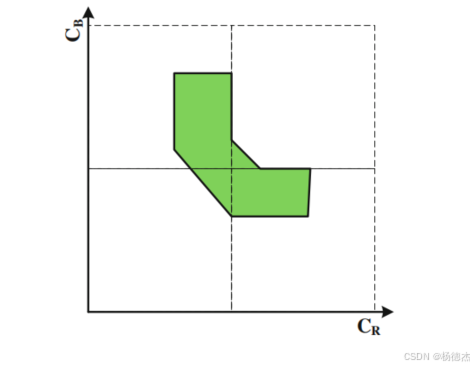
然而,在实际应用中,定位消色差区域几乎是不可能的;即使是人的眼睛有时也无法从自然场景中识别出它。然而,当环境光的色温发生变化时,也可以测量消色差区域的颜色变化。这种颜色的变化仅局限在色域的一个小区域内。通过绘制所有允许色温下消色差区域的CB-CR分量,可以在CB-CR平面上实验识别出该区域.
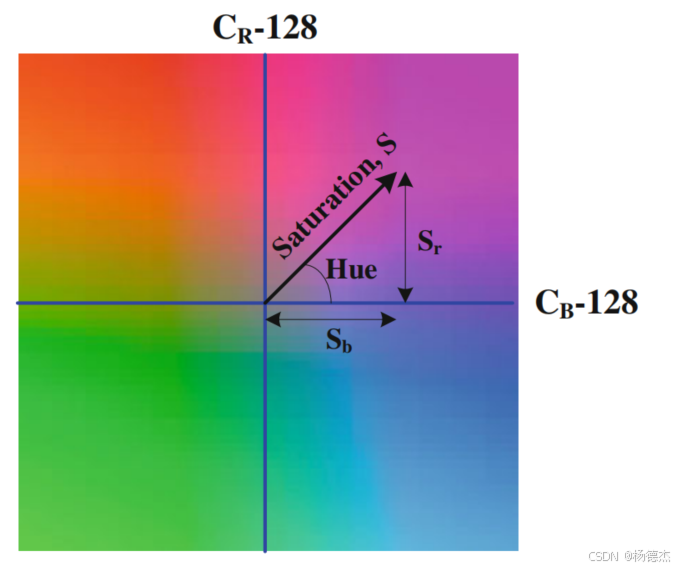
色调与饱和度控制
色度是一种颜色的客观规范,而不考虑其亮度,并进一步由色调和饱和度表示。
HSL(色相-饱和度-亮度)和HSV(色相-饱和度-值)是RGB颜色空间中两种最常见的点的圆柱坐标表示。
1、色调控制
色调是用于区分颜色的基准,通常说的红、橙、黄、绿、蓝、青、紫就是对颜色色调的描述

而饱和度是用于区分某种颜色的浑浊程度,例如如下表示红色的饱和度从左往右依次降低,逐渐暗淡变为中性色。


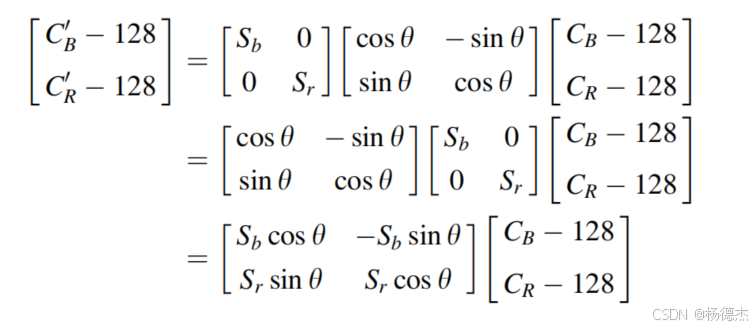
在Y-Cr-Cb空间中,色调转换使用以上公式。
2、饱和度控制

饱和度控制由以上公式
同时控制色调和饱和度时,公式如下:
ISP架构中的前预理和后处理
处理的目的是补偿传感器或相机的失真,从而可以通过传统的ISP管道获得稳健的图像。后处理的作用是从人类视觉系统的角度来看,提供更好的视觉质量。
坏点校正(DPC)
由于物理缺陷,图像传感器具有永久的亮像素或暗像素。它们被称为defective pixels,通常这些像素比相邻的像素更亮,去除它们可以采取以下方法:
1、基于滤波:可以通过中值滤波器将其去除。
2、基于OTP(One-Time Programmable,只允许编程一次,一旦被编程,数据永久有效):摄像头在出厂时会标定坏点位置保存在OTP中,但是对于低成本的摄像头来说,每颗摄像头都标定是得不偿失的,且还需要设计摄像头OTP区域的电路,因此这种方式的摄像头一般会用在昂贵的摄影设备上.
黑电平校准(BLC)
传感器的响应并没有完美的线性度。图像传感器的每个像素都是电容式光电二极管,每个像素中的电荷根据每个像素的入射光子进行放电。放电电荷以电压采样,视为像素值。自然地,它是不可能检测到无光条件下的,因为光电二极管总是由反向偏置电流放电,即使在无光条件下。为了检测对应于无光的传感器响应,任何图像传感器都有被称为光学黑色区域的专用传感器区域。光学黑色区域具有与普通像素相同的结构,但它是故意通过用金属覆盖光二极管而不暴露在光下的。因此,可以估计在无光条件下的传感器响应。由于在光学黑区域有R、G和B像素,如果从传感器输出中适当地减去光学黑区域的平均值,就可以实现在无光条件下有传感器对“零光照”的响应。BLC应该是在ISP Pipeline的早期阶段运行的功能,因为只有这个功能才能使传感器的响应呈线性变化。
镜头阴影校正(LSC)
每个像素在BLC后的大小和亮度都呈线性关系。然而,每个像素的线性斜率并不是恒定的,而是根据空间位置变化的。图像在光轴中心最亮,当图像到达视场边缘时,图像会单调地变暗。阴影可能是由于照明不均匀或相机灵敏度不均匀造成的。一般来说,这种阴影效果主要是由于镜头系统,被称为镜头阴影失真。

LSC(镜头阴影校正)是补偿由于镜头阴影而导致的每个像素的线性增益的差异的过程,这样所有像素都可以有相同的光到电压增益,无论它们在传感器阵列中的位置如何。LSC最简单和鲁棒的解决方案是通过校正增益来补偿阴影,该增益预先对每个像素进行估计,然后存储在内存中。这种方法被称为FFC(Flat Field Compensation,平场补偿)。
边缘增强(EE,Edge Enhancement)
边缘增强是一种数字处理技术。通过提高明暗交界处的过渡带梯度提高图像的锐度,一些伪影也是通过边缘增强引起的。增强是不完全可逆的,图像中的一些细节可能会由于增强而丢失。对生成的图像进行重复的锐化操作会导致细节的丢失,并导致被称为振铃的伪影。大多数锐化滤波器是基于一阶和二阶导数。如下拉普拉斯二阶导数

对比度增强
对比度是指在颜色和光线上的差异,使一个物体与其他物体和背景不同。人类的视觉系统对对比度比绝对亮度更敏感。

Kc为对比度控制增益参数,Kr为参考亮度,Kb为为亮度控制偏移量。
总结
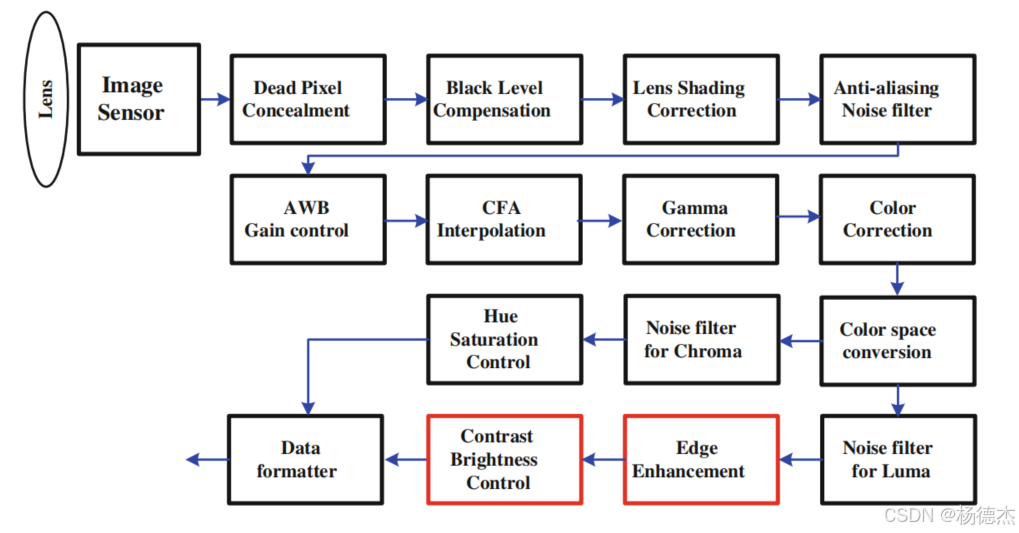
ISP本身是一个功能单元的流水线链路,其输入从前一个单元输入,处理后的输出被转移到下一个单元。在每个功能单元中,图像的每个像素都按顺序处理。当一个像素被处理时,只利用其相邻的像素,并且在像素周围定义一个小窗口,这样传入图像的一些线必须存储在存储器中。为了定义N×N窗口,至少N−1行被保存到内存中。换句话说,通常说N−1行记忆是必需的。这样一来,ISP就只利用了空间上本地化的信息。传统ISP的热门功能之一主要集中在真正的颜色重建上。
在环境色温不断变化下实现稳健的颜色质量正成为高质量ISP实现的关键要求。这是因为色度的剧烈变化对人的眼睛很敏感,而亮度的剧烈变化被认为是自然的。
当需要提供全局信息时,必须将整个图像保存在内存中。在这种情况下,内存需求非常巨大,以至于通过使用外部SDRAM来实现帧内存。当帧内存可用时,可以通过使用功能强大的CPU和/或GPGPU(通用图形处理单元)在软件中执行更复杂的功能。
近年来,许多研究开始扩展图像传感器的动态范围。WDR(宽动态范围)或HDR(高动态范围)意味着这样一种技术,通过分别使用两个或多个帧来扩展动态范围。

















 1749
1749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









