







经过我们前面的准备以后,小车已经被我们安装好了,现在就只需要上传代码了。(安装前应该先对各模块进行示例程序的上传来验证该模块的完整性,如果模块没问题再进行小车的接线与封装)
如图为我本次实验的小车成品与部分功能图片演示:
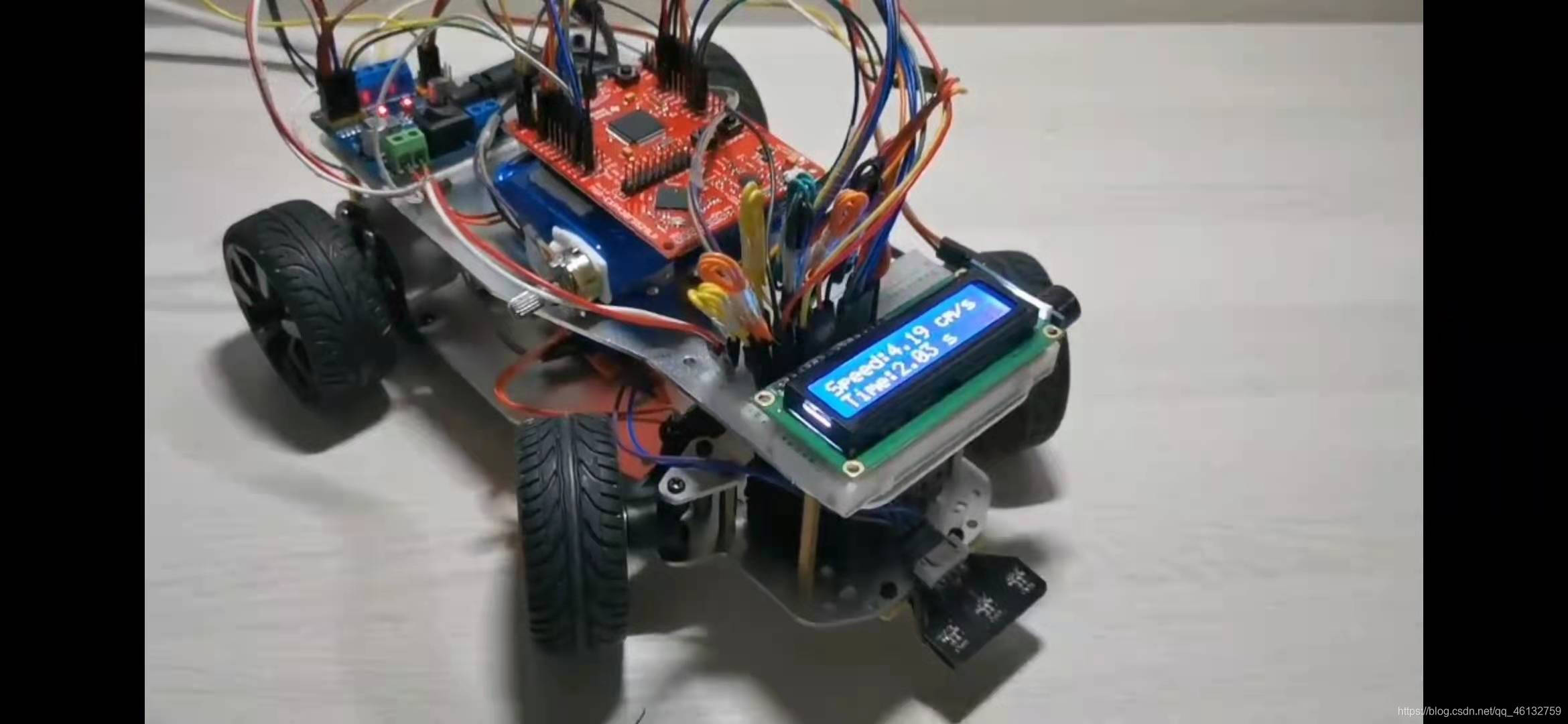
LCD显示实时速度与运行时间:

程序说明:
1.引脚定义与库的说明(仅需要定义伺服电机库-控制舵机转前轮;液晶屏显示库-控制LCD):
#include <Servo.h>
#include <LiquidCrystal.h>
//蜂鸣器端口定义
#define Buzz P1_6 //控制蜂鸣器
//前轮舵机端口定义
Servo carservo;
#define Servopin P2_0//控制舵机
//LCD显示屏端口定义
LiquidCrystal lcd(P8_1, P8_2, P4_3, P4_0, P3_7, P7_4);
//左电机端口定义
#define MotorLpin1 P4_1//控制位3
#define MotorLpin2 P4_2//控制位4
#define MotorLpwm P3_5 //使能调速 ENB
#define MotorLcountA P1_3 //编码器B
//右电机端口定义
#define MotorRpin1 P2_7//控制位1
#define MotorRpin2 P3_2 //控制位2
#define MotorRpwm P3_6 //使能调速 ENA
#define MotorRcountA P1_2 //编码器B
//三路传感器
#define sensor1 P6_0
#define sensor2 P6_1
#define sensor3 P6_22.PID速度控制前进部分:
为了使小车在不同坡度上能匀速前进,需要使用PID控制小车的速度,使小车平稳前进。题目要求在10-20s内走完1m的路程,故控制速度在13cm/s左右即可,不过可以调整。(PID控制速度部分参考博客 平衡小车之家PID代码 )
//控速变量
volatile float motorL=0;//中断变量,左轮子脉冲计数
volatile float motorR=0;//中断变量,右轮子脉冲计数
float V_L=0; //左轮速度 单位cm/s
float V_R=0; //右边轮速 单位cm/s
int v1=0; //单位cm/s
int v2=0; //单位cm/s
float Target_V_L=8,Target_V_R=8; //目标速度,单位cm/s
int Pwm_L=0,Pwm_R=0; //左右轮PWM
//PID变量
float kp=1.6,ki=0.8,kd=0; //PID参数
/*********************************************************
* 函数功能:增量式PI控制器(左轮)
*********************************************************/
int Incremental_Pi_L(int current_speed,int target_speed){
static float pwm,bias,last_bias,prev_bias; //静态变量存在程序全周期:pwm:增量输出,bias:本次偏差,last_bias:上次偏差,prev_bais_:上上次偏差
bias=current_speed-target_speed; //计算本次偏差e(k)
pwm-=(kp*(bias-last_bias)+ki*bias+kd*(bias-2*last_bias+prev_bias)); //增量式PID控制器
prev_bias=last_bias; //保存上上次偏差
last_bias=bias; //保存上一次偏差
//PWM 限幅度 Arduino的PWM 最高为255 限制在250
if(pwm<-250){
pwm=250;
}
if(pwm>250){
pwm=250;
}
//Serial.println(pwm);
return pwm; //增量输出
}
//右轮速度增量式PID控制器
int Incremental_Pi_R(float current_speed,float target_speed){
static float pwm,bias,last_bias,prev_bias; //静态变量存在程序全周期:pwm:增量输出,bias:本次偏差,last_bias:上次偏差,prev_bais_:上上次偏差
bias=current_speed-target_speed; //计算本次偏差e(k)
pwm-=(kp*(bias-last_bias)+ki*bias+kd*(bias-2*last_bias+prev_bias)); //增量式PID控制器
prev_bias=last_bias; //保存上上次偏差
last_bias=bias; //保存上一次偏差
//PWM 限幅度 Arduino的PWM 最高为255限制在250
if(pwm<-250){
pwm=250;
}
if(pwm>250){
pwm=250;
}
//Serial.println(pwm);
return pwm; //增量输出
}
void Set_Pwm(int speed_L,int speed_R){
//前进模式
//左电机
digitalWrite(MotorLpin1,HIGH);
digitalWrite(MotorLpin2,LOW);
analogWrite(MotorLpwm,speed_L);
//右电机
digitalWrite(MotorRpin1,LOW);
digitalWrite(MotorRpin2,HIGH);
analogWrite(MotorRpwm,speed_R);
// Serial.println("lello");
}
/***********************************
* 电机实际速度计算:
* 公式:
* 已知参数:
* 车轮直径65mm,
* 左边轮子一圈:390脉冲(RISING),
* 右边轮子一圈:390脉冲(RISING),
* 单位时间读两个轮子脉冲读取两个轮子脉冲
***********************************/
void Read_Moto_V(){
unsigned long nowtime=0;
motorL=0;
motorR=0;
nowtime=millis()+50;//读50毫秒
attachInterrupt(digitalPinToInterrupt(MotorLcountA),Read_Moto_L,RISING);//左轮脉冲开中断计数
attachInterrupt(digitalPinToInterrupt(MotorRcountA),Read_Moto_R,RISING);//右轮脉冲开中断计数
while(millis()<nowtime); //达到50毫秒关闭中断
detachInterrupt(digitalPinToInterrupt(MotorLcountA));//左轮脉冲关中断计数
detachInterrupt(digitalPinToInterrupt(MotorRcountA));//右轮脉冲关中断计数
//Serial.println(motorL*100);
//Serial.println(motorR*100);
V_L=((motorL/390)*6.5*PI)/0.05; //单位cm/s
V_R=((motorR/390)*6.5*PI)/0.05; //单位cm/s
v1=V_L;
v2=V_R;
}
/***************************
* 中断函数:读左轮脉冲
**************************/
void Read_Moto_L(){
motorL++;
}
/**************************
* 中断函数:读右轮脉冲
*************************/
void Read_Moto_R(){
motorR++;
}
//前进函数
void RUN(int RV,int LV){
Target_V_L=LV,Target_V_R=RV;
Read_Moto_V();//读取脉冲计算速度
Pwm_L=Incremental_Pi_L(V_L,Target_V_L);//左轮PI运算
Pwm_R=Incremental_Pi_R(V_R,Target_V_R);//右轮PI运算
//Serial.println(V_L); //直接用串口绘图画出速度曲线
Set_Pwm(Pwm_L,Pwm_R); //设置左右轮速度
}
3.终点停车(当三路循迹全检测到黑时停止工作):
//终点停车函数
void Stop(){
//左电机
digitalWrite(MotorLpin1,LOW);
digitalWrite(MotorLpin2,LOW);
//右电机
digitalWrite(MotorRpin1,LOW);
digitalWrite(MotorRpin2,LOW);
//声音提示
digitalWrite(Buzz,HIGH);
delay(500);
digitalWrite(Buzz,LOW);
delay(1000);
while(1);
}4.LCD显示速度和运行时间(LCD显示具体用法网上随处可查,在此不作过多说明):
void LCDshow(){
lcd.setCursor(0, 0);
lcd.print("Speed:");
lcd.setCursor(6, 0);
lcd.print(V_L);
lcd.setCursor(11, 0);
lcd.print("cm/s");
lcd.setCursor(0, 1);
lcd.print("Time:");
lcd.setCursor(5, 1);
lcd.print(millis()*0.001);
lcd.setCursor(10, 1);
lcd.print("s");
}5.循迹部分:
循迹部分红外传感器采集到的是模拟量,从0-4095;然后经过多次尝试采集到黑与白的分界阈值为200(不同场景阈值不同,自己测量即可);舵机转角也是经过多次调试确定下来的,不同小车一般不同,也需要自己调整。(RUN()函数在前面已经定义过了)
void Track(){
int data[3];
data[0] = analogRead(sensor1);//读取四个传感器值
data[0] = map(data[0], 0, 4095, 0, 1000);
data[1] = analogRead(sensor2);
data[1] = map(data[1], 0, 4095, 0, 1000);
data[2] = analogRead(sensor3);
data[2] = map(data[2], 0, 4095, 0, 1000);
if(data[0]<200&&data[1]>200&&data[2]<200){
carservo.write(82);
delay(15);
RUN(6,6);
}
else if((data[0]<200&&data[1]<200&&data[2]<200)&&carservo.read()<100&&carservo.read()>70){
RUN(6,6);
}
else if((data[0]<200&&data[1]<200&&data[2]<200)&&carservo.read()>100){
RUN(6,10);
}
else if(data[0]>200&&data[1]<200&&data[2]<200)
Turn_right();
else if(data[0]<200&&data[1]<200&&data[2]>200)
Turn_left();
else if(data[0]>200&&data[1]>200&&data[2]>200)
Stop();
/*Serial.println(data[0]);
Serial.println(data[1]);
Serial.println(data[2]);
Serial.println("--------------");*/
}
//右转函数
void Turn_right(){
carservo.write(140);//调整舵机角度 140 9.8 2.2
delay(15);
RUN(6,10);//后轮差速(右,左),左快右慢
}
//左转函数
void Turn_left(){
carservo.write(60);//调整舵机角度
delay(15);
RUN(10,6);//后轮差速(右,左),左慢右快
}6.setup与loop:
/**************************************
* 初始化函数
*************************************/
void setup() {
//LCD初始化
lcd.begin(16, 2);
lcd.print("Start");
Motor_Init();//电机端口初始化
Servo_Init();//舵机端口初始化
pinMode(Buzz,OUTPUT);//蜂鸣器初始化
//循迹初始化
pinMode(sensor1,INPUT);
pinMode(sensor2,INPUT);
pinMode(sensor3,INPUT);
Serial.begin(9600);//开启串口
}
void Servo_Init(){
carservo.attach(Servopin);
carservo.write(82);
delay(15);
}
void Motor_Init(){
//左电机
pinMode(MotorLpin1,OUTPUT); //驱动芯片控制引脚
pinMode(MotorLpin2,OUTPUT); //驱动芯片控制引脚
pinMode(MotorLpwm,OUTPUT); //驱动芯片控制引脚,PWM调速
pinMode(MotorLcountA,INPUT); //左轮编码器B引脚
//右电机
pinMode(MotorRpin1,OUTPUT); //驱动芯片控制引脚
pinMode(MotorRpin2,OUTPUT); //驱动芯片控制引脚
pinMode(MotorRpwm,OUTPUT); //驱动芯片控制引脚,PWM调速
pinMode(MotorRcountA,INPUT); //右轮编码器B引脚
//驱动芯片控制引脚全部拉低
digitalWrite(MotorLpin1,LOW); //左电机
digitalWrite(MotorLpin2,LOW);
digitalWrite(MotorLpwm,LOW);
digitalWrite(MotorRpin1,LOW); //右电机
digitalWrite(MotorRpin2,LOW);
digitalWrite(MotorRpwm,LOW);
}
/***************************************
* 主循环
***************************************/
void loop() {
LCDshow();
Track();
}综上,把各部分代码上传后运行小车,根据问题来调整一些代码部分和参数,就可以实现我们的功能。最后附上完整代码:
#include <Servo.h>
#include <LiquidCrystal.h>
//蜂鸣器端口定义
#define Buzz P1_6 //控制蜂鸣器
//前轮舵机端口定义
Servo carservo;
#define Servopin P2_0//控制舵机
//LCD显示屏端口定义
LiquidCrystal lcd(P8_1, P8_2, P4_3, P4_0, P3_7, P7_4);
//左电机端口定义
#define MotorLpin1 P4_1//控制位3
#define MotorLpin2 P4_2//控制位4
#define MotorLpwm P3_5 //使能调速 ENB
#define MotorLcountA P1_3 //编码器B
//右电机端口定义
#define MotorRpin1 P2_7//控制位1
#define MotorRpin2 P3_2 //控制位2
#define MotorRpwm P3_6 //使能调速 ENA
#define MotorRcountA P1_2 //编码器B
//四路传感器
#define sensor1 P6_0
#define sensor2 P6_1
#define sensor3 P6_2
//控速变量
volatile float motorL=0;//中断变量,左轮子脉冲计数
volatile float motorR=0;//中断变量,右轮子脉冲计数
float V_L=0; //左轮速度 单位cm/s
float V_R=0; //右边轮速 单位cm/s
int v1=0; //单位cm/s
int v2=0; //单位cm/s
float Target_V_L=8,Target_V_R=8; //目标速度,单位cm/s
int Pwm_L=0,Pwm_R=0; //左右轮PWM
//PID变量
float kp=1.6,ki=0.8,kd=0; //PID参数
/**************************************
* 初始化函数
*************************************/
void setup() {
//LCD初始化
lcd.begin(16, 2);
lcd.print("Start");
Motor_Init();//电机端口初始化
Servo_Init();//舵机端口初始化
pinMode(Buzz,OUTPUT);//蜂鸣器初始化
//循迹初始化
pinMode(sensor1,INPUT);
pinMode(sensor2,INPUT);
pinMode(sensor3,INPUT);
Serial.begin(9600);//开启串口
}
void Servo_Init(){
carservo.attach(Servopin);
carservo.write(82);
delay(15);
}
void Motor_Init(){
//左电机
pinMode(MotorLpin1,OUTPUT); //驱动芯片控制引脚
pinMode(MotorLpin2,OUTPUT); //驱动芯片控制引脚
pinMode(MotorLpwm,OUTPUT); //驱动芯片控制引脚,PWM调速
pinMode(MotorLcountA,INPUT); //左轮编码器B引脚
//右电机
pinMode(MotorRpin1,OUTPUT); //驱动芯片控制引脚
pinMode(MotorRpin2,OUTPUT); //驱动芯片控制引脚
pinMode(MotorRpwm,OUTPUT); //驱动芯片控制引脚,PWM调速
pinMode(MotorRcountA,INPUT); //右轮编码器B引脚
//驱动芯片控制引脚全部拉低
digitalWrite(MotorLpin1,LOW); //左电机
digitalWrite(MotorLpin2,LOW);
digitalWrite(MotorLpwm,LOW);
digitalWrite(MotorRpin1,LOW); //右电机
digitalWrite(MotorRpin2,LOW);
digitalWrite(MotorRpwm,LOW);
}
/*********************************************************
* 函数功能:增量式PI控制器(左轮)
*********************************************************/
int Incremental_Pi_L(int current_speed,int target_speed){
static float pwm,bias,last_bias,prev_bias; //静态变量存在程序全周期:pwm:增量输出,bias:本次偏差,last_bias:上次偏差,prev_bais_:上上次偏差
bias=current_speed-target_speed; //计算本次偏差e(k)
pwm-=(kp*(bias-last_bias)+ki*bias+kd*(bias-2*last_bias+prev_bias)); //增量式PID控制器
prev_bias=last_bias; //保存上上次偏差
last_bias=bias; //保存上一次偏差
//PWM 限幅度 Arduino的PWM 最高为255 限制在250
if(pwm<-250){
pwm=250;
}
if(pwm>250){
pwm=250;
}
//Serial.println(pwm);
return pwm; //增量输出
}
//右轮速度增量式PID控制器
int Incremental_Pi_R(float current_speed,float target_speed){
static float pwm,bias,last_bias,prev_bias; //静态变量存在程序全周期:pwm:增量输出,bias:本次偏差,last_bias:上次偏差,prev_bais_:上上次偏差
bias=current_speed-target_speed; //计算本次偏差e(k)
pwm-=(kp*(bias-last_bias)+ki*bias+kd*(bias-2*last_bias+prev_bias)); //增量式PID控制器
prev_bias=last_bias; //保存上上次偏差
last_bias=bias; //保存上一次偏差
//PWM 限幅度 Arduino的PWM 最高为255限制在250
if(pwm<-250){
pwm=250;
}
if(pwm>250){
pwm=250;
}
//Serial.println(pwm);
return pwm; //增量输出
}
void Set_Pwm(int speed_L,int speed_R){
//前进模式
//左电机
digitalWrite(MotorLpin1,HIGH);
digitalWrite(MotorLpin2,LOW);
analogWrite(MotorLpwm,speed_L);
//右电机
digitalWrite(MotorRpin1,LOW);
digitalWrite(MotorRpin2,HIGH);
analogWrite(MotorRpwm,speed_R);
// Serial.println("lello");
}
/***********************************
* 电机实际速度计算:
* 公式:
* 已知参数:
* 车轮直径65mm,
* 左边轮子一圈:390脉冲(RISING),
* 右边轮子一圈:390脉冲(RISING),
* 单位时间读两个轮子脉冲读取两个轮子脉冲
***********************************/
void Read_Moto_V(){
unsigned long nowtime=0;
motorL=0;
motorR=0;
nowtime=millis()+50;//读50毫秒
attachInterrupt(digitalPinToInterrupt(MotorLcountA),Read_Moto_L,RISING);//左轮脉冲开中断计数
attachInterrupt(digitalPinToInterrupt(MotorRcountA),Read_Moto_R,RISING);//右轮脉冲开中断计数
while(millis()<nowtime); //达到50毫秒关闭中断
detachInterrupt(digitalPinToInterrupt(MotorLcountA));//左轮脉冲关中断计数
detachInterrupt(digitalPinToInterrupt(MotorRcountA));//右轮脉冲关中断计数
//Serial.println(motorL*100);
//Serial.println(motorR*100);
V_L=((motorL/390)*6.5*PI)/0.05; //单位cm/s
V_R=((motorR/390)*6.5*PI)/0.05; //单位cm/s
v1=V_L;
v2=V_R;
}
/***************************
* 中断函数:读左轮脉冲
**************************/
void Read_Moto_L(){
motorL++;
}
/**************************
* 中断函数:读右轮脉冲
*************************/
void Read_Moto_R(){
motorR++;
}
//前进函数
void RUN(int RV,int LV){
Target_V_L=LV,Target_V_R=RV;
Read_Moto_V();//读取脉冲计算速度
Pwm_L=Incremental_Pi_L(V_L,Target_V_L);//左轮PI运算
Pwm_R=Incremental_Pi_R(V_R,Target_V_R);//右轮PI运算
//Serial.println(V_L); //直接用串口绘图画出速度曲线
Set_Pwm(Pwm_L,Pwm_R); //设置左右轮速度
}
//终点停车函数
void Stop(){
//左电机
digitalWrite(MotorLpin1,LOW);
digitalWrite(MotorLpin2,LOW);
//右电机
digitalWrite(MotorRpin1,LOW);
digitalWrite(MotorRpin2,LOW);
//声音提示
digitalWrite(Buzz,HIGH);
delay(500);
digitalWrite(Buzz,LOW);
delay(1000);
while(1);
}
void LCDshow(){
lcd.setCursor(0, 0);
lcd.print("Speed:");
lcd.setCursor(6, 0);
lcd.print(V_L);
lcd.setCursor(11, 0);
lcd.print("cm/s");
lcd.setCursor(0, 1);
lcd.print("Time:");
lcd.setCursor(5, 1);
lcd.print(millis()*0.001);
lcd.setCursor(10, 1);
lcd.print("s");
}
void Track(){
int data[3];
data[0] = analogRead(sensor1);//读取四个传感器值
data[0] = map(data[0], 0, 4095, 0, 1000);
data[1] = analogRead(sensor2);
data[1] = map(data[1], 0, 4095, 0, 1000);
data[2] = analogRead(sensor3);
data[2] = map(data[2], 0, 4095, 0, 1000);
if(data[0]<200&&data[1]>200&&data[2]<200){
carservo.write(82);
delay(15);
RUN(6,6);
}
else if((data[0]<200&&data[1]<200&&data[2]<200)&&carservo.read()<100&&carservo.read()>70){
RUN(6,6);
}
else if((data[0]<200&&data[1]<200&&data[2]<200)&&carservo.read()>100){
RUN(6,10);
}
else if(data[0]>200&&data[1]<200&&data[2]<200)
Turn_right();
else if(data[0]<200&&data[1]<200&&data[2]>200)
Turn_left();
else if(data[0]>200&&data[1]>200&&data[2]>200)
Stop();
/*Serial.println(data[0]);
Serial.println(data[1]);
Serial.println(data[2]);
Serial.println("--------------");*/
}
//右转函数
void Turn_right(){
carservo.write(140);//调整舵机角度 140 9.8 2.2
delay(15);
RUN(6,10);//后轮差速(右,左),左快右慢
}
//左转函数
void Turn_left(){
carservo.write(60);//调整舵机角度
delay(15);
RUN(10,6);//后轮差速(右,左),左慢右快
}
/***************************************
* 主循环
***************************************/
void loop() {
LCDshow();
Track();
}
















 2367
2367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









