







一、本文介绍
🔥本文给大家介绍利用将 CNCM模块 改进 YOLOv13的DSC3k2模块 ,能够显著提升目标检测任务的性能,尤其在噪声较大、背景复杂或低对比度的情况下。CNCM通过增强列特征的处理、去除条纹噪声、改善列之间的依赖性,增强了YOLOv13的检测精度和鲁棒性,尤其在小物体和边界精准定位方面具有显著优势。
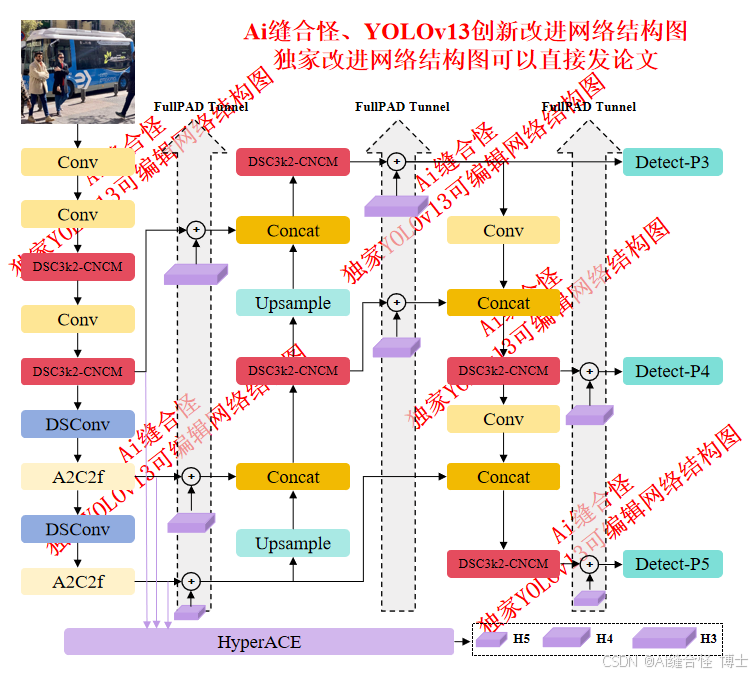
展示部分YOLOv13改进后的网络结构图、供小伙伴自己绘图参考:
🚀 创新改进结构图: yolov13n_DSC3k2_CNCM.yaml
专栏改进目录:YOLOv13改进包含各种卷积、主干网络、各种注意力机制、检测头、损失函数、Neck改进、小目标检测、二次创新模块、HyperACE二次创新、独家创新等几百种创新点改进。
全新YOLOv13创新改进专栏链接:全新YOLOv13创新改进高效涨点+永久更新中(至少500+改进)+高效跑实验发论文
本文目录
1.首先在ultralytics/nn/newsAddmodules创建一个.py文件
2.在ultralytics/nn/newsAddmodules/__init__.py中引用
🚀 创新改进1: yolov13n_DSC3k2_CNCM.yaml
🚀 创新改进2: yolov13n_DSC3k2_CNCM2.yaml
二、CNCM模块介绍
摘要:在实际的红外(IR)成像系统中,有效地学习一致的条纹噪声去除模型是至关重要的。大多数现有的去条纹方法由于跨层语义差距和对全局列特征的不足表征,无法精确重建图像。为了解决这一问题,我们提出了一种新型的IR图像去条纹方法,称为 非对称采样校正网络(ASCNet),该方法能够有效地捕捉全局列关系并将其嵌入到一个U形框架中,提供全面的判别表示和无缝的语义连接。我们的ASCNet由三个核心元素组成:残差Haar离散小波变换(RHDWT)、像素重排(PS)和列非均匀性校正模块(CNCM)。具体来说,RHDWT是一种新颖的下采样方法,它采用双分支建模,有效地将条纹方向先验知识与数据驱动的语义交互结合起来,从而丰富特征表示。考虑到条纹噪声的语义模式串扰,PS被引入作为上采样器,防止过度先验解码,并进行无语义偏差的图像重建。在每次采样之后,CNCM捕捉列关

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









