







https://download.youkuaiyun.com/download/qq_45685327/87720130
1. 新建 Xacro 文件,配置 kinetic传感器信息
kinect.xacro
这里注意没有单独为了深度相机设置的连杆,我们采用激光雷达的连杆,先暂时用一下
reference = support
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<gazebo reference="support">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>support</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</robot>
2 .xacro 文件集成
deamo05_Gazebocar.xacro
<robot name="xacrocar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="head.xacro" />
<xacro:include filename="deamo02_base.xacro" />
<xacro:include filename="deamo03_camera.xacro" />
<xacro:include filename="deamo04_laser.xacro" />
<xacro:include filename="gazebo/move.xacro" />
<xacro:include filename="gazebo/laser.xacro" />
<xacro:include filename="gazebo/camera.xacro" />
<xacro:include filename="gazebo/kinect.xacro" />
</robot>
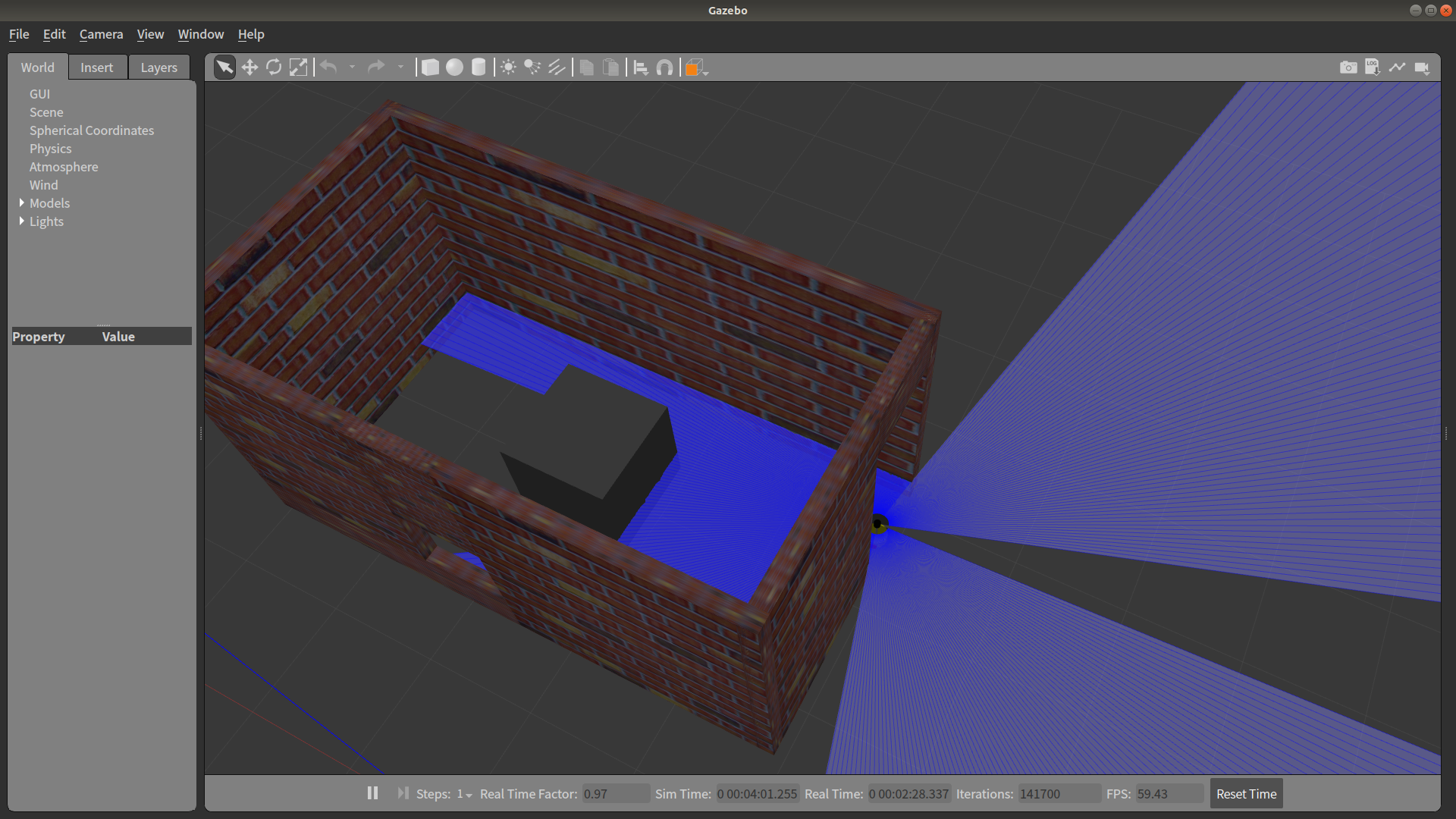
3.启动仿真环境
运行lanuch文件,这里不需要重新编写launch,用上一节的就可以。
deamo03_car_world.launch
source ./devel/setup.bash
roslaunch urdf02_gazebo deamo03_car_world.launch运行rviz
roslaunch urdf02_gazebo deamo04_sensors.launch运行一个键盘控制程序
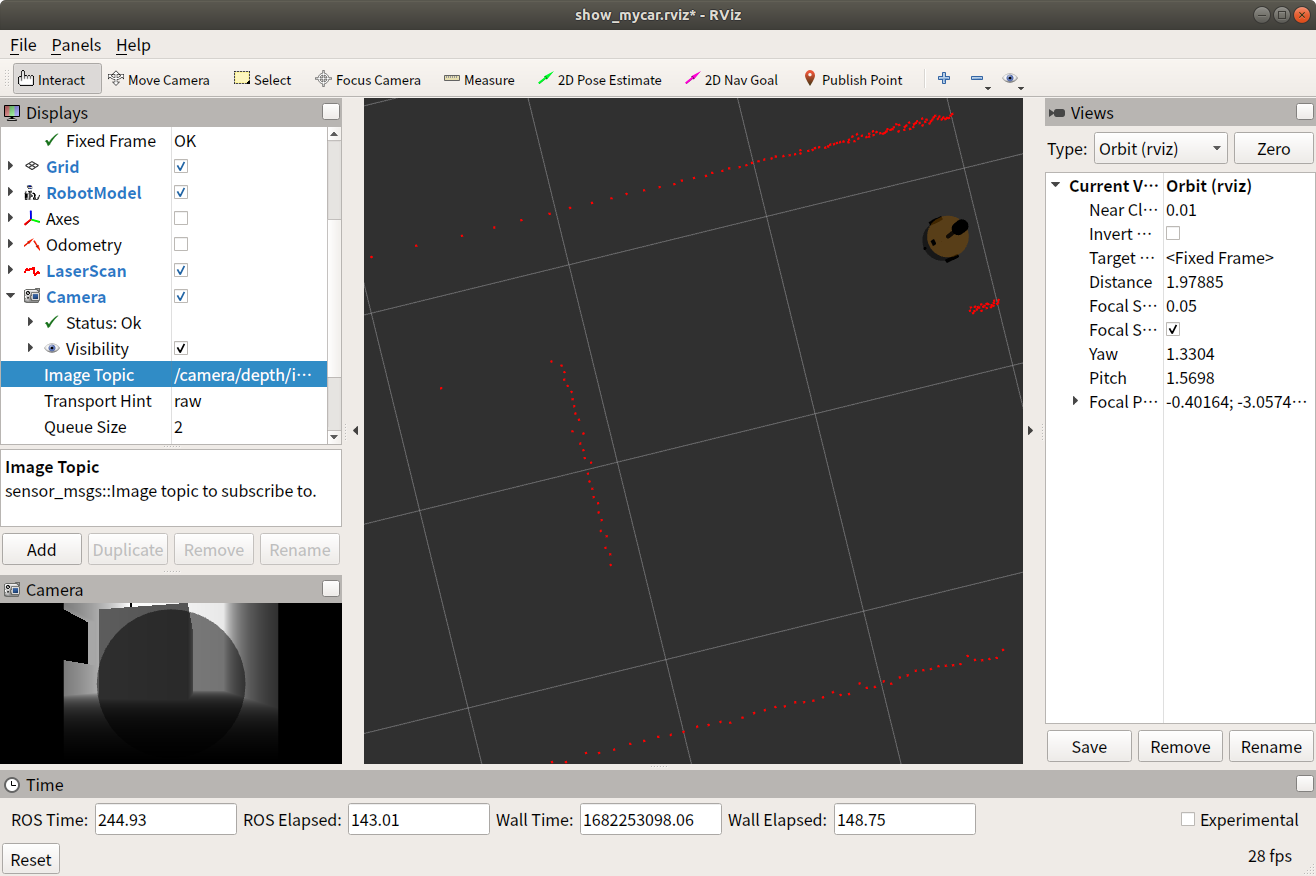
rosrun teleop_twist_keyboard teleop_twist_keyboard.py 打开rviz以后,新建一个摄像头的显示插件


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









