






 本文详细介绍了在Windows环境下使用VirtualBox安装Ubuntu 16.04虚拟机的过程,旨在为学习ROS Kinetic版本提供环境准备。文章覆盖了从安装VirtualBox到调整系统分辨率的每一步骤。
本文详细介绍了在Windows环境下使用VirtualBox安装Ubuntu 16.04虚拟机的过程,旨在为学习ROS Kinetic版本提供环境准备。文章覆盖了从安装VirtualBox到调整系统分辨率的每一步骤。
学习ROS,在windows下安装VirtualBox虚拟机和Ubuntu系统。
选择虚拟机原因,出错了恢复系统比较省心
选择VirtualBox原因,免费,安装包小只有100M
选择Ubuntu16.04原因,学习ROS的Kinetic版本
一、安装VirtualBox
过程比较简单,按照指示操作。
二、新建虚拟机
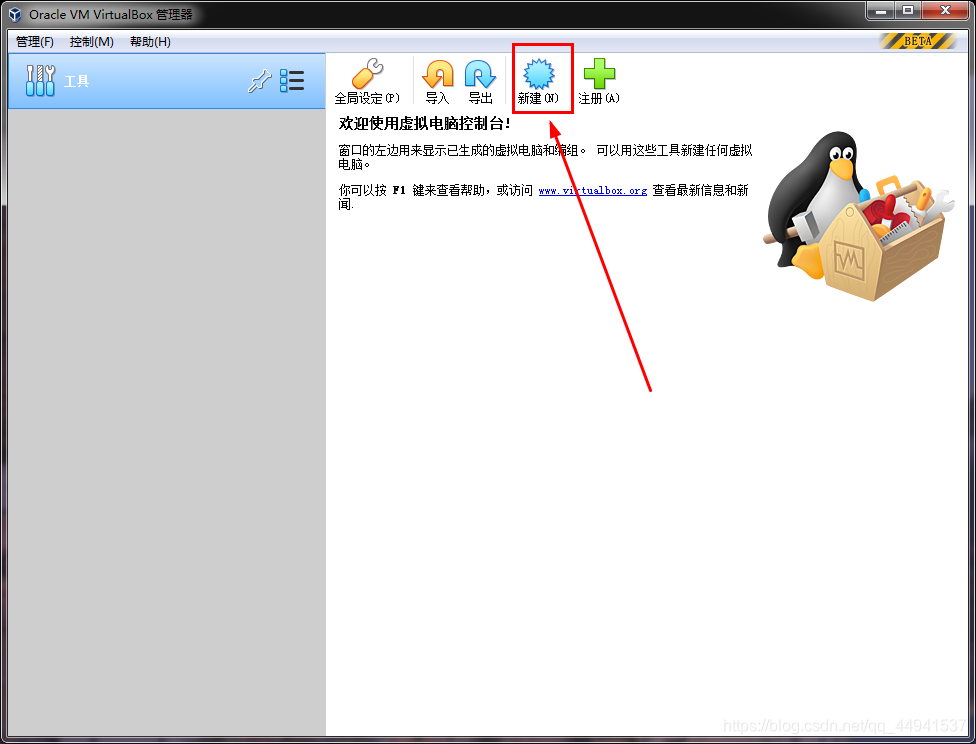
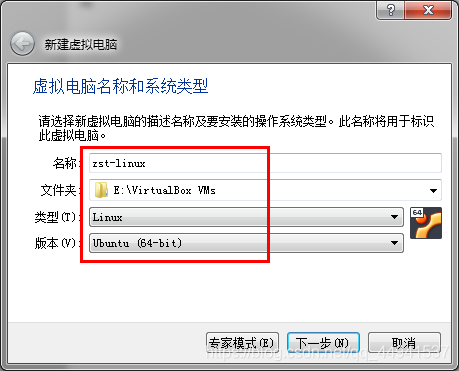
1,点击新建,设置名称和路径。根据系统和Ubuntu版本,选择Linux和Ubuntu(64-bit)
2,设置内存和硬盘大小
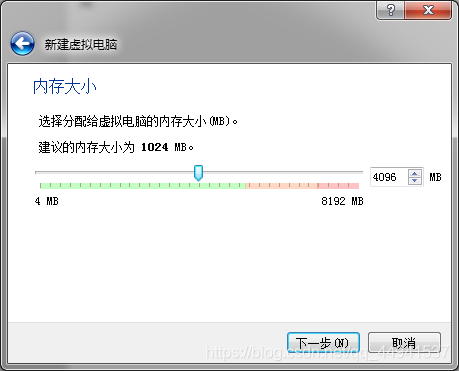

注意:内存和硬盘大小不要设置小了,后期会很麻烦,硬盘设置10G以上,此处设置60G。
三、安装Ubuntu系统
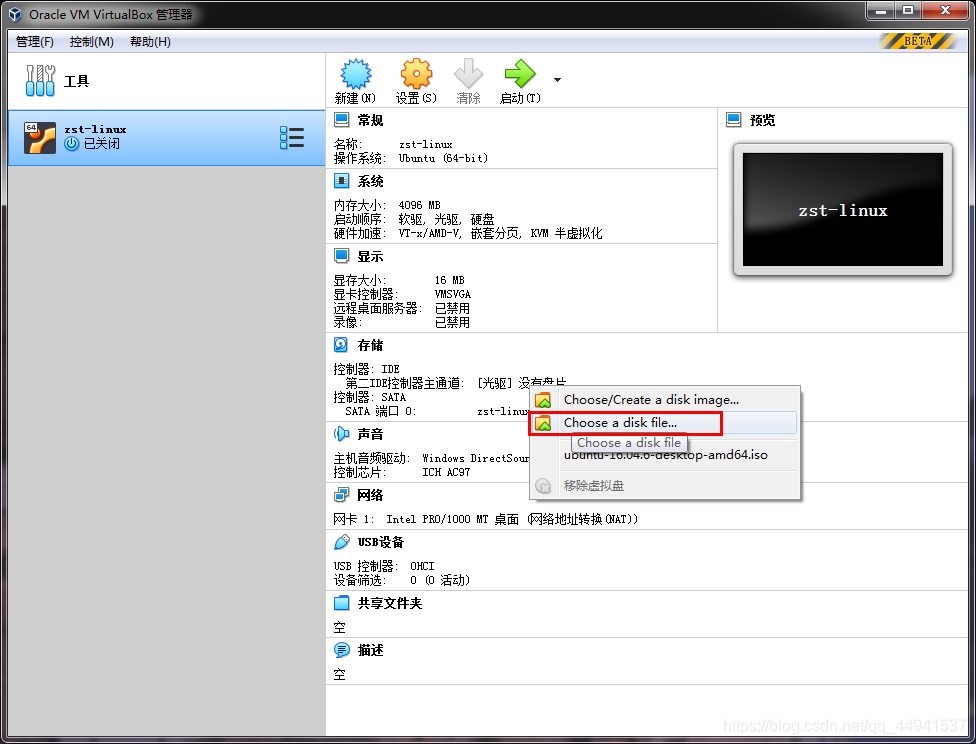
1,加载Ubuntu虚拟光驱

在刚刚创建的系统上,选择光驱路径。
2,安装Ubuntu系统
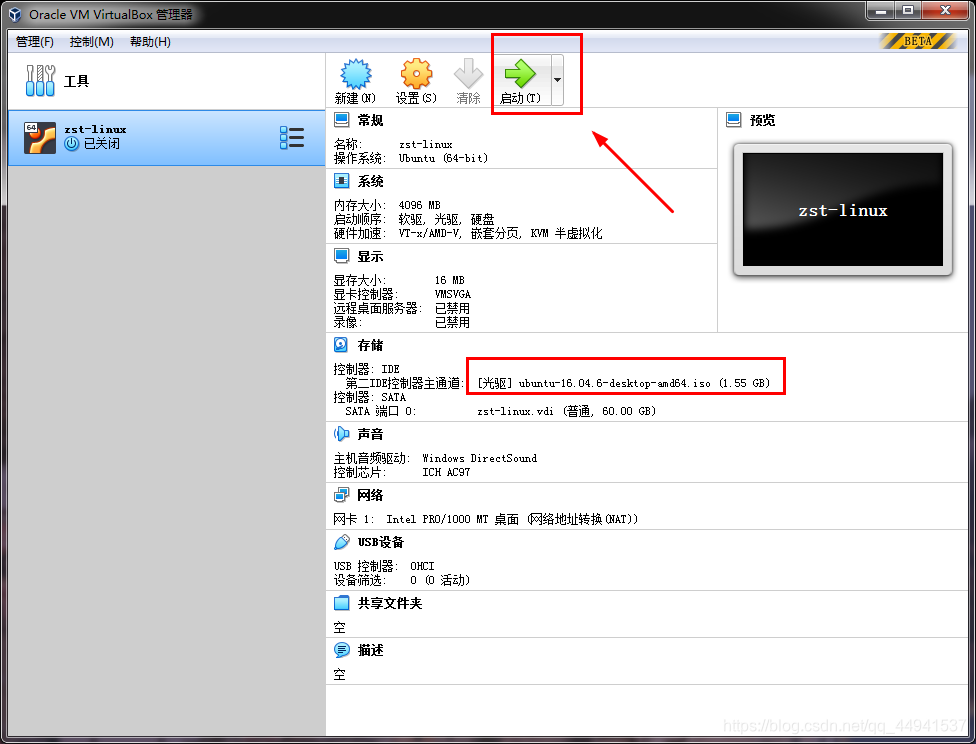
加载虚拟光驱后,点击启动按钮,进入安装

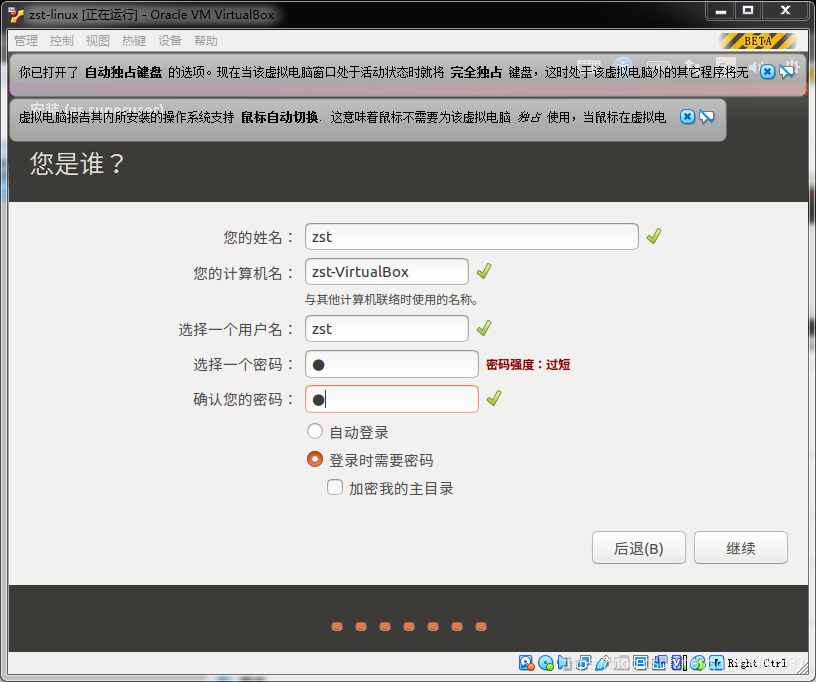
注意需要设置一个密码,获得权限必要。建议简单即可,后续方便。
按照提示安装,等待一段时间即可完成,
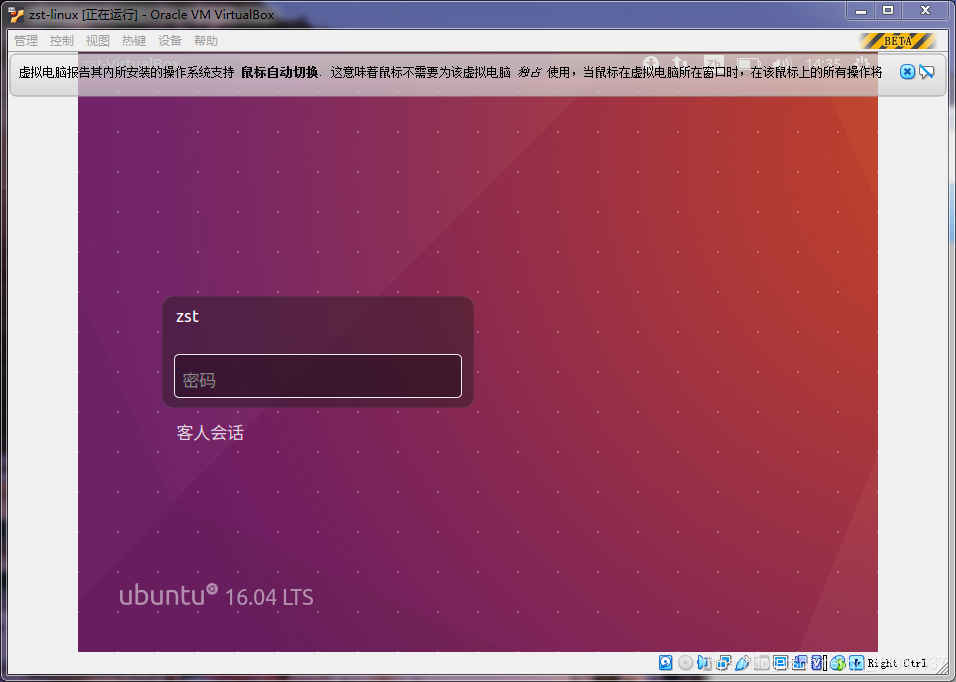
完成安装,输入密码进入。
四、修改系统分辨率
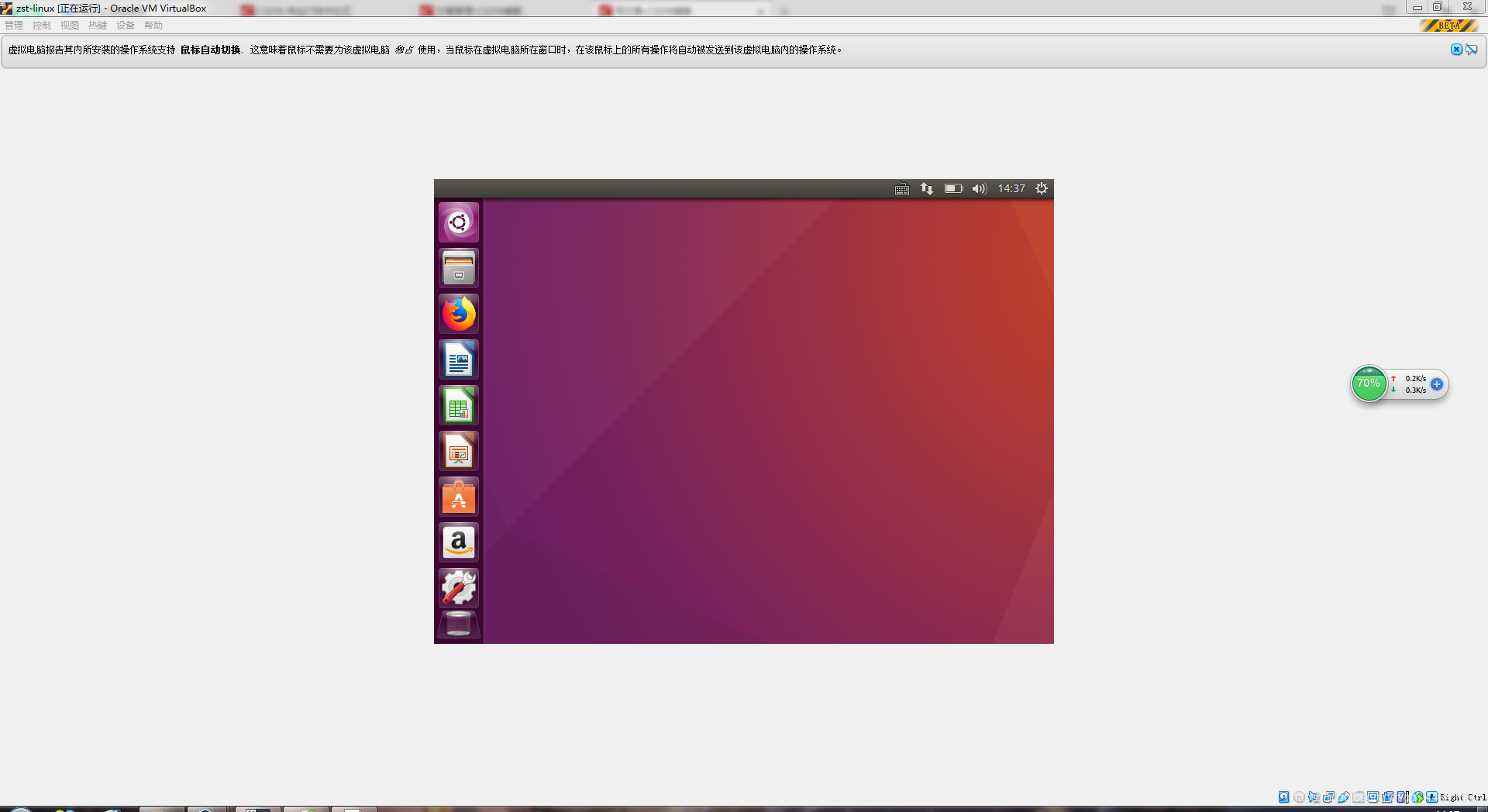
如上图,安装完成后,虚拟机里显示的大小不正确,不能全屏显示。
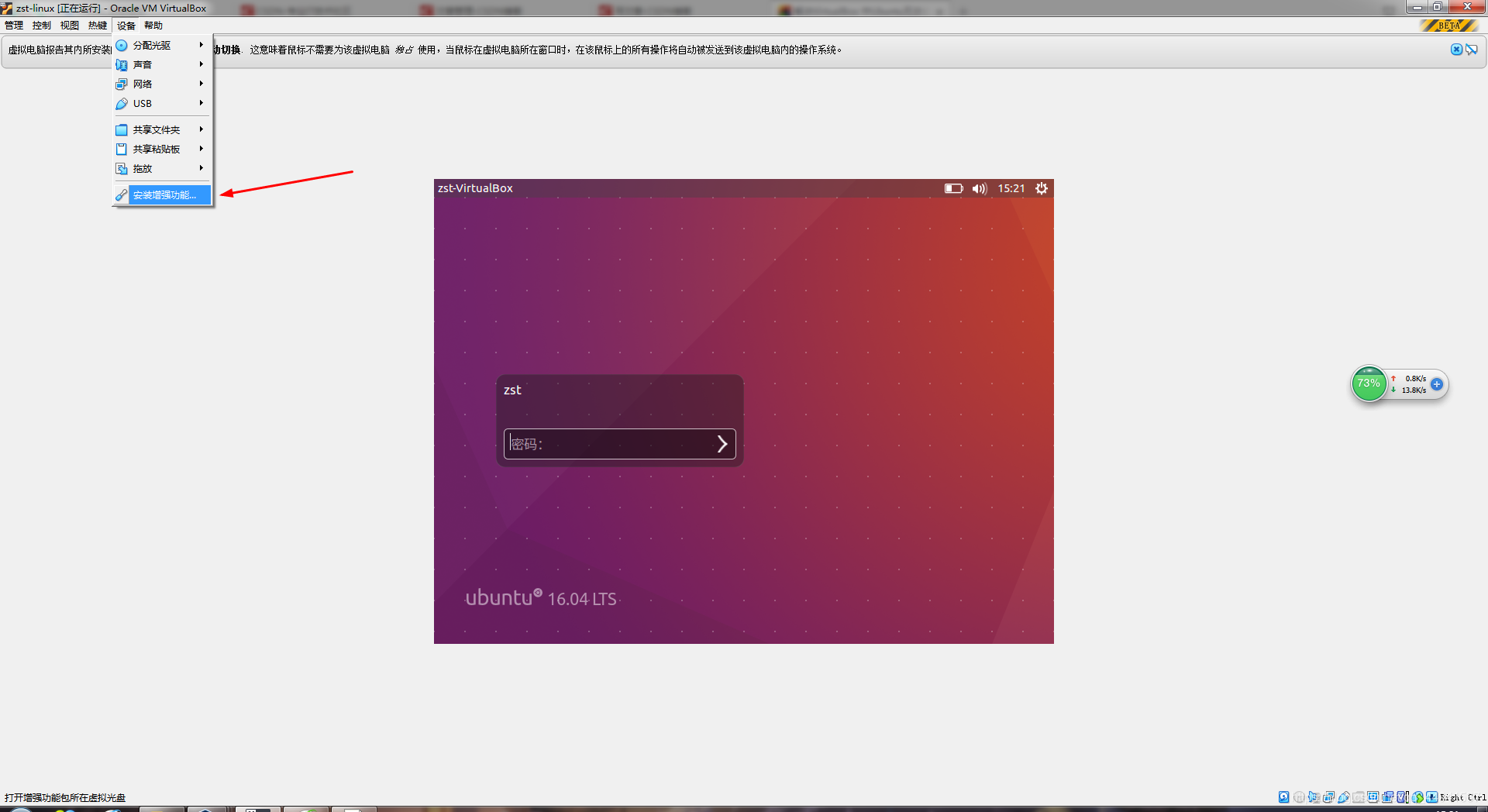
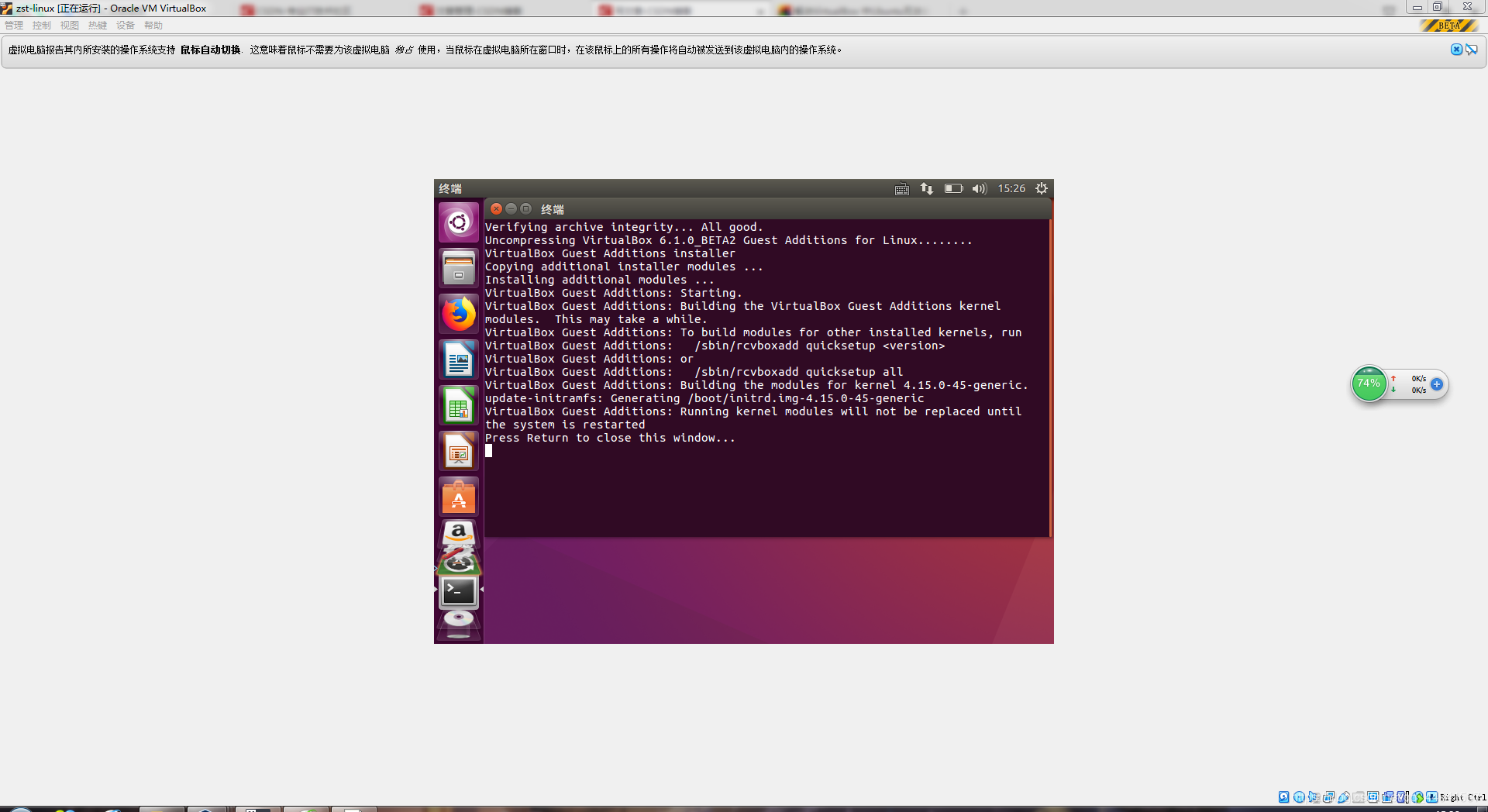
点击安装增强功能。
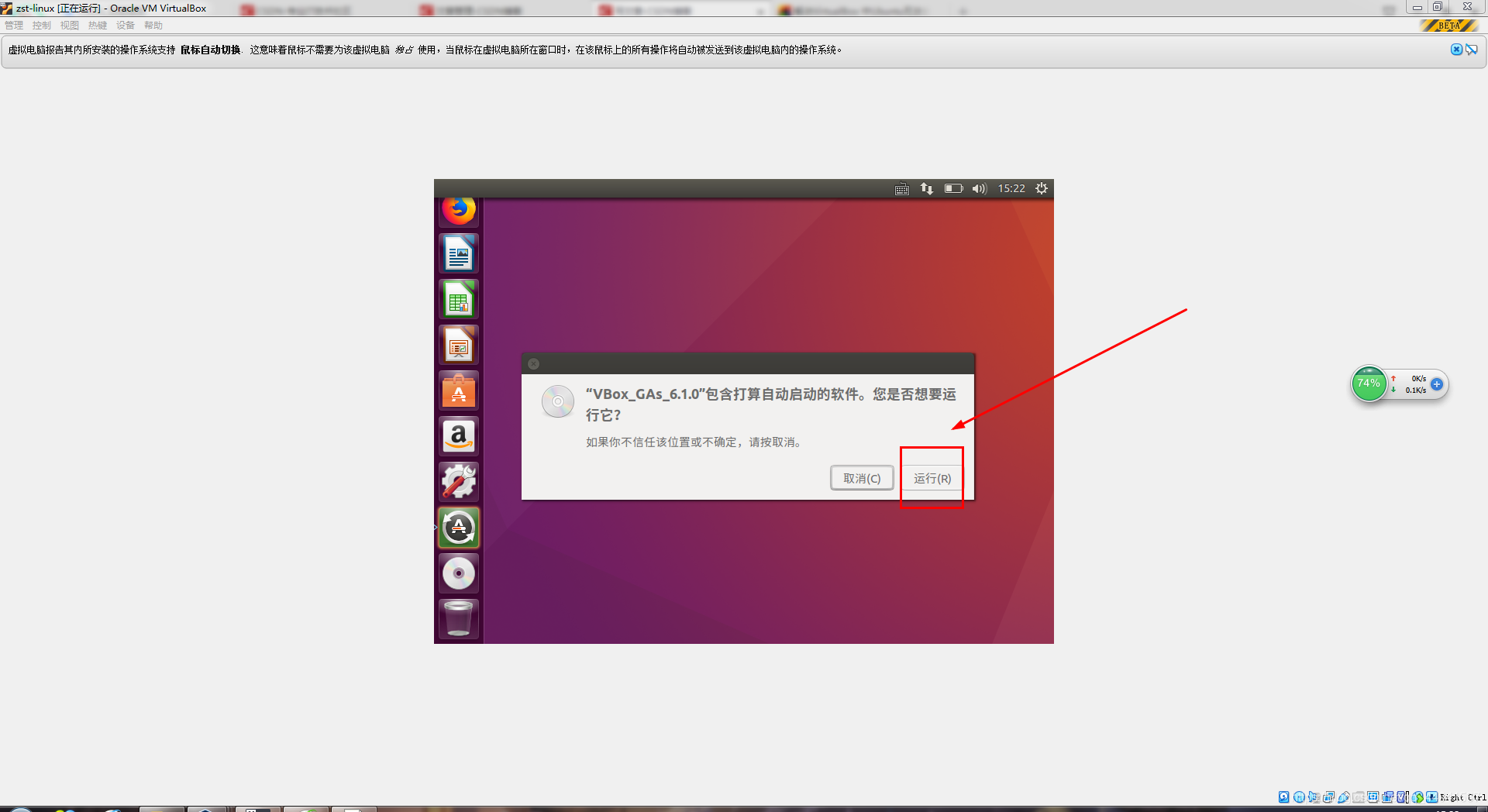
点击确定
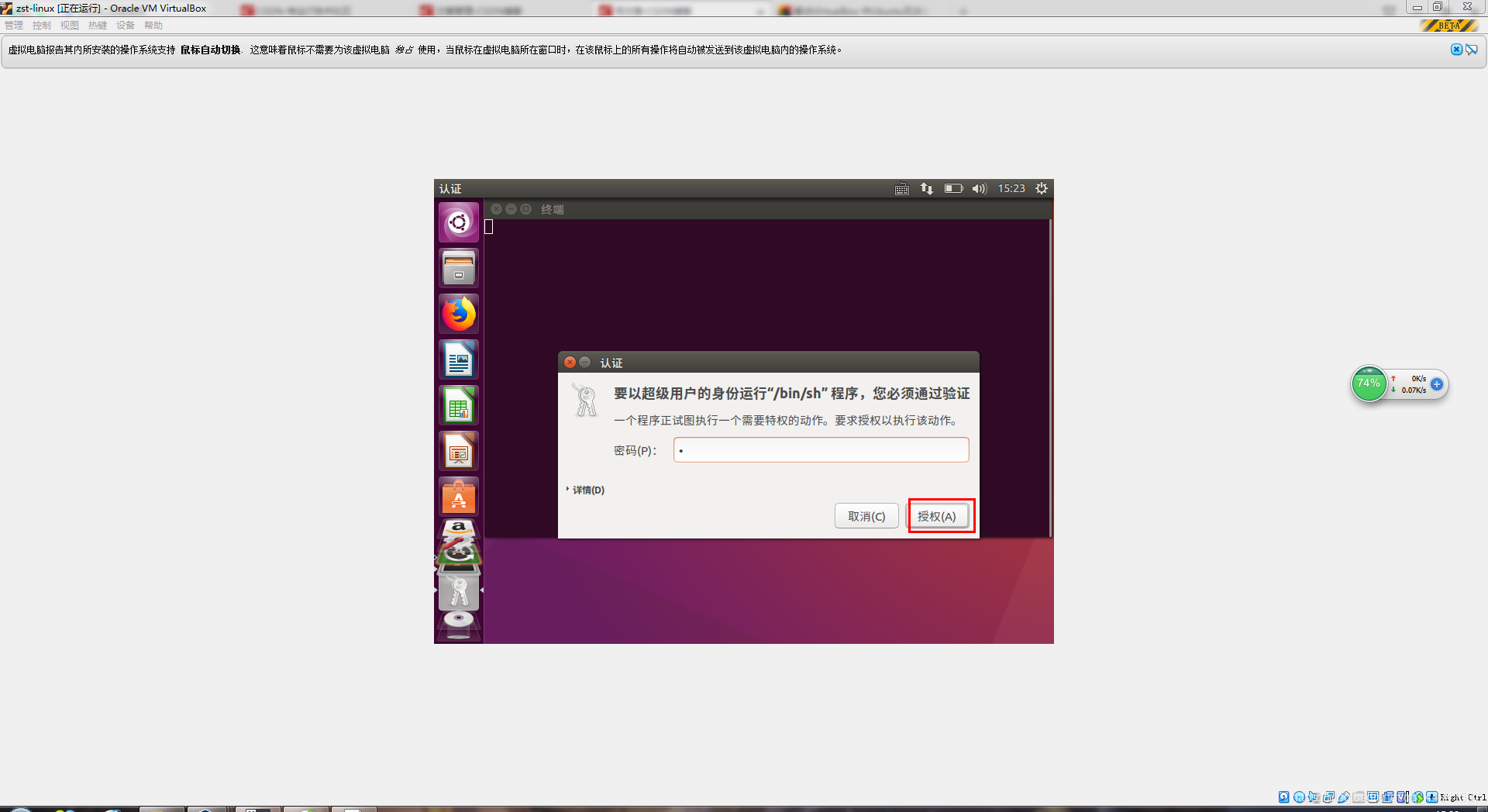
输入密码授权
安装完毕
可以将虚拟光驱弹出
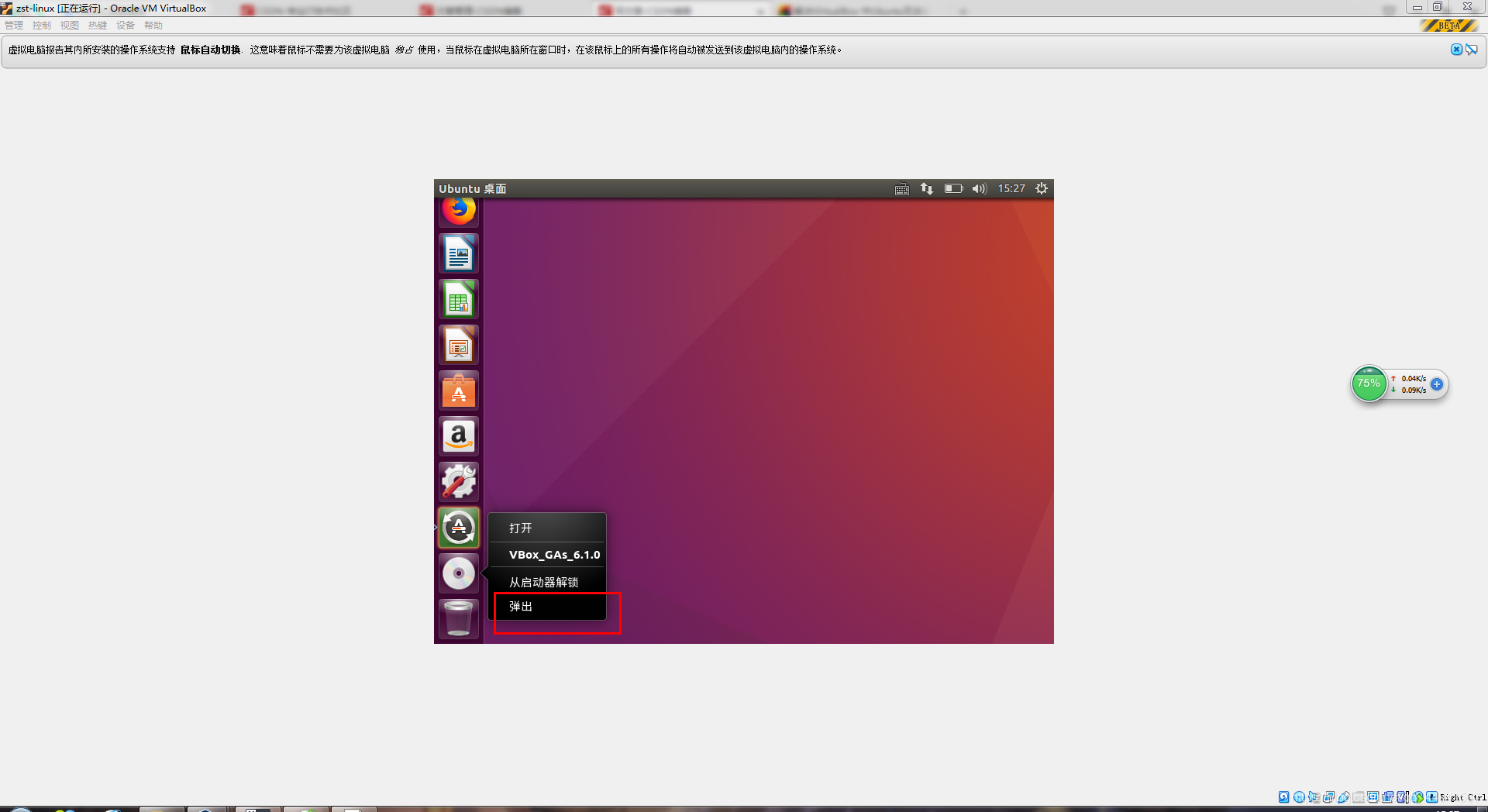
重启Ubuntu,即可恢复全屏


















 472
472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









