






1.概述
TPU(Time Processing Unit)是一个灵活的时间控制模块,可以用于实时处理输入识别、输出控制等应用。主要包含以下特征内容:
两套AFCB总线分别用于Host(CM7内核)和Engine(RISCV内核)来访问各自的外设
总共有32个通道channel,每个channel都有自己的一对输入输出信号,每个信号都能产生自己对应的触发输出信号和DMA请求信号
有两个24bit位宽的全局时基(TCR1 和 TCR2)用于channel的同步
支持特殊的EAC模式用于角度计数,可以自动记录角度数值(匀速模式 加速度模式 减速度模式)
支持Host(CM7内核)单独操作或者设置成Flexcore模式(Host & Engine)下工作
支持HSR & HSA功能,用于CM7和RISCV之间进行信息交流和中断通知
2.系统架构介绍(基于flexcore模式)
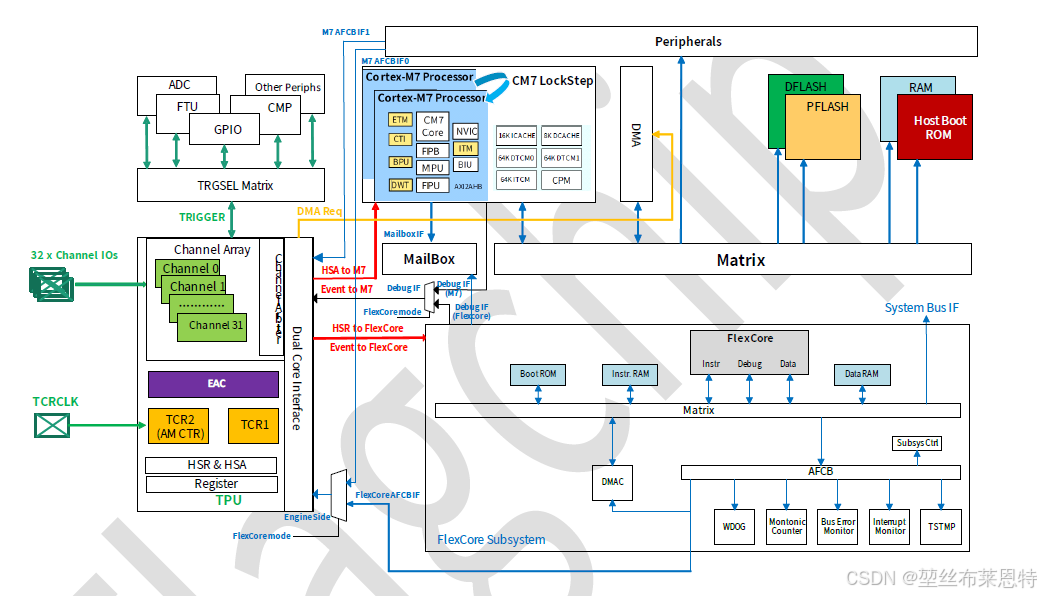
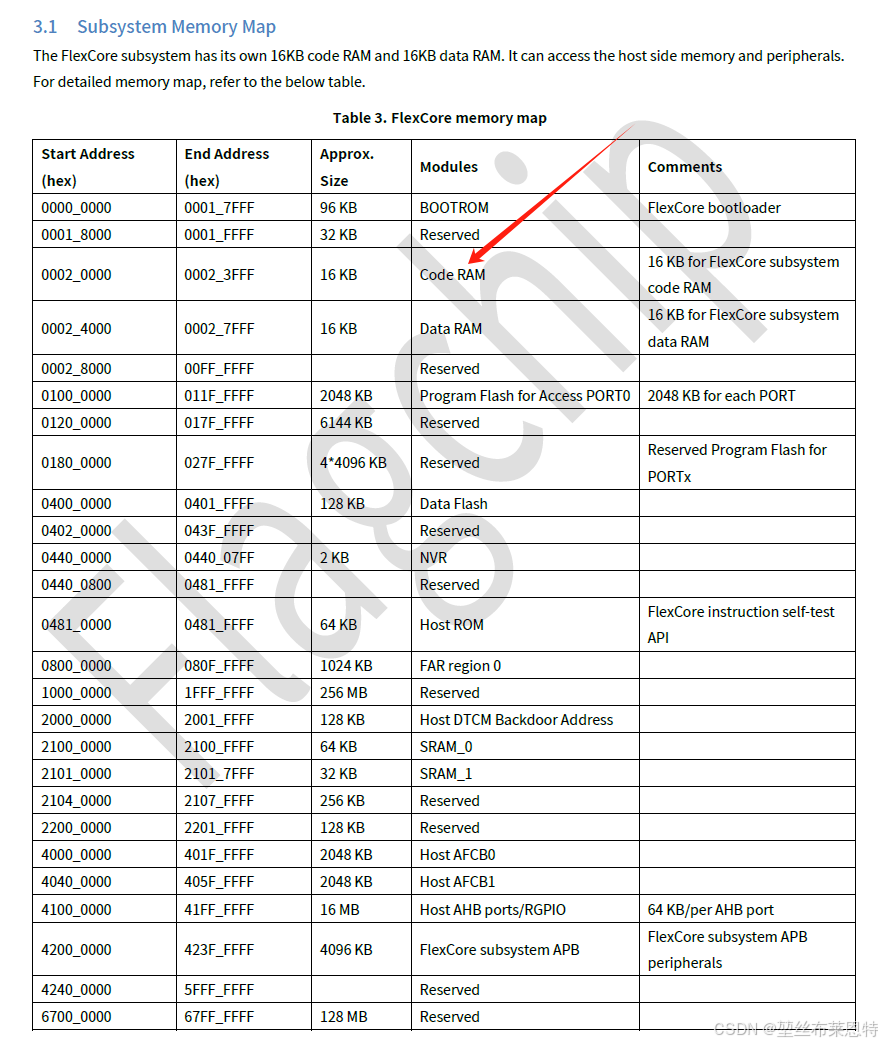
由上图可以看到,框架中有两套外设总线(AFCB)都可以访问TPU外设;RISCV核可以访问的前提是使能了Flexcore模式;在Flexcore模式下,CM7和RISCV都可以通过系统总线访问flash和sram,同时RISCV端有自己的16KB Ccode RAM和16KB Data RAM;除了FC7240芯片本身固有的Mailbox机制外,新增了HSR&HSA机制来进行核间通信,我们会在下面的章节来介绍这种通信机制;同时可以看到有两个调试接口,实际开发中旗芯微支持使用opnocd调试接口来调试RISCV端,接下来我们介绍flexcore模式的使能,也就是TPU外设使用前的准备工作需要做哪些。
工作流程框图
2.1 使能flexcore模式
第一步就是需要将芯片配成成flexcore模式,这里我们需要做两步工作,首先需要在NVR里面配置使能位,然后需要在NVR里面配置flexcore执行程序的地址,这里的程序地址目的是后面boot流程需要将该地址的code copy到flexcore侧的code ram上。
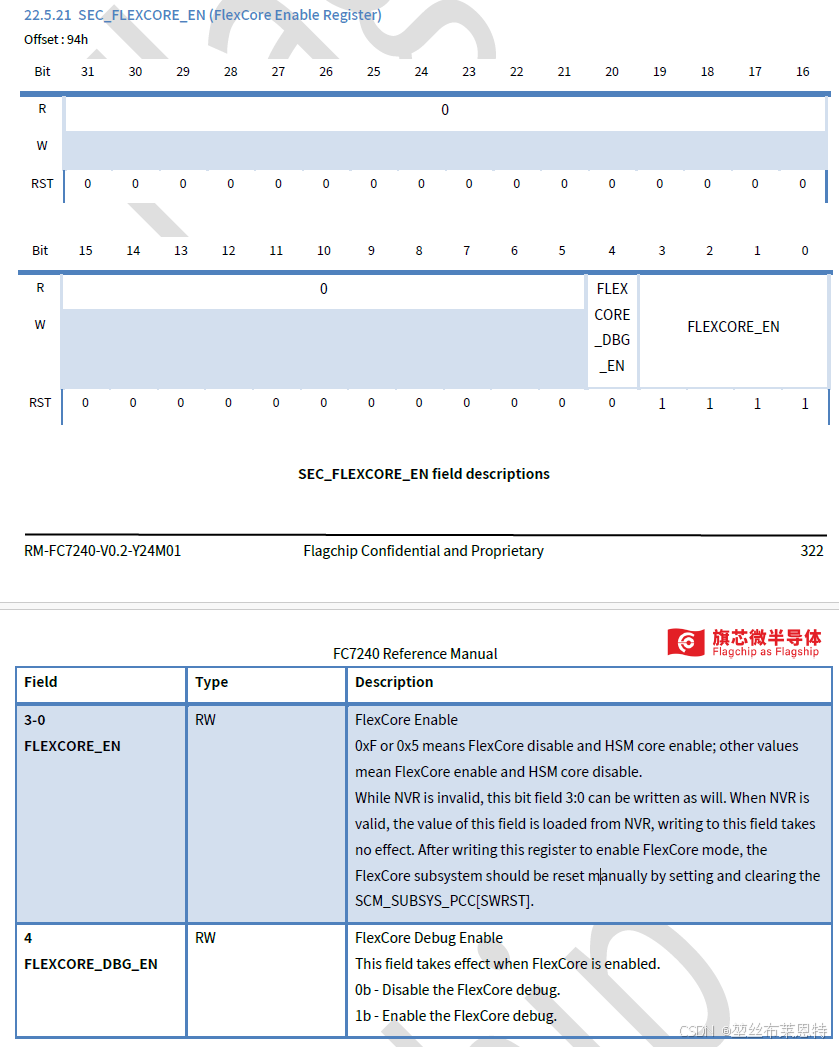
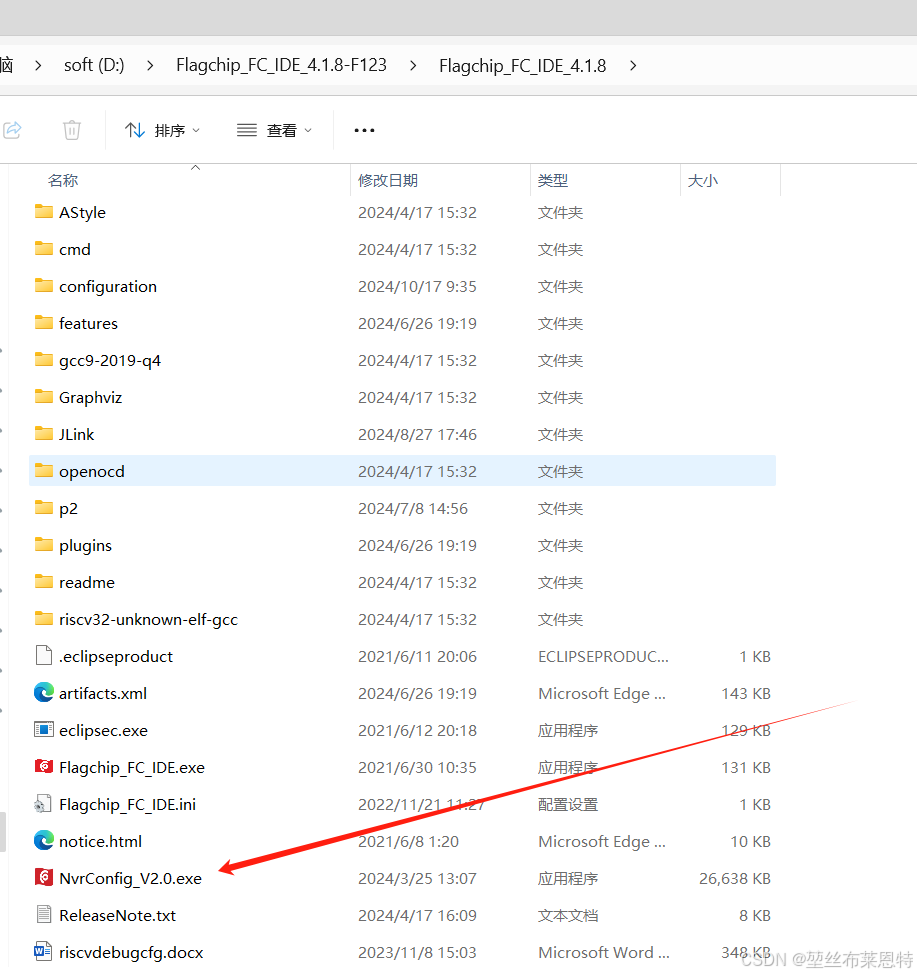
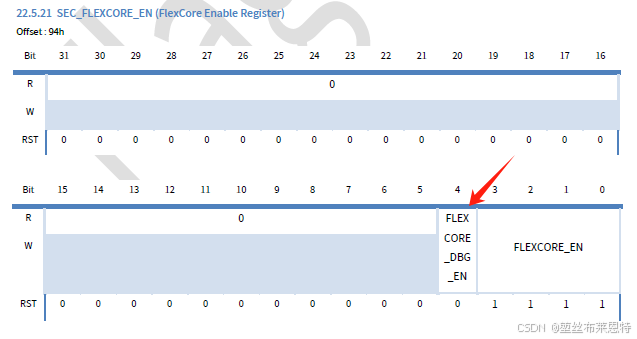
如上图所示,将bit0 - bit3配成非0x5和0xf的数据,即代表使能了flexcore模式,SEC寄存器的值都是通过NVR在上电之后加载过来的,所以我们一开始修改NVR的值也能达到效果,所以这里我们使用旗芯微软件团队开发的NvrConfig工具对该区域的数据进行修改,使用工具前我们需要将该工具存放在FCIDE目录下面,因为放在外面有时候不一定能找到JLINK的设备,如下图所示:
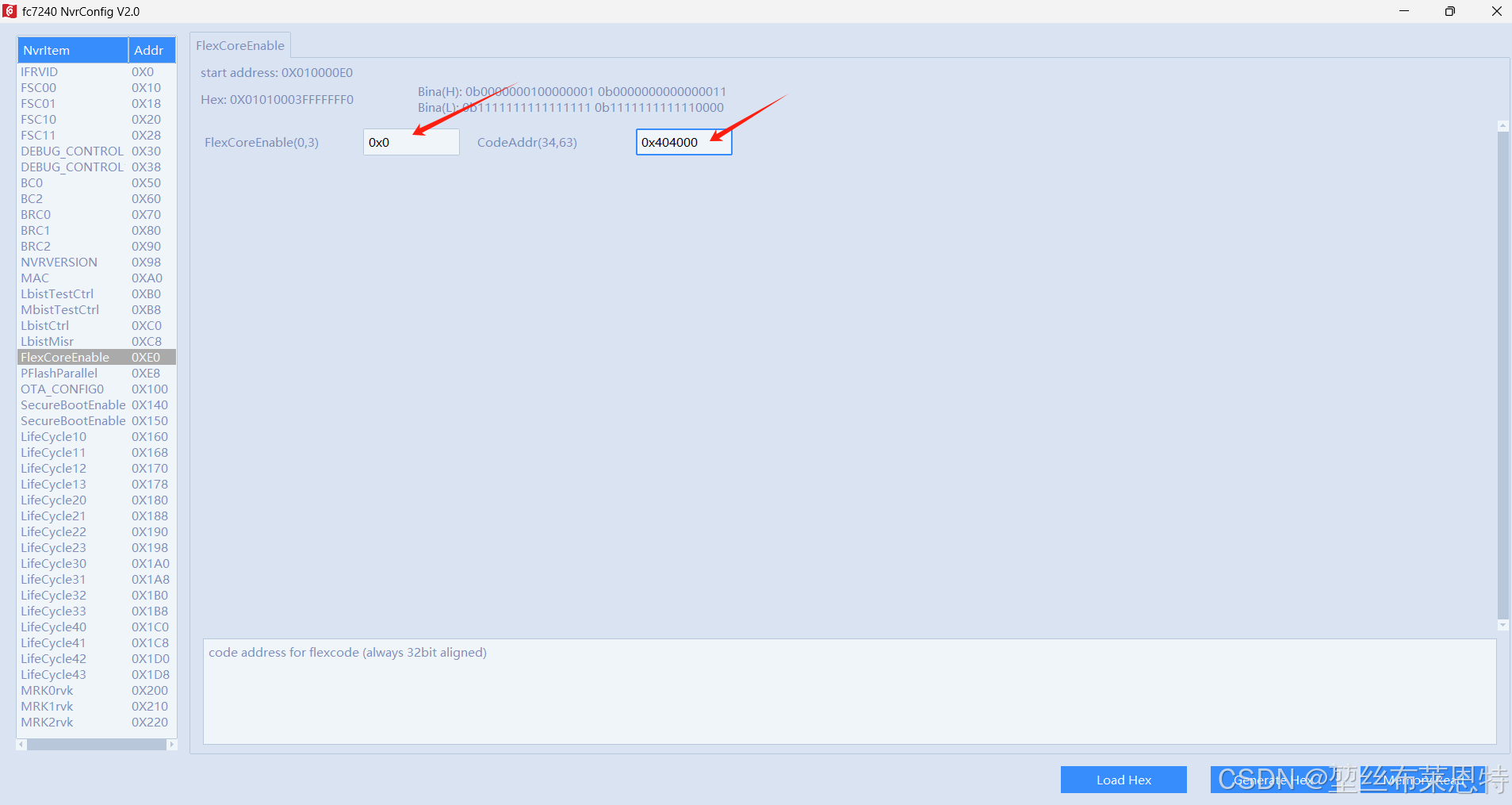
打开NVR配置工具,可以先读取芯片的默认NVR区域数据,如下图所示:
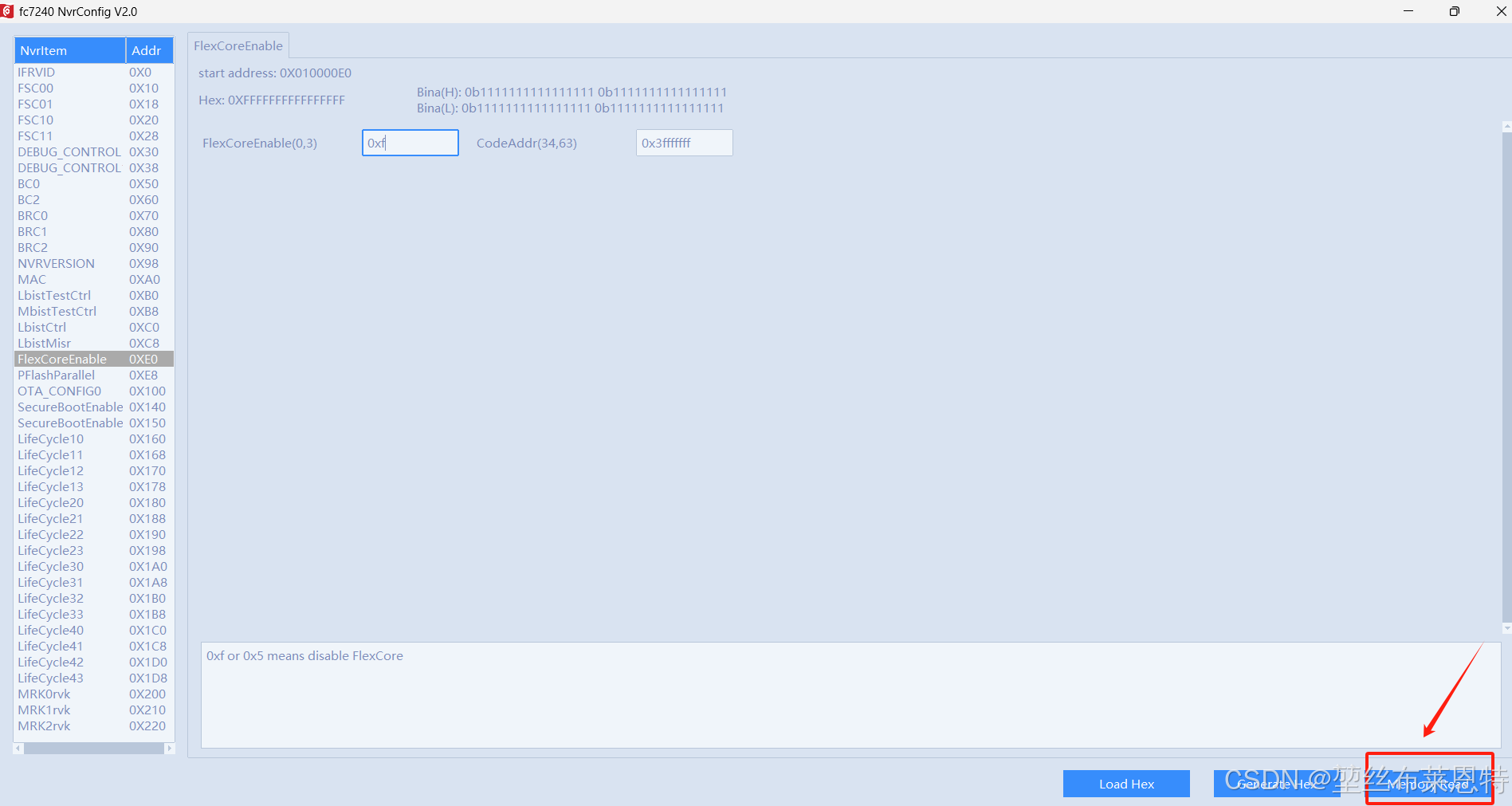
首先使能FlexcoreEnable写成0,CodeAddr写成0x404000,这里的0x404000是真实地址的高29位,所以实际代表的是0x404000 << 2 = 0x1010000;修改后的数据如下图所示:
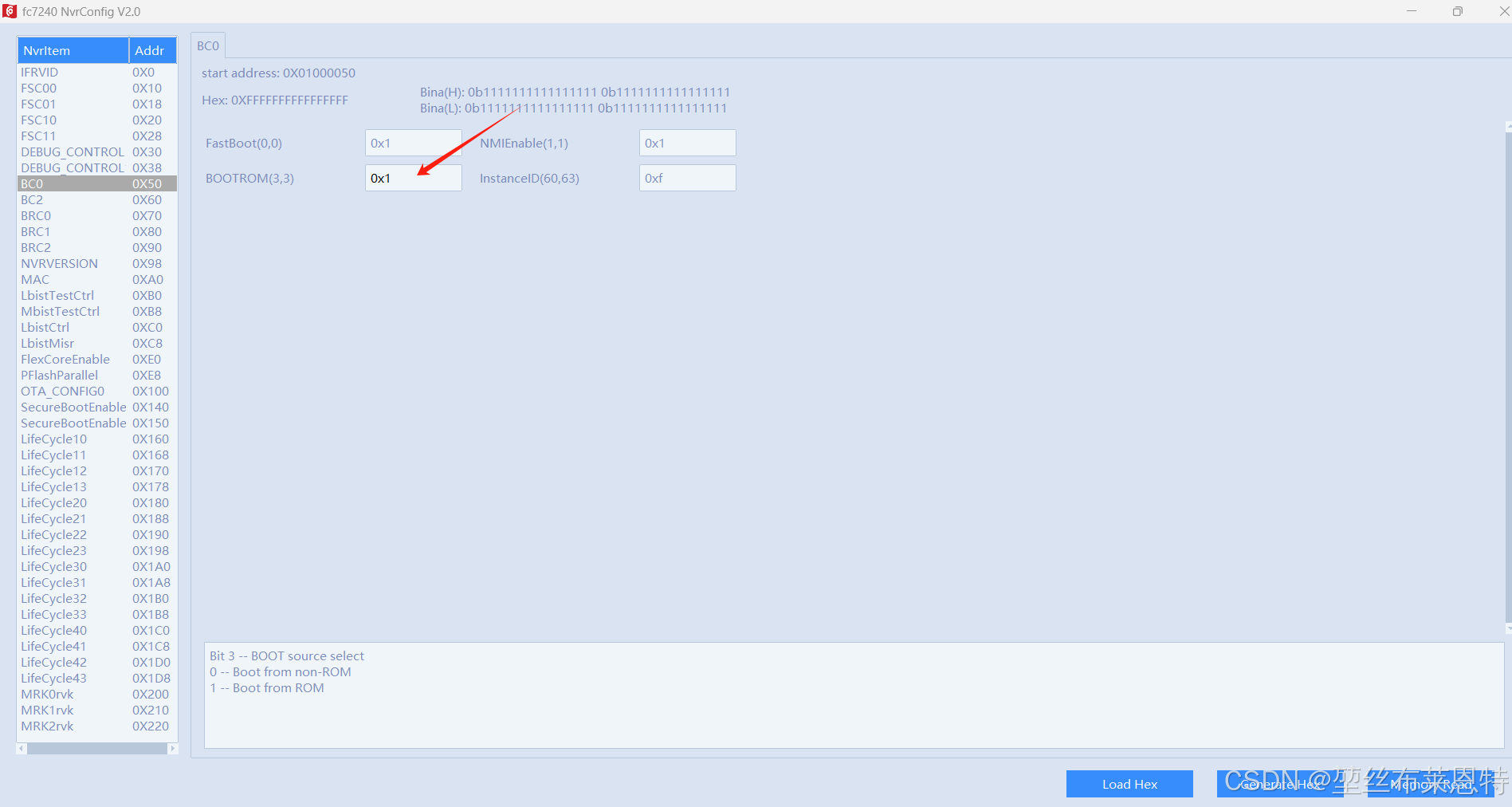
2.2 切换芯片启动模式从ROM开始
如图所示,将BOOTROM参数改成0x01,芯片上电后从ROM代码执行
2.3 如何烧录NVR的配置信息到芯片内部
方式一 直接通过配置工具的Gnerate Hex生成hex文件,然后点击Load Hex将hex文件烧录到芯片
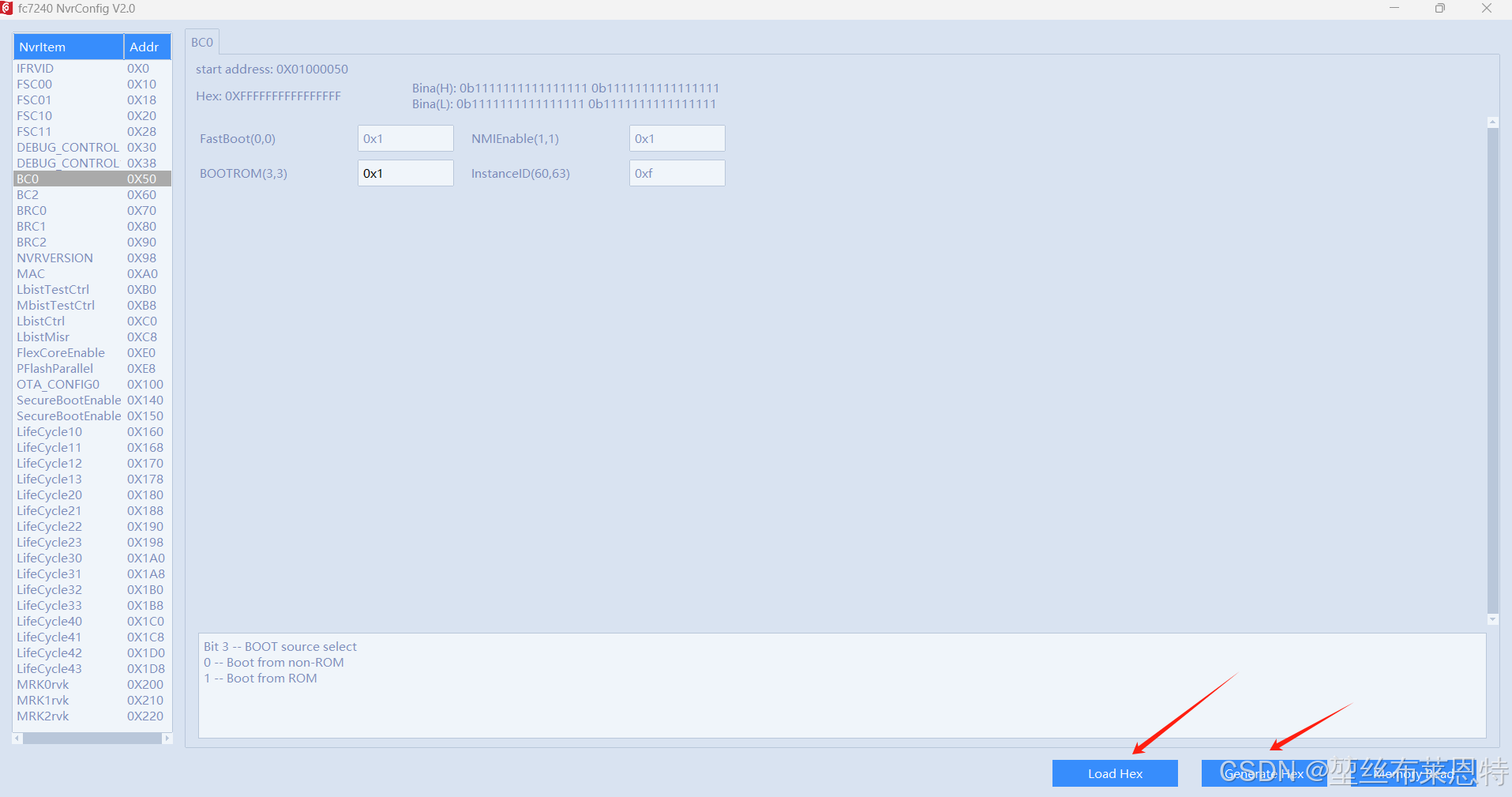
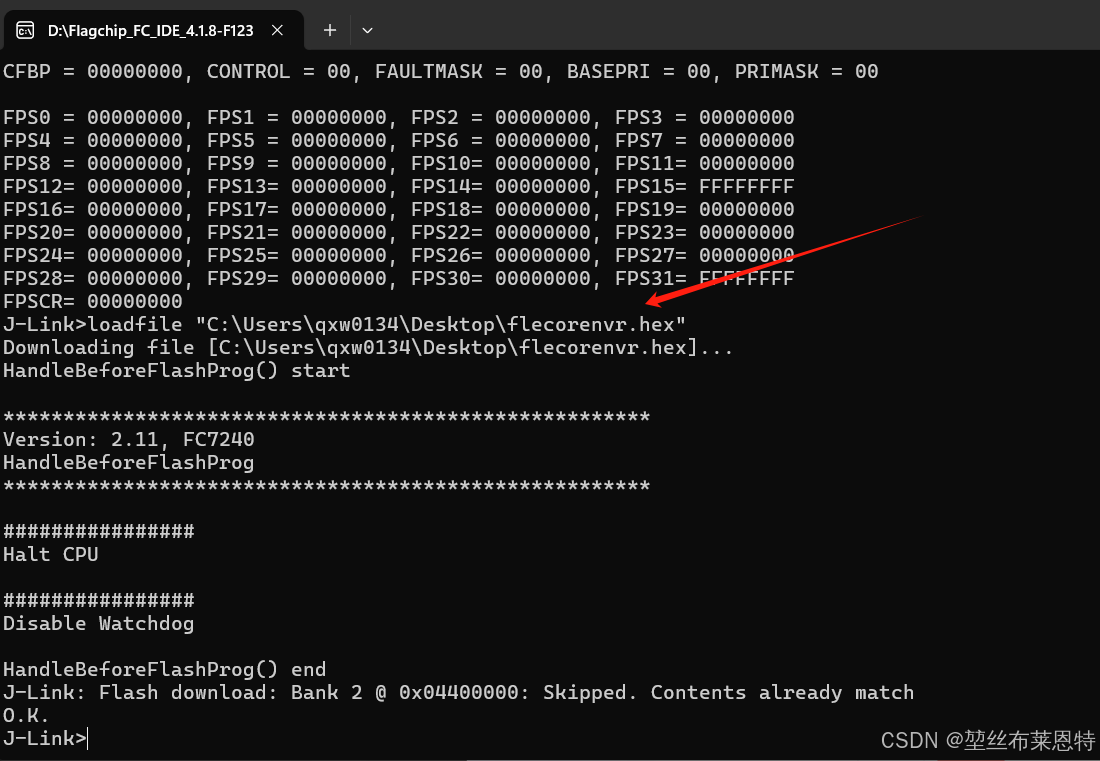
方式二 通过配置工具的Gnerate Hex生成hex文件,然后通过jlink.exe连接连接芯片,连接之后最好halt住CPU;通过loadfile指令将hex文件烧录到芯片里面。
2.4 Host侧和Engine侧的工程配置
2.4.1 Host侧配置
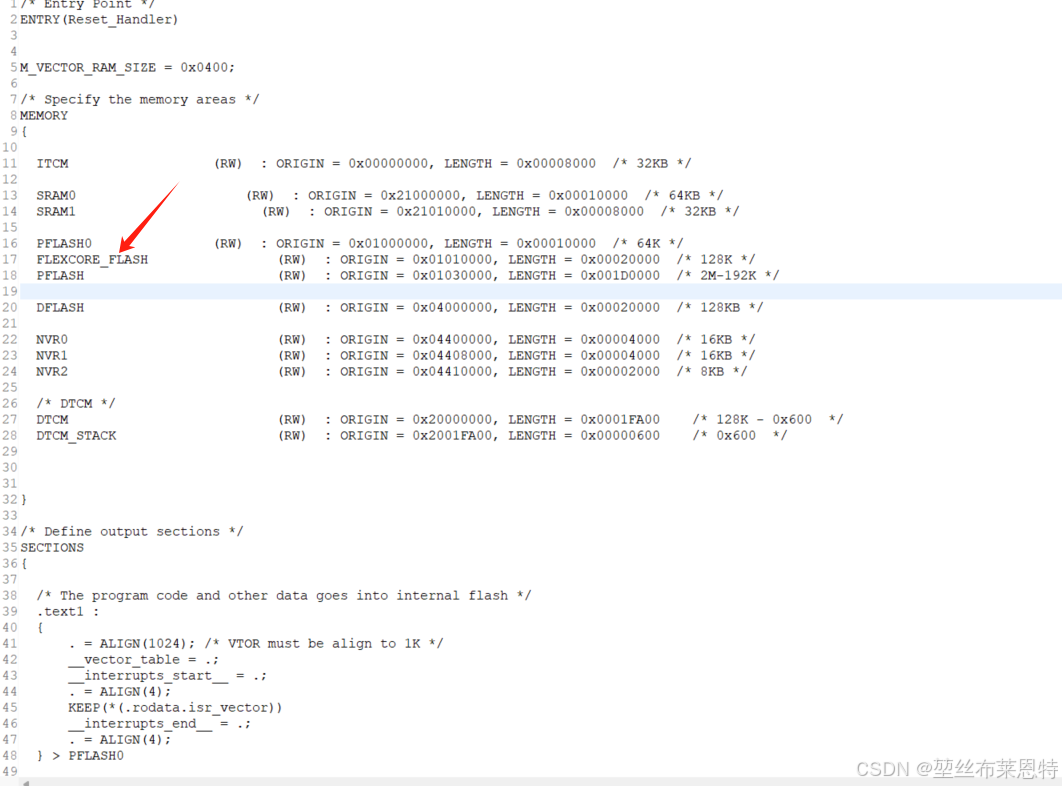
首先需要在host侧工程的链接文件里面预留Engine侧工程编出来的工程大小的flash,如下图所示,可以看到host侧的代码不会链接到FLEXCORE_FLASH定义的区域里面来,为Engine的工程预留了空间;同时可以看到这里FLEXCORE_FLASH这里定义的起始地址是0x1010000,和2.1章节里面我们配置的NVR区域里面flexcoreaddr的地址是一一对应的,这里需要读者注意,如果需要更改flexcoreaddr的地址,那么这里也请自行更改。
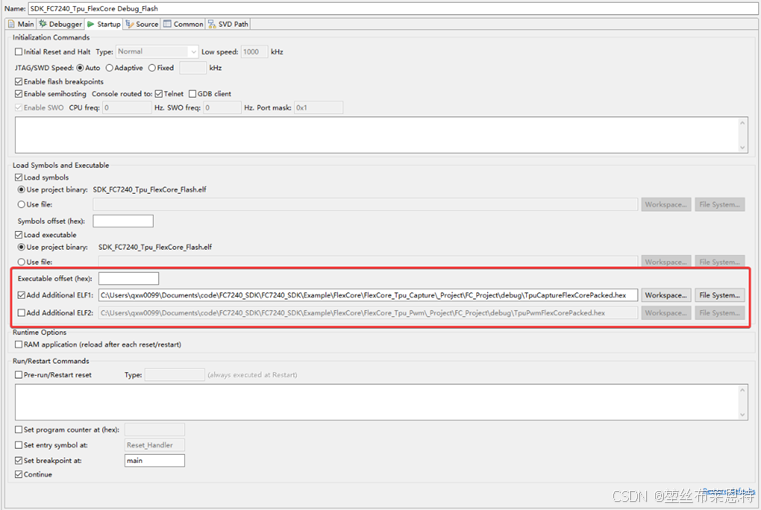
Host侧工程需要将自己和Engine侧的工程都下载到flash里面去,这里需要用到FCIDE的一个组合下载功能,可以看到这里flexcore端的hex工程名和真实的名称多了一个packed名词,这里是一个细节,我们会在Engine侧的配置来讲这个。通过以下配置就可以把两个工程下载到flash里面去。
2.4.2 Enigne侧配置
首先打开Engine侧工程的链接文件,我们可以看到这里的中断向量表被分配在了0x20000的位置上,这个位置是flexcore侧的指令RAM地址,芯片上电执行ROM代码之后会把flexcore的代码从flash位置搬到RAM,说的也就是这里的RAM位置;所以如果想修改向量表地址的话,需要注意地址的范围需要在RAM里面
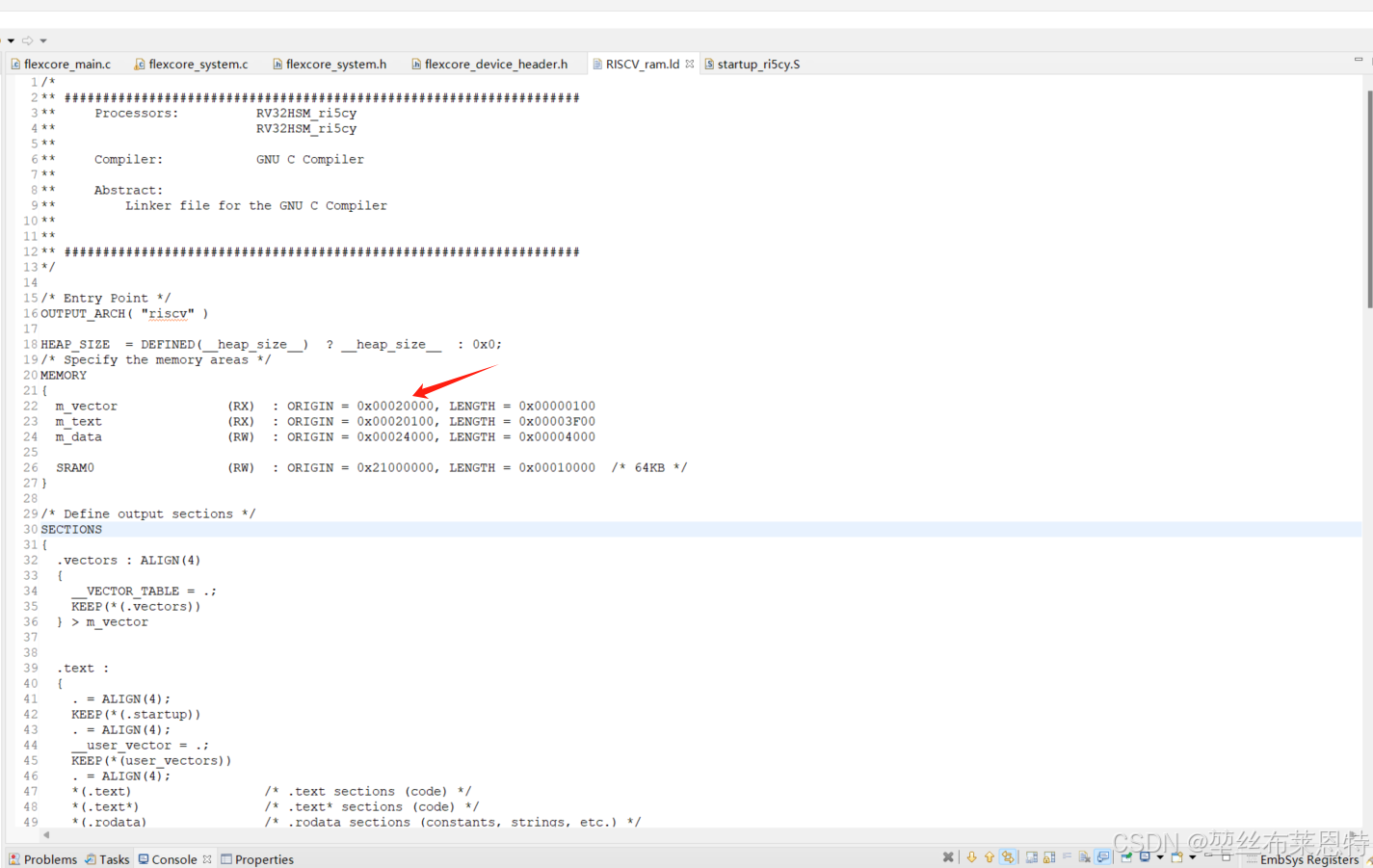
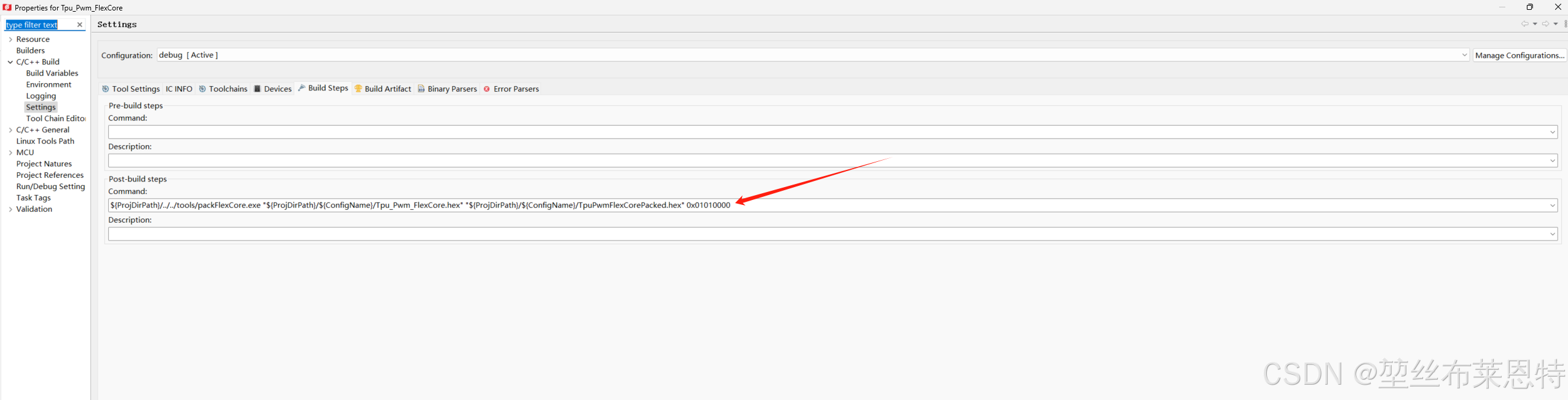
还记得2.4.1章节预留的一个伏笔吗,按照目前链接文件编译出来的hex文件的起始地址是0x20000;但是存放到flash地址应该是host侧和NVR区域配置的0x1010000,这里就需要在Engine侧的编译配置里面增加一个指令,如下图所示;这里生成的是名为TpuPwmFlexCorePacked.hex的文件,在host侧下载的时候用的是该文件
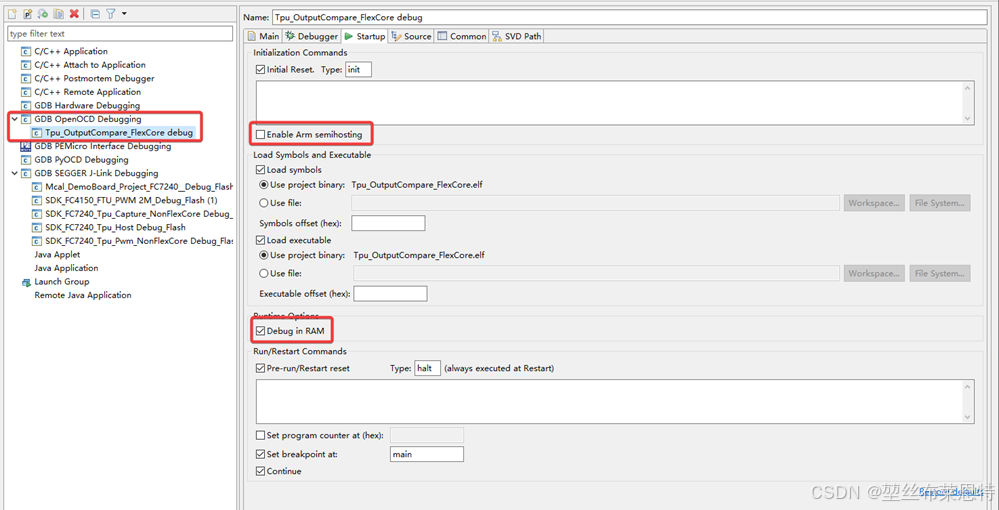
当然,上述提到的是flash下载的方式,如果是调试的话可以直接在RAM里面调试,通过debug串口选择openocd模式,具体配置方式如下图所示
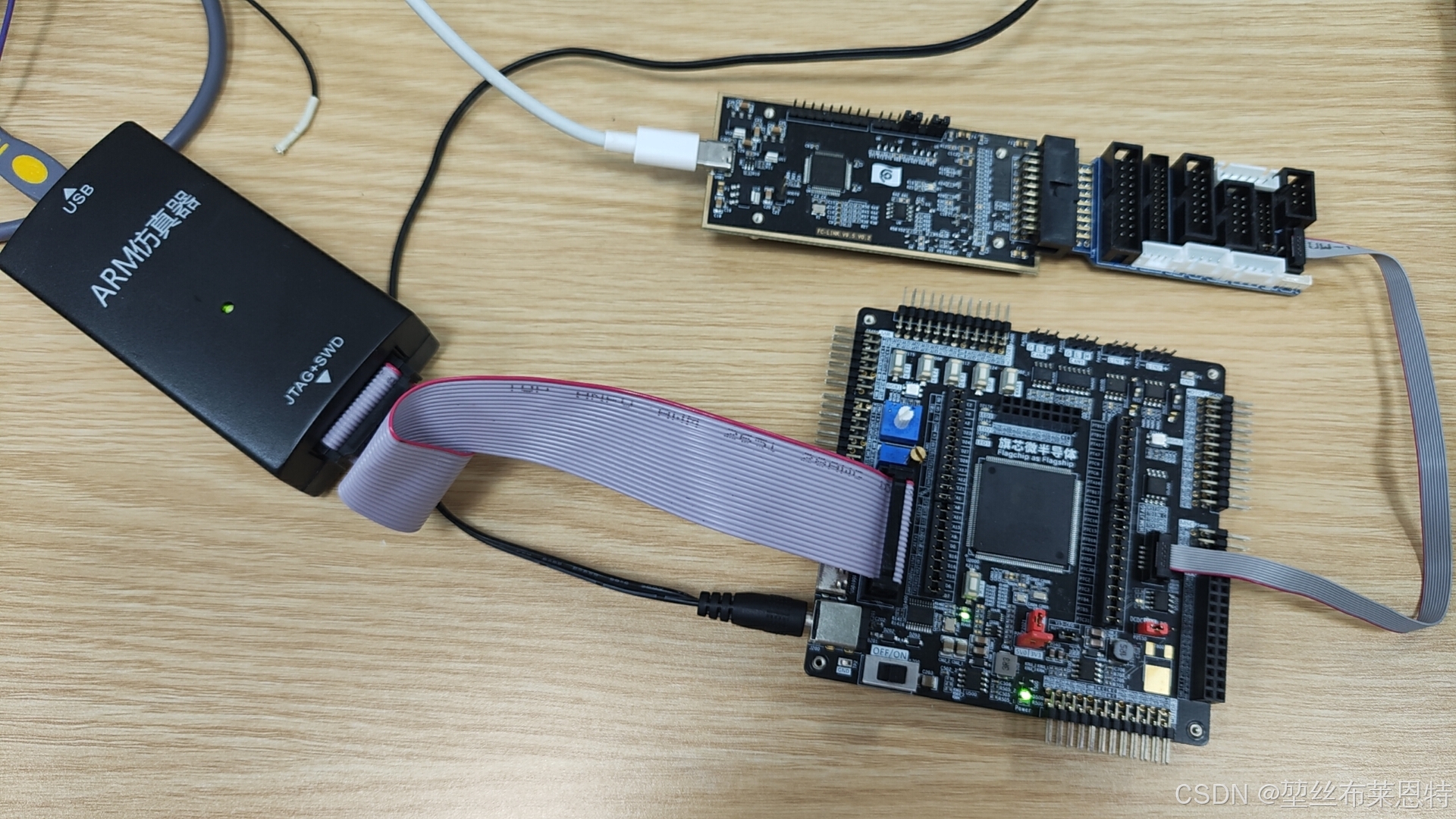
具体的调试接线如下图所示,左边的是JLINK负责调试CM7,上面的调试器是旗芯微自己开发的dap调试器:
3. 初始化配置
3.1 Host侧的初始化配置
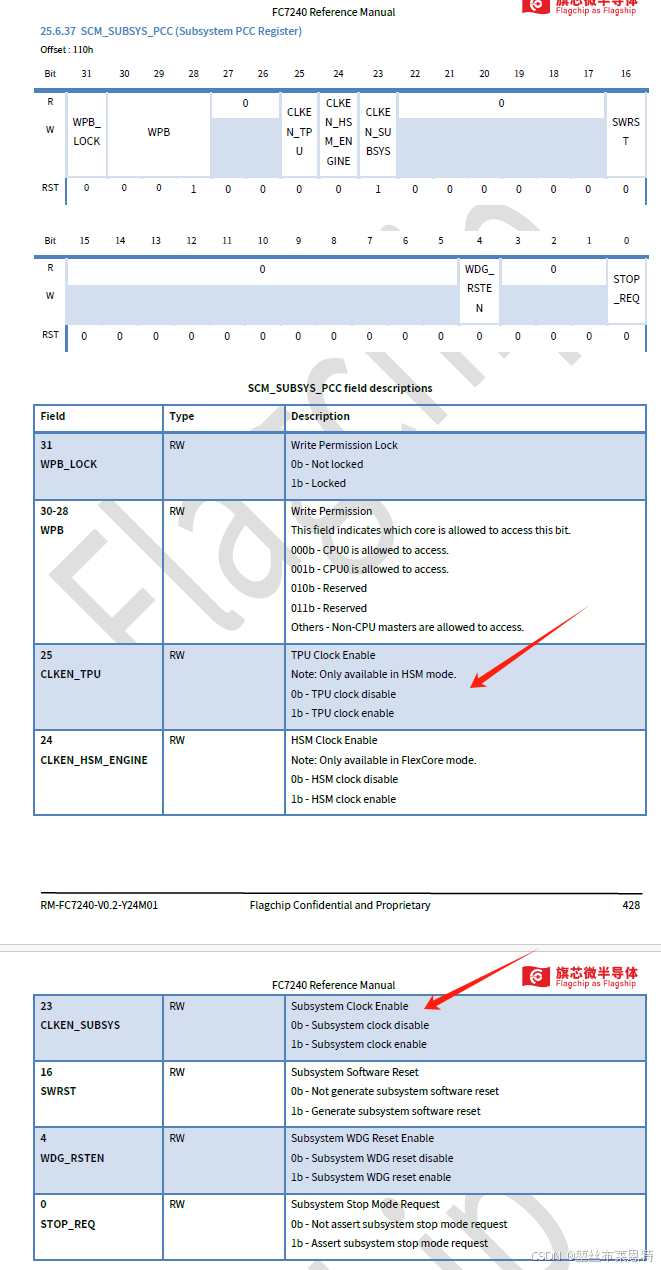
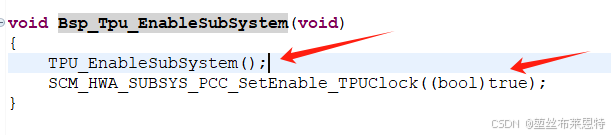
Host侧需要做两个操作,第一个是使能子系统,也就是激活flexcore;第二个就是打开TPU的时钟;
代码如下所示:
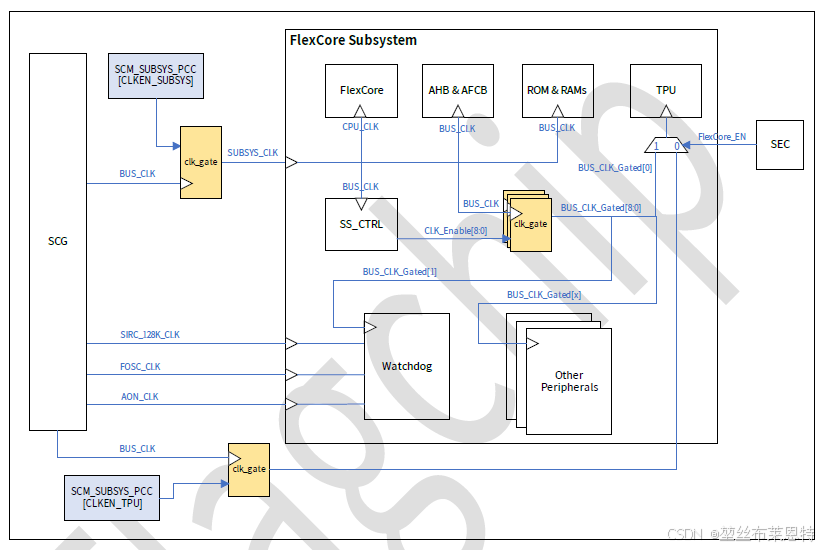
系统时钟框图对应如下图所示:
3.2 Engine侧的初始化配置
首先需要确认flexcore模式是否使能,使能了才能去操作TPU外设
volatile uint32_t *p = (volatile uint32_t *)0x40014094;
while (((*p) & 0x10) != 0x10);这里的0x40014094就是SEC寄存器里面flexcore是否使能的状态位
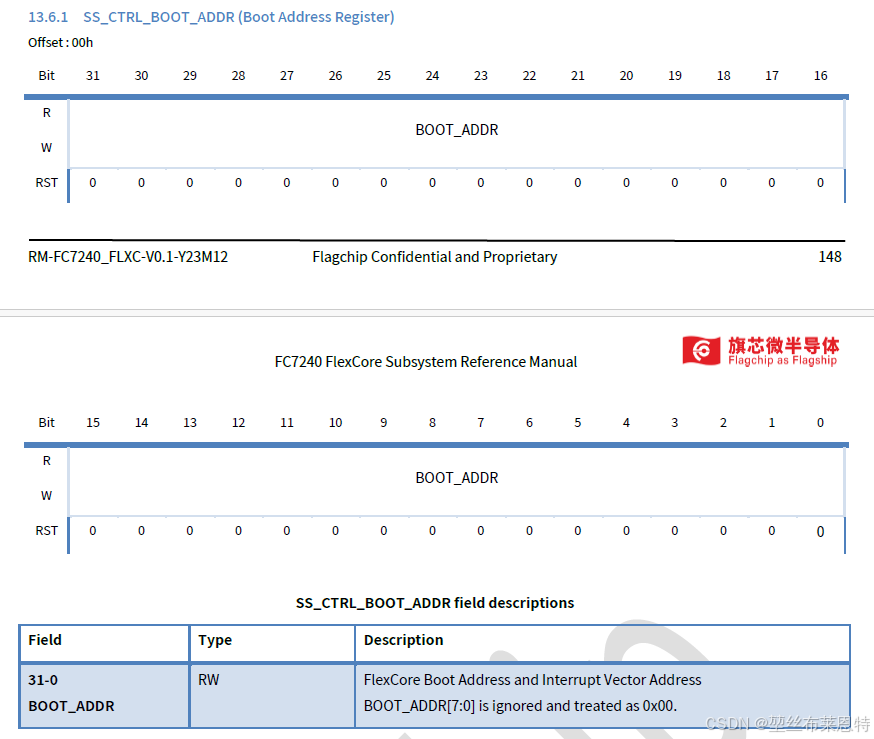
然后需要把向量表的地址给到SS_CTRL寄存器
SystemSetIsrTableAddrWithBoot(0x20000u);也就是把0x20000这个链接文件里面配置的地址给到SS_CTRL寄存器,低8位会忽略
最后需要在Engine侧打开TPU的时钟,如下图所示
SystemClockEnableSpecific(1u);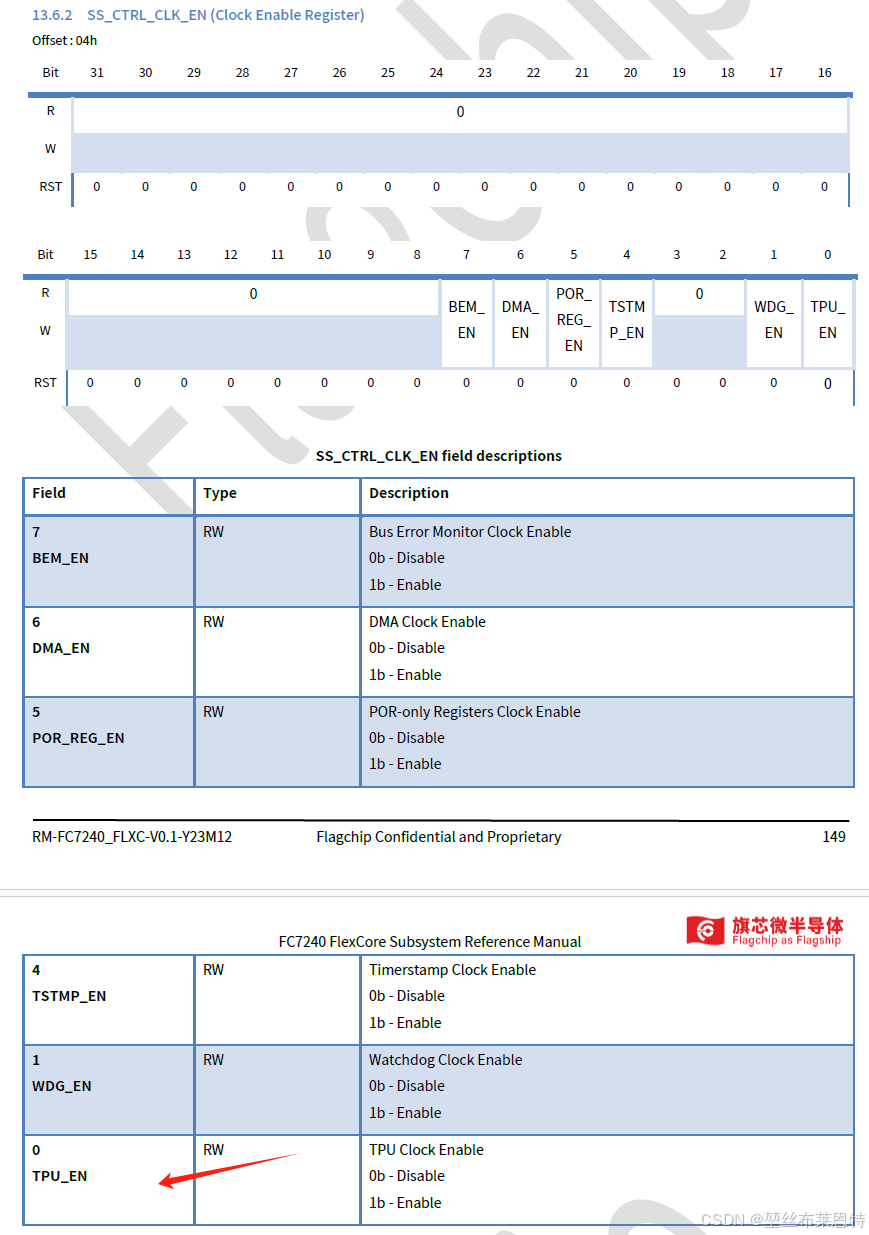
4 TPU功能简介
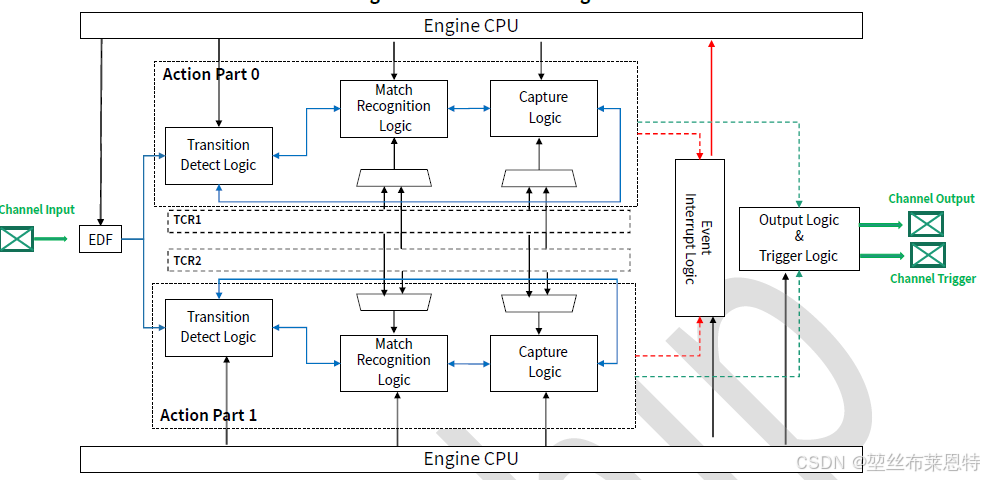
4.1 通道介绍
TPU总共有32个channel,每个通道都是双动作单元,具有输入检测,匹配检测和捕获的功能,具体框图如下所示
4.1.1 输入检测
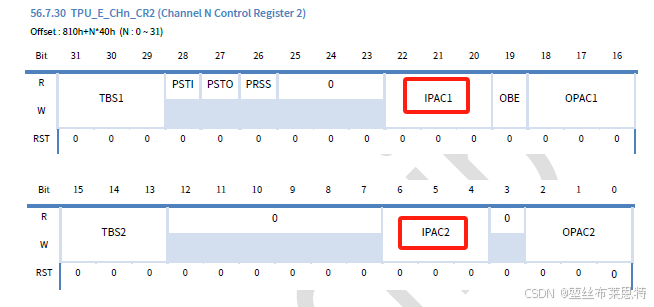
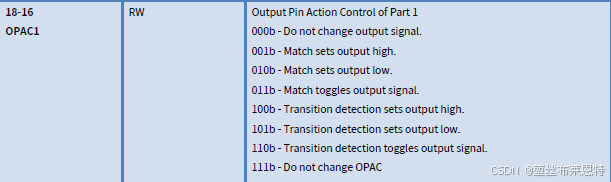
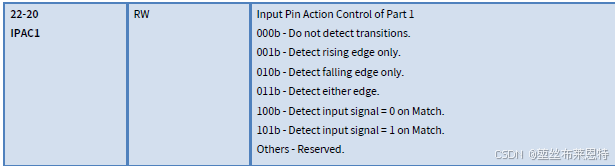 4.1.2 输出引脚控制
4.1.2 输出引脚控制
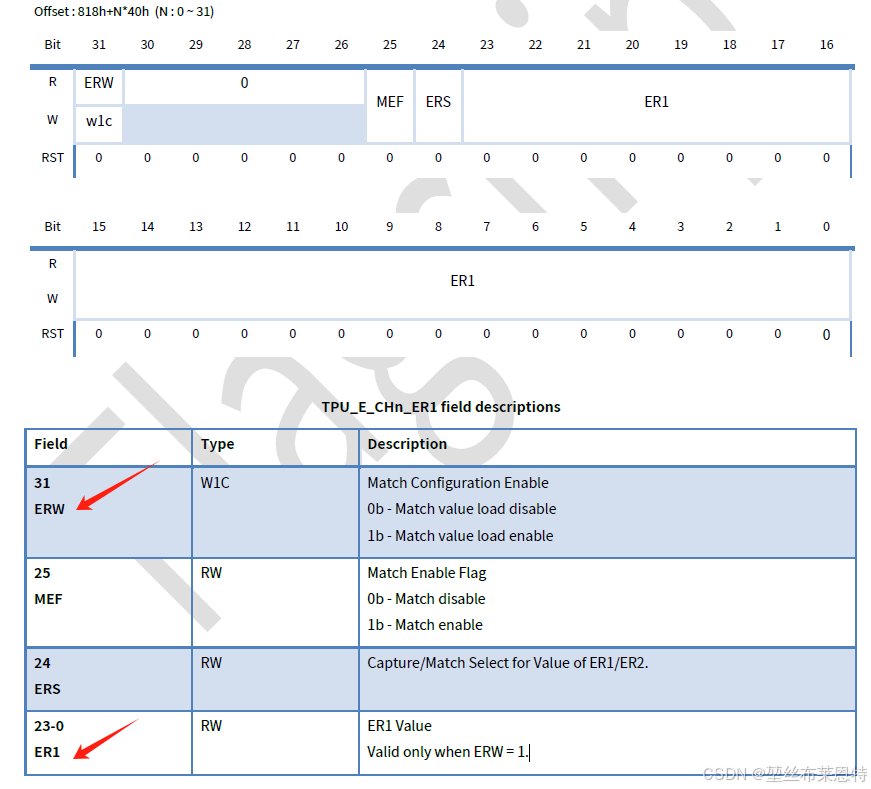
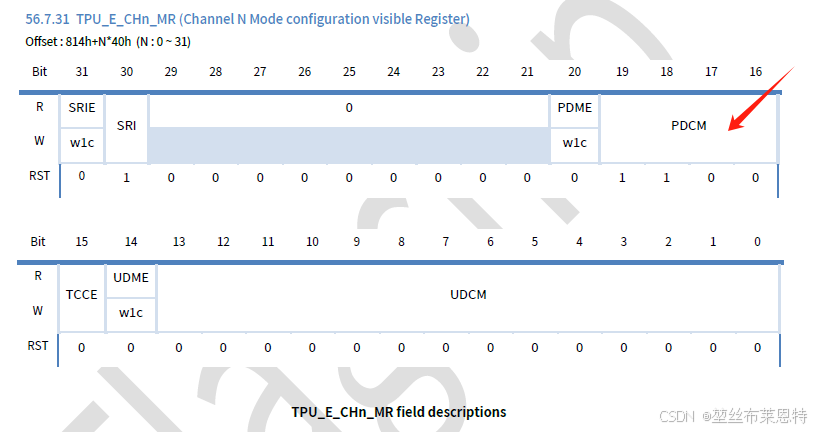
4.1.3 使能匹配和设定匹配值

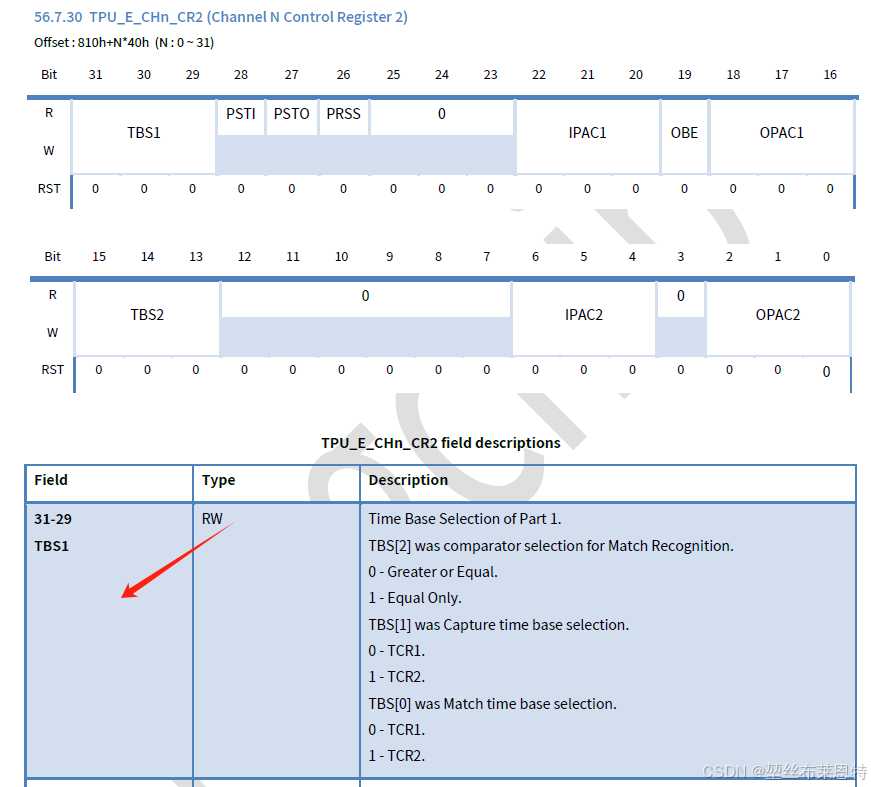
4.1.4 全局时基选择
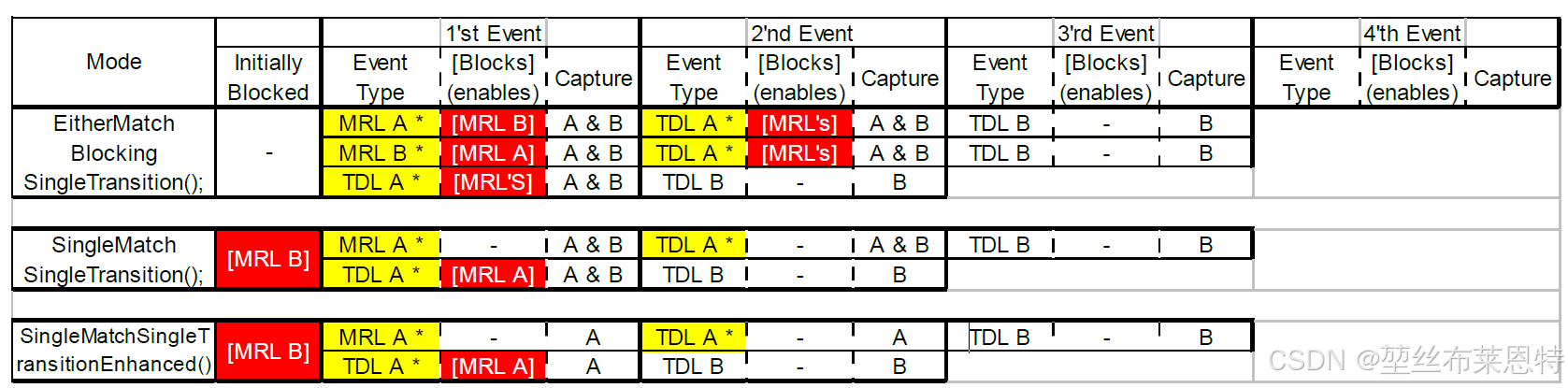
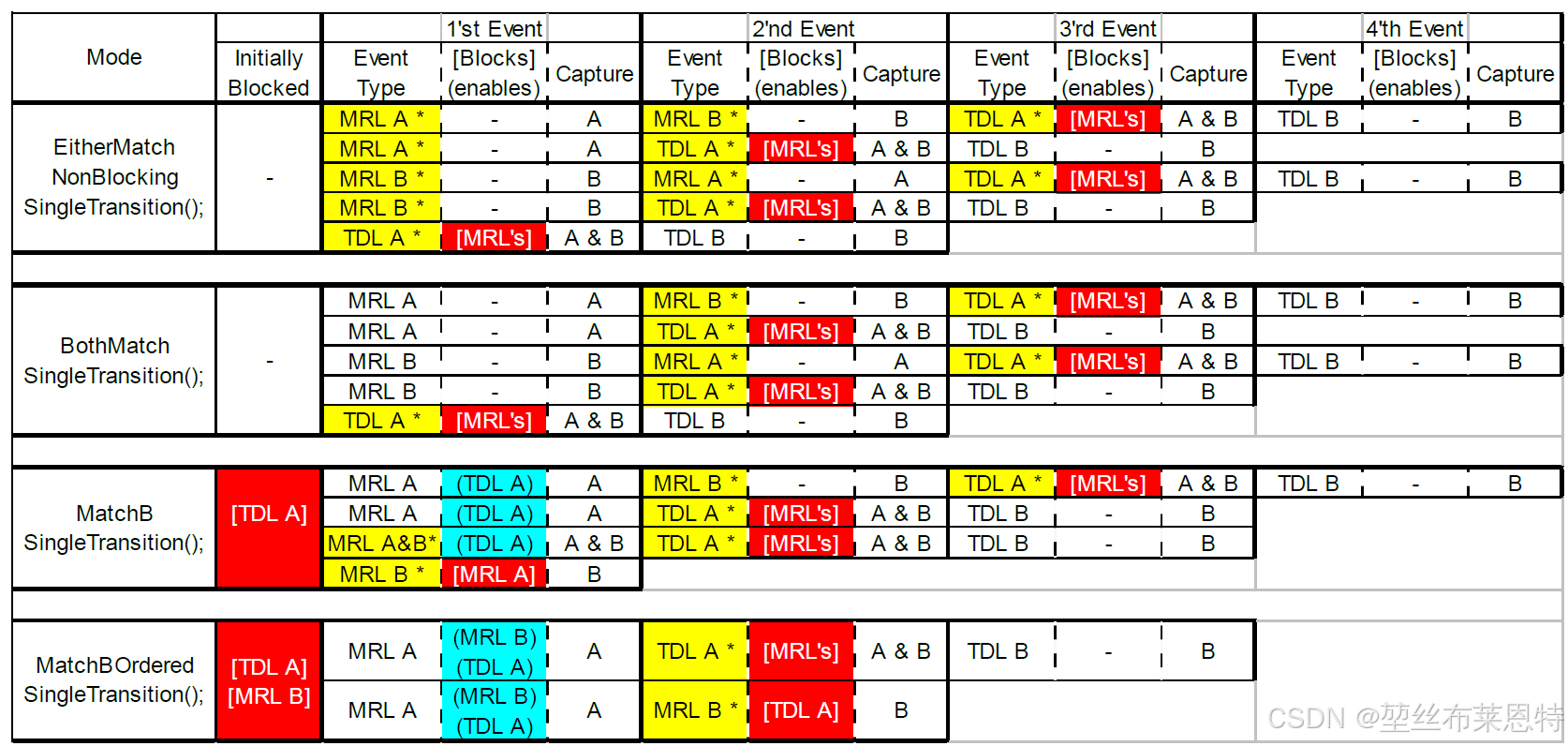
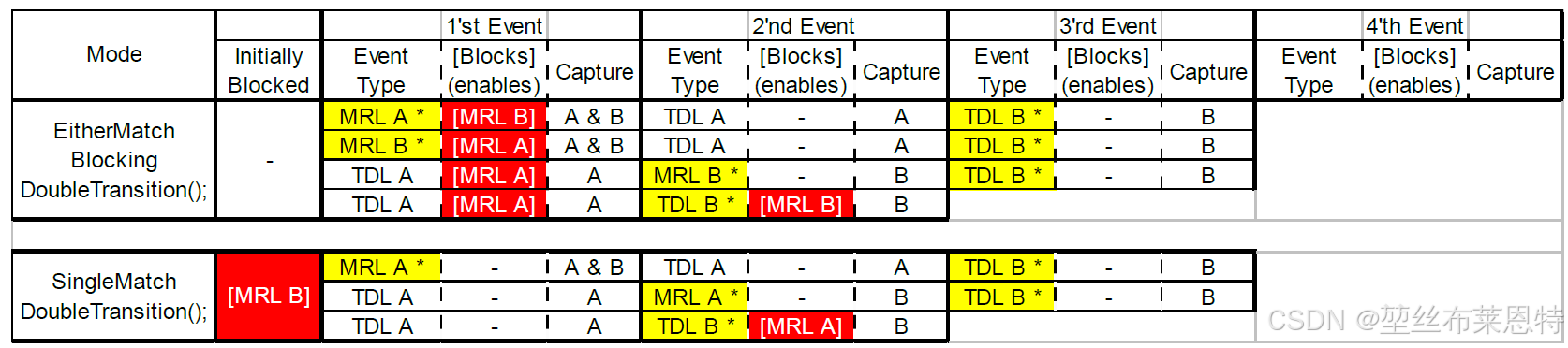
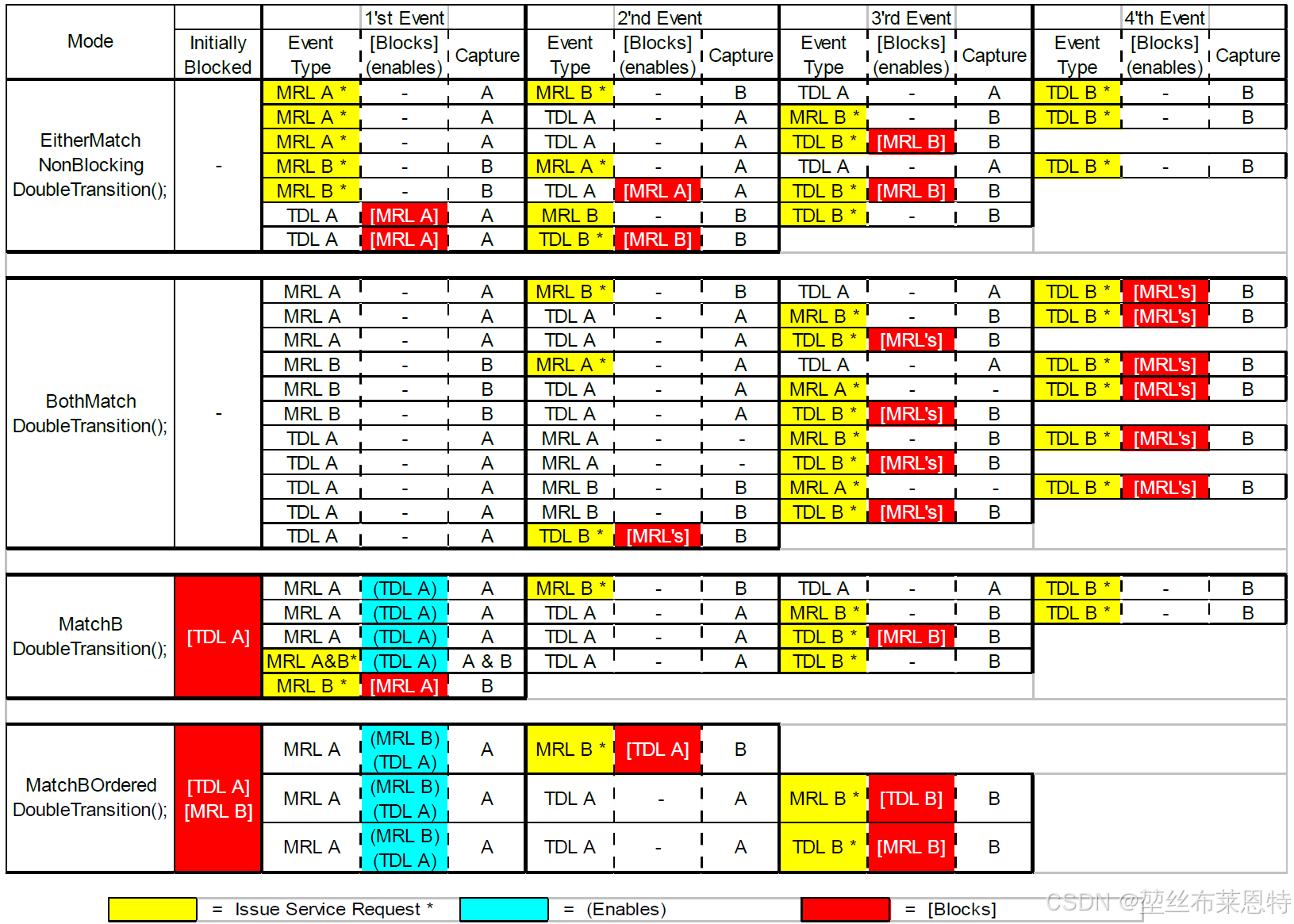
4.1.5 通道模式
在单跳变模式下,TDLA产生服务请求
在双跳变模式下,TDLB产生服务请求,TDLA不产生
阻塞模式下,先发生的匹配事件会阻塞后续的匹配事件
在非阻塞模式下,匹配之间不会相互阻塞
mrlB产生服务请求,mrlA不产生
Both Match
只有当两个匹配事件都发生了才会产生服务请求
Ordered (Match)
匹配必须按照顺序进行,先MRLA然后再MRLB。在MRLA发生之前,MRLB一直处于禁止状态
Either Match
匹配识别可以不按顺序执行
Single Match
只有动作单元A的匹配使能。动作单元B的匹配被禁止
4.2 HSR & HSA
4.2.1 Host侧的设置
TPU_H_HWA_SetChHSA(pTPUH, u8channel, true);
TPU_H_HWA_SetChHSRIdx(pTPUH, u8channel, u8HSRIdx);
TPU_H_HWA_SetChHSRISR(pTPUH, u8channel, (bool)true);发送HSR服务请求:
首先通过SR的状态位读取当前CAHNNEL有没有得到HSA的应答,如果没有应答信号,则会发送HSR的请求到Engine侧
if (TPU_GetHSA(TPU_CAPTURE_CHANNEL) != TPU_CAPTURE_START)
{
TPU_SendHSR(TPU_CAPTURE_CHANNEL);
}得到HSA应答后进入中断:
清除HSA的标志位并且响应响应的回调函数
static inline void TPU_Event_IRQHandler(uint8_t u8MinChannel, uint8_t u8MaxChannel)
{
TPU_H_Type *const pTpuH = TPU_H_BASE_PTRS;
uint8_t u8Channel;
for (u8Channel = (uint8_t)u8MinChannel; u8Channel < ((uint8_t)u8MaxChannel + 1u); u8Channel++)
{
if (TPU_H_HWA_GetChEventTrigISRStatus(pTpuH, u8Channel) == true)
{
if (s_TpuEventNotify[u8Channel] != NULL)
{
s_TpuEventNotify[u8Channel]();
}
}
if (TPU_H_HWA_GetChHSAReqStatus(pTpuH, u8Channel) == true)
{
TPU_H_HWA_ClearChHSA(pTpuH, u8Channel);
s_TpuHSANotify[u8Channel]();
}
}
}4.2.2 Engine侧的设置
TPU_E_HWA_EnableChEventInt(pTPUE, u8channel, (bool)true);
TPU_E_HWA_EnableSrvReq(pTPUE, u8channel, (bool)true);服务请求接收中断:
当有HSR服务请求过来的时候会进入HSR的中断服务函数,这时候需要发送HSA信号给到主机
void Bsp_Tpu_HSRCallback(void)
{
if (TPU_GetHSR(TPU_PWM_CHANNEL) == TPU_PWM_START)
{
TPU_SendHSA(TPU_PWM_CHANNEL, TPU_PWM_START);
}
}事件触发中断:
当有EVENT事件产生的时候(参考channel mode章节)会进入事件中断
4.3 角度模式
4.3.1 角度的概念
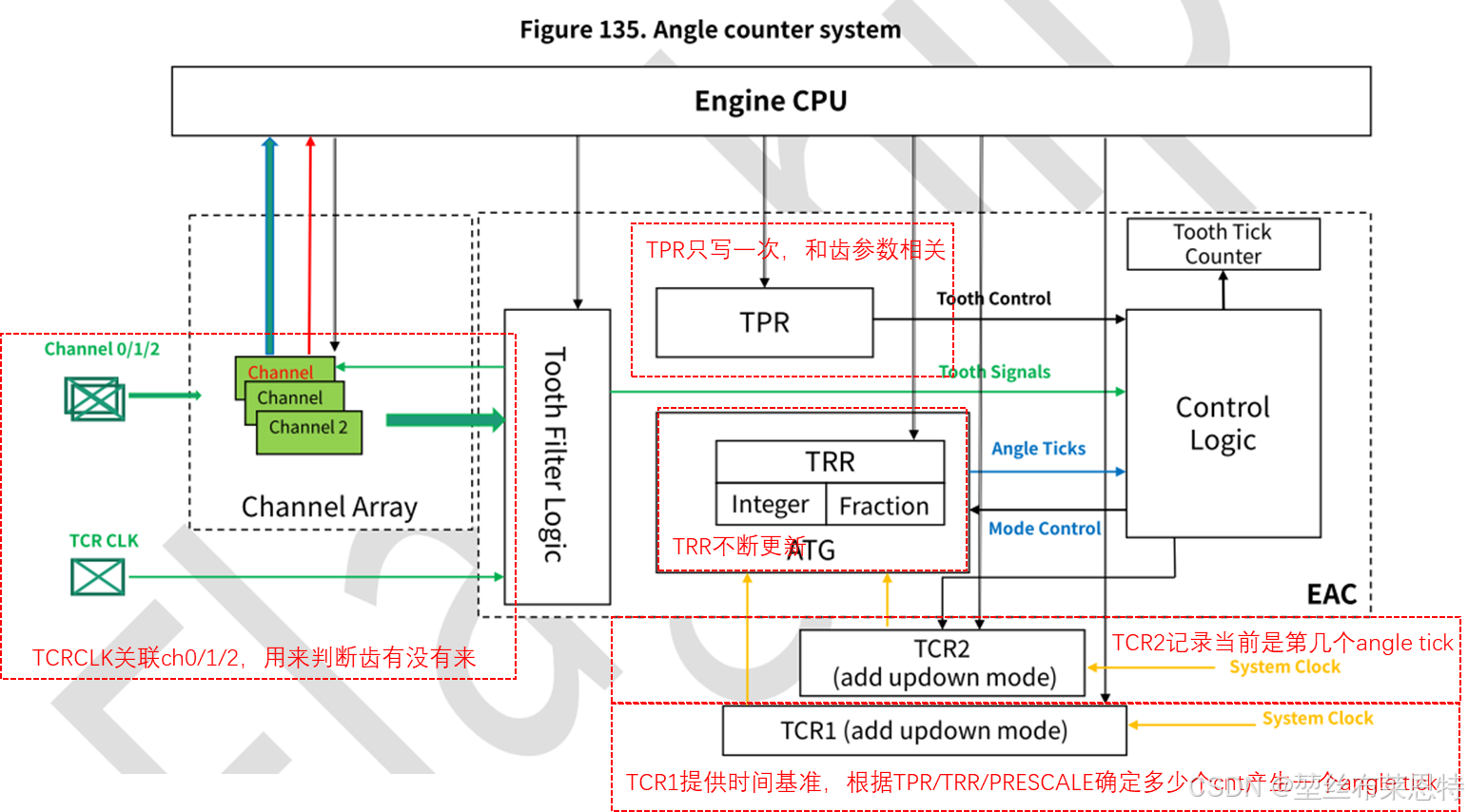
常用EAC角度计数模式
EAC示意图,有三个通道做齿信号识别
TPR指一个齿信号分成多少个tick
TRR指多少个bus clock增加一个tick,真正的两个齿之间的是bus cycle*TPR*TRR
Trr和TPR设置好后tick就会不停的加,加到设定的tick数后看齿信号是否到来,没来halt住,提前来了就快速得加。
这样tick加到预设值的时候就会有中断到来,在中断中就可以调节下一个齿信号的tick周期,让计数跟得上发动机
4.3.2 曲轴介绍
曲轴信号如下图所示

EAC中设定一个齿信号TCR2增加TPR个angle tick。实际应用中发动机会加减速,TCR2的角度计数需要跟上发动机的速度,因此通过修改TRR的值来使TCR2跟上发动机的速度
TPR寄存器如下图所示

TRR寄存器如下图所示
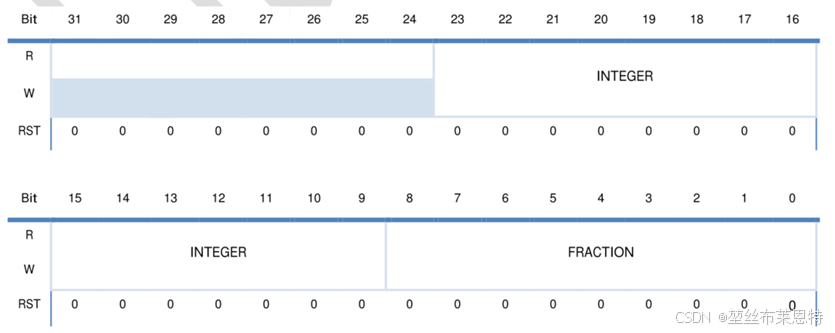
一个齿分为多少个tick,通过TPR寄存器的tick段实现,最多1024个tick,这个tick设定后就不会再改变
匀速的时候每个齿增加的tick数一样,但加减速tick会比齿提前或延迟到来,可以通过改变TRR的值来让计数跟上发动机的速度。
比如减速的时候,齿是延迟到来的,那就增大TRR,加速的时候齿提前到来,那就减小TRR
4.3.3 匀速 减速 加速EAC的处理
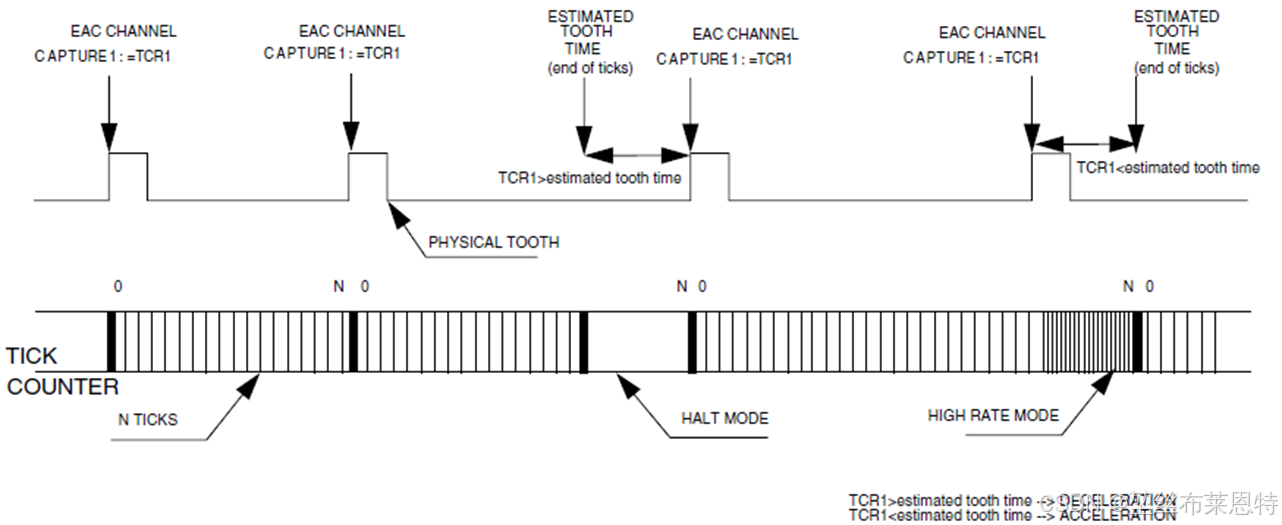 1.匀速:预测的齿信号到来,tick数刚好达到预设值
1.匀速:预测的齿信号到来,tick数刚好达到预设值
2.减速:tick数达到预设值,但是齿信号没到,此时angle tick counter处于halt mode
3.加速:齿信号到来,但是tick数没达到预设值,此时angle tick counter处于high rate mode
4.3.4 缺齿和最后齿
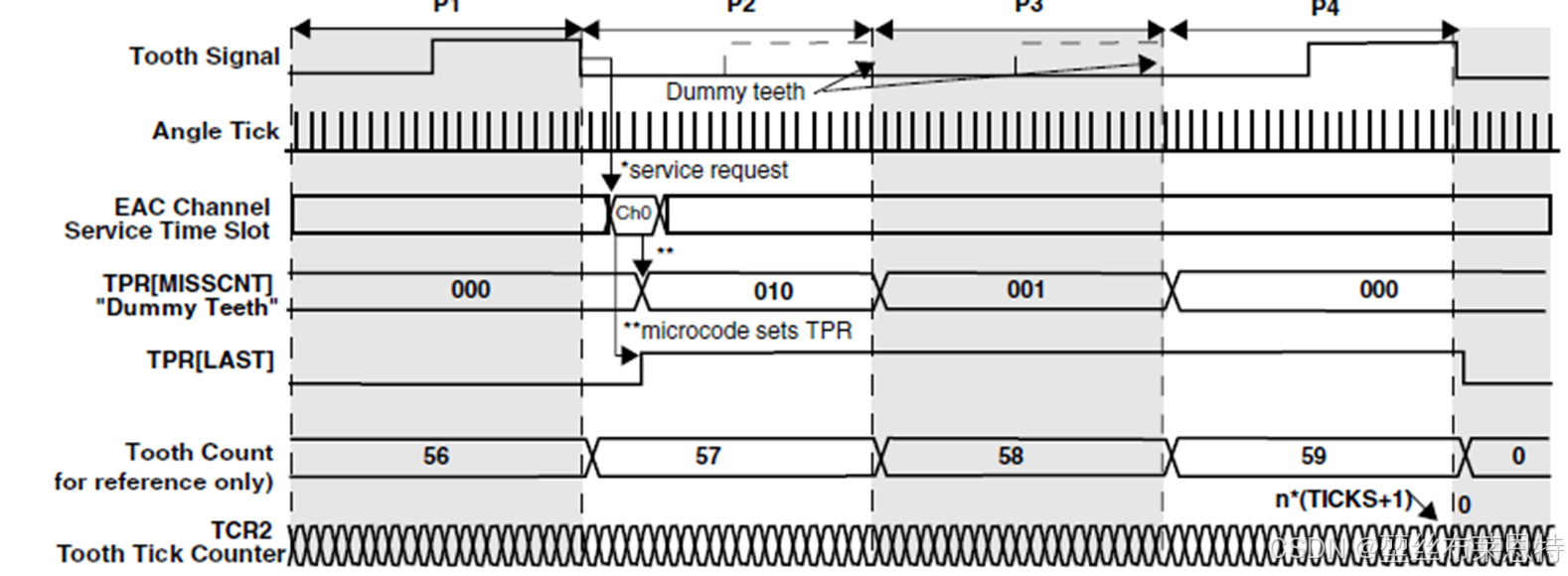
1.缺齿:检测到缺齿,EAC会自动加两个齿周期
2.最后齿:可做重置TCR2的操作


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









