






 该博客介绍了一段MATLAB代码,用于实现A*寻路算法,从起点到终点规划路径。代码首先定义了地图,设置障碍物和起终点,然后通过不断扩展节点并比较代价函数来寻找最优路径。最终,绘制出找到的路径。
该博客介绍了一段MATLAB代码,用于实现A*寻路算法,从起点到终点规划路径。代码首先定义了地图,设置障碍物和起终点,然后通过不断扩展节点并比较代价函数来寻找最优路径。最终,绘制出找到的路径。
clear;clc;close all;
figure(1);
ImpRgb=imread("map.png");
Imp=rgb2gray(ImpRgb);
imshow(Imp);
hold on;
rows=size(Imp,1);
cols=size(Imp,2);
Map=ones(rows,cols);
%空闲值设为1 障碍物设为2 起始点和终点分别为 3 4
startpose=[250,100];
goalpose=[800,900];
plot(startpose(2),startpose(1),'r*');
plot(goalpose(2),goalpose(1),'r*');
hold on;
startInd=sub2ind([rows,cols],startpose(1),startpose(2));
goalInd=sub2ind([rows,cols],goalpose(1),goalpose(2));
Map(startpose(1),startpose(2))=3;
Map(goalpose(1),goalpose(2))=4;
%--障碍物
for i=228:645
for j=310:588
Map(j,i)=2;
end
end
for k=175:785
for l=1025:1270
Map(k,l)=2;
end
end
%初始化
parentNode=startpose;
closeList=[startInd,0];
openList=struct;
childNodes=testGetChildnode(Map,closeList,parentNode);
for i=1:length(childNodes)
openList(i).node=childNodes(i).node;
openList(i).row=childNodes(i).row;
openList(i).col=childNodes(i).col;
openList(i).g=sqrt(2);
openList(i).h=norm([goalpose(1),goalpose(2)]-[childNodes(i).row,childNodes(i).col]);
openList(i).f=openList(i).g+openList(i).h;
end
%初始化path
for i=1:rows*cols
path{i,1}=i;
end
for i=1:length(childNodes)
path{childNodes(i).node,2}=[[startpose(1),startpose(2)];[childNodes(i).row,childNodes(i).col]];
end
[~,idx_min]=min([openList.f]);
parentNode=[openList(idx_min).row,openList(idx_min).col];
while true
childNodes=testGetChildnode(Map,closeList,parentNode);
%判断这些子节点是否在openlist中 --若在,则比较更新 --不在,追加到openlist中
for i=1:length(childNodes)
[in_flag,idx]=ismember(childNodes(i).node,[openList.node]);
%计算代价函数
g=sqrt(2)+openList(idx_min).g;
h=norm([goalpose(1),goalpose(2)]-[childNodes(i).row,childNodes(i).col]);
f=g+h;
if in_flag %如果在openlist中 比较f 更新
if f<openList(idx).f
openList(idx).f=f;
openList(idx).h=h;
openList(idx).g=g;
openList(idx).row=childNodes(i).row;
openList(idx).col=childNodes(i).col;
path{childNodes(i).node,2}=[path{childNodes(i).parentInd,2};[childNodes(i).row,childNodes(i).col]];
end
else %不在的话追加到openlist中
openList(end+1).node=childNodes(i).node;
openList(end).g=g;
openList(end).h=h;
openList(end).f=f;
openList(end).row=childNodes(i).row;
openList(end).col=childNodes(i).col;
path{childNodes(i).node,2}=[path{childNodes(i).parentInd,2};[childNodes(i).row,childNodes(i).col]];
end
end
closeList(end+1,:)=[openList(idx_min).node,openList(idx_min).f];
openList(idx_min)=[];
%重新搜索
[~,idx_min]=min([openList.f]);
parentNode=[openList(idx_min).row,openList(idx_min).col];
if (norm([parentNode(1),parentNode(2)]-[goalpose(1),goalpose(2)])<sqrt(2)/2)
path{goalInd,2}=[path{openList(idx_min).node,2};[goalpose(1),goalpose(2)]];
break;
end
end
path_target=path{goalInd,2};
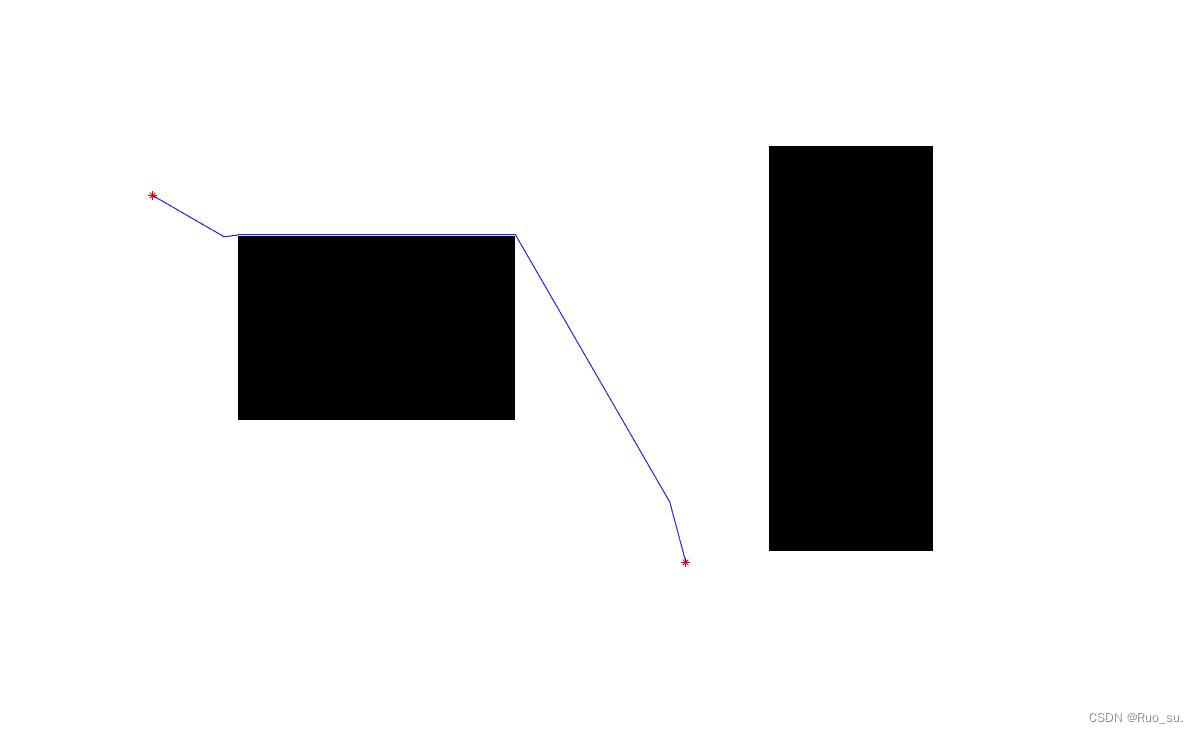
plot(path_target(:,2),path_target(:,1),'b-');
function childNodes=testGetChildnode(Map,closeList,parentNode)
%每隔30°选取一个扩展点 --12个
%--排除超过边界之外的、位于障碍物的、位于closelist中的
%[rows,cols]=size(Map)
%将parentnode 整数化
rows=960;
cols=1536;
node1=round(parentNode(1));
node2=round(parentNode(2));
parentNode_ind=sub2ind([rows,cols],node1,node2);
childNodes=struct;
closeList=closeList(:,1);
r=2;
%--1
i=0;
childNode=[parentNode(1),parentNode(2)-r];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols) %边界内
node1=round(childNode(1));
node2=round(childNode(2)); %子节点所在栅格 --不是障碍物
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=1+i;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--2
childNode=[parentNode(1),parentNode(2)+r];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--3
childNode=[parentNode(1)-r,parentNode(2)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--4
childNode=[parentNode(1)+r,parentNode(2)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--5
childNode=[parentNode(1)+r*sin(pi/6),parentNode(2)-r*cos(pi/6)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--6
childNode=[parentNode(1)-r*sin(pi/6),parentNode(2)-r*cos(pi/6)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--7
childNode=[parentNode(1)+r*sin(pi/6),parentNode(2)+r*cos(pi/6)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--8
childNode=[parentNode(1)-r*sin(pi/6),parentNode(2)+r*cos(pi/6)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--9
childNode=[parentNode(1)+r*sin(pi/3),parentNode(2)-r*cos(pi/3)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--10
childNode=[parentNode(1)-r*sin(pi/3),parentNode(2)-r*cos(pi/3)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--11
childNode=[parentNode(1)+r*sin(pi/3),parentNode(2)+r*cos(pi/3)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
%--12
childNode=[parentNode(1)-r*sin(pi/3),parentNode(2)+r*cos(pi/3)];
if ~(childNode(1)<0.5 || childNode(1)>rows||childNode(2)<0.5 || childNode(2)>cols)
node1=round(childNode(1));
node2=round(childNode(2));
if Map(node1,node2)~=2
childNode_idx=sub2ind([rows,cols],node1,node2);
if ~ismember(childNode_idx,closeList)
i=i+1;
childNodes(i).node=childNode_idx;
childNodes(i).row=childNode(1);
childNodes(i).col=childNode(2);
childNodes(i).parentInd=parentNode_ind;
end
end
end
end
结果

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









