







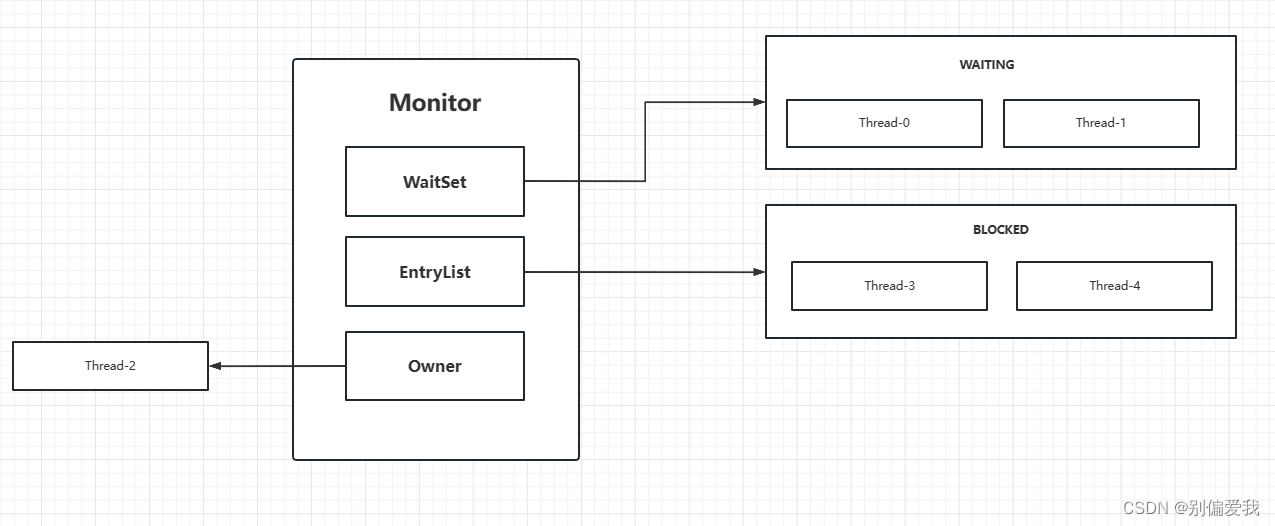
1 原理
- Owner 线程发现自己条件不满足,调用 wait 方法,进入 WaitSet 变为 Waiting 状态
- BLOCKED 和 WAITING 的线程都处于阻塞状态,不占用 CPU 时间片
- BLOCKED 线程会在 OWNER 线程释放锁唤醒
- WAITING 线程会在 OWNER 线程调用 notify 或 notifyAll 时被唤醒,但唤醒后不会立即获得锁,仍需要进入 EntryList 重新竞争锁
2 API使用
- obj.wait() Owner线程到 WaitSet 等待
- obj.notify() 在 object 上正在 WaitSet 等待的线程中挑一个唤醒
- obj.notifyAll() 让 object 上正在 WaitSet 等待的线程全部唤醒
static final Object lock = new Object();
public static void main(String[] args) throws InterruptedException {
new Thread(() -> {
synchronized (lock) {
log.info("Thread-1 执行...");
try {
lock.wait();
} catch (InterruptedException e) {
e.printStackTrace();
}
log.info("Thread-1 继续执行...");
}
}).start();
new Thread(() -> {
synchronized (lock) {
log.info("Thread-2 执行...");
try {
lock.wait();
} catch (InterruptedException e) {
e.printStackTrace();
}
log.info("Thread-2 继续执行...");
}
}).start();
TimeUnit.SECONDS.sleep(2);
synchronized (lock) {
lock.notify();
// lock.notifyAll();
}
}
3 wait(long n) 和 sleep(long n)区别
- sleep 是 Thread 方法,而 wait 是 Object 方法
- sleep 不需要强制和 synchronized 配合使用,但 wait 需要和 synchronized 一起用
- sleep 在睡眠的同时,不会释放对象锁的,但 wait 在等待的时候会释放对象锁
4 保护性暂停
Guarded Suspension
一个线程等待另一个线程的结果
- 有一个结果需要从一个线程传递到另一个线程,让他们关联同一个 GuardedObject
- 如果有结果不断从一个线程到另一个线程那么可以使用消息队列(见生产者/消费者)
- JDK中,join的实现,Future的实现,采用的就是此模式
- 因为要等待另一方的结果,因此归类到同步模式
5 pack & unpack
5.1 基本使用
Thread thread = new Thread(() -> {
try {
TimeUnit.SECONDS.sleep(1);
} catch (InterruptedException e) {
e.printStackTrace();
}
LockSupport.park();
});
thread.start();
LockSupport.unpark(thread);
5.2 特点
- wait notify 和 notifyAll 必须配合 Object Monitor 一起使用,而unpack不用
- pack & unpack 是以线程为单位 阻塞 和唤醒 线程,而notify只能随机唤醒一个等待线程,notifyAll唤醒所有线程
- pack & unpack 可以先 unpack, 而 wait & notify 只能先 wait 再 notify
5.3 原理
每个线程都会有一个packer对象
packer对象有三部分组成 _mutex、_counter、 _cond
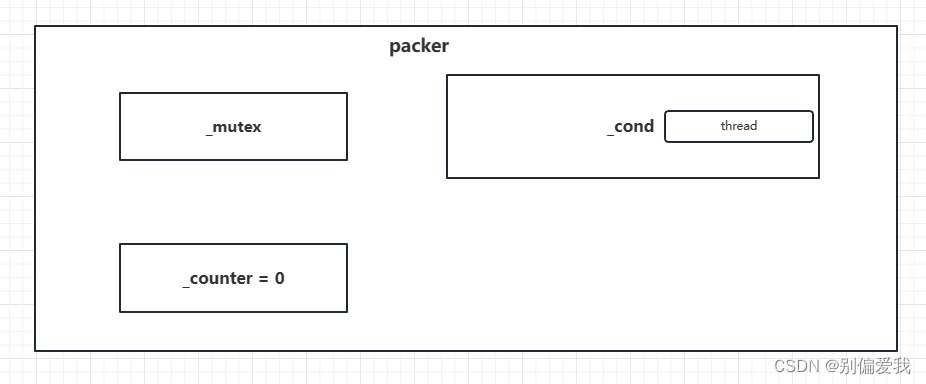
- 调用 pack 先检查_count (干粮) 是否为0
-
- 为0 ,表示干粮不足,进_cond (帐篷)休息
-
- 不为0,表示还有干粮,继续运行
- 调用unpack 给_count (干粮) 数量加1,干粮上线为1

















 392
392

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









