









一. 环境准备
1. 安装Anaconda虚拟环境
Anaconda是一个环境容器,也可以叫环境管理器。 作用:可以在Anaconda容器中为python项目创建不同的环境。在各个不同环境中可以安装不同版本的包并且各个环境互不影响。可以在使用不同项目时任意切换所用环境。
- 下载安装Anaconda
- 创建虚拟环境
conda create -n env-name python=3.10.0
2. 安装ultralytics组件
Ultralytics是一个开源的目标检测框架,由Ultralytics公司开发和维护。它基于YOLO(You Only Look Once)系列模型,通过引入新功能和改进,进一步提升了目标检测的性能和灵活性。
- [Home - Ultralytics YOLO Docs](https://docs.ultralytics.com/zh)ultralytics官方地址
- pip安装
pip install ultralytics -i https://pypi.tuna.tsinghua.edu.cn/simple
- conda安装
conda install -c conda-forge ultralytics
3. 安装pytorch
PyTorch是一个开源的Python机器学习库,基于Torch库,底层由C++实现,应用于人工智能领域,如计算机视觉和自然语言处理。
PyTorch主要有两大特征:类似于NumPy的张量计算,能在 GPU 或 MPS 等硬件加速器上加速;基于带自动微分系统的深度神经网络。
- PyTorch官网地址
- pip安装
- pytorch需安装2.0.0版本以上,对应的python也应在3.10.0以上
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
- conda安装
conda install pytorch torchvision torchaudio pytorch-cuda=11.8 -c pytorch -c nvidia 需要对应自己的cuda版本
二. 后端代码
安装好环境之后,就可以使用官网的训练代码对Yolov8进行训练,并得到最后的参数文件best.pt,紧接着就可以编写后端代码进行预测了。
接下来展示后端代码,后端代码是基于flask框架完成的,非常简单,首先对训练好的模型进行加载,然后对前端传进来的图像信息进行编码判断,使用加载的模型对图像进行预测,将预测得到的边界框信息转化成json格式回传给前端进行展示。
import cv2
import json
from flask import Flask, request
from PIL import Image
import numpy as np
import base64
import io
import os
from ultralytics import YOLO
PATH_TO_CKPT = '模型文件.pt'
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
model = YOLO(PATH_TO_CKPT)
app = Flask(__name__)
@app.route('/api/', methods=["POST"])
def main_interface():
response = request.get_json()
imageData = False;
if 'image' in response:
imageData = True;
data_str = response['image']
if imageData:
point = data_str.find(',')
base64_str = data_str[point:] # remove unused part like this: "data:image/jpeg;base64,"
image = base64.b64decode(base64_str)
img = Image.open(io.BytesIO(image))
if (img.mode != 'RGB'):
img = img.convert("RGB")
img_arr = np.array(img)
results = model.predict(img_arr, save=True, imgsz=640, conf=0.5)
return results[0].tojson()
@app.after_request
def add_headers(response):
response.headers.add('Access-Control-Allow-Origin', '*')
response.headers.add('Access-Control-Allow-Headers', 'Content-Type,Authorization')
return response
if __name__ == '__main__':
app.run(debug=True, host='0.0.0.0')三. 前端代码
使用后端代码将物体的边界框坐标转化成json后回传到前端,在前端代码中,对接收到的边界框坐标信息json字符串进行处理,在前端界面上进行展示。
//使用ajax将前端的图像数据传回给后端,并处理后端回传的边界框坐标信息
function communicate(imgBase64) {
$.ajax({
url: URL,
type: "POST",
contentType: "application/json",
data: JSON.stringify({"image": img_base64_url}),
dataType: "json"
}).done(function(response_data) {
Result(response_data);
});
}
//处理前端回传的图像文件,并调用ajax传输给后端处理
function parseFiles(files) {
const file = files[0];
const imageType = /image.*/;
if (file.type.match(imageType)) {
const reader = new FileReader();
reader.readAsDataURL(file);
reader.onloadend = () => {
image.src = reader.result;
communicate(reader.result);
}
}
}
//在前端界面上将边界框信息标注到图像上
function drawResult(results) {
canvas.width = image.width;
canvas.height = image.height;
ctx = canvas.getContext('2d');
ctx.clearRect(0, 0, canvas.width, canvas.height);
ctx.drawImage(image, 0, 0);
for(bboxInfo of results) {
bbox = bboxInfo['box'];
class_name = bboxInfo['name'];
score = bboxInfo['confidence'];
ctx.beginPath();
ctx.lineWidth="4";
ctx.strokeStyle="red";
ctx.fillStyle="red";
ctx.rect(bbox['x1'], bbox['y1'], bbox['x2'] - bbox['x1'], bbox['y2'] - bbox['y1']);
ctx.stroke();
ctx.font="30px Arial";
let content = class_name + " " + parseFloat(score).toFixed(2);
ctx.fillText(content, bbox['x1'], bbox['y1'] < 20 ? bbox['y1'] + 30 : bbox['y1']-5);
}
}
以上代码仅仅包含js中处理前端数据和后端数据重要的步骤,希望能对大家搭建前后端目标检测系统能有一定的帮助,如果需要全部代码的话可以私信我。
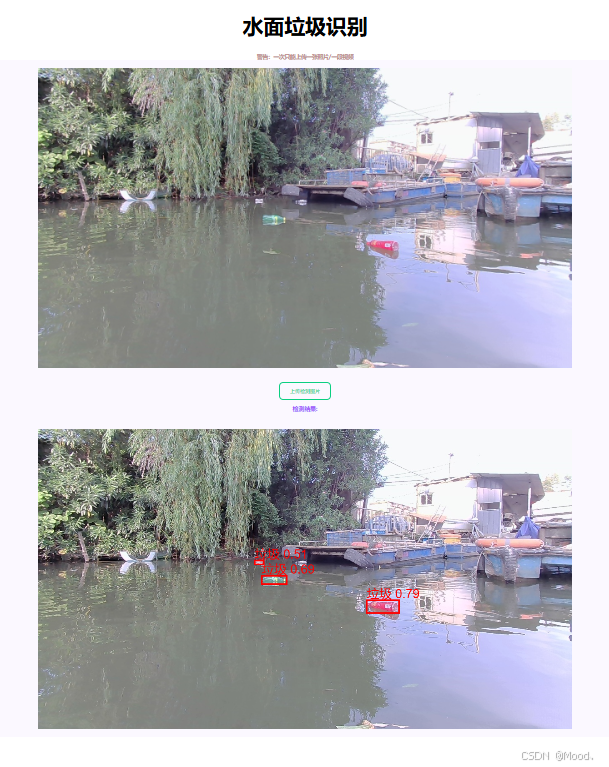
四. 效果展示
以下是这个前后端目标检测系统的一些大致的展示效果。

五. 河面垃圾数据集(9000+张)
河面垃圾数据集共包括有9000+张图像数据,其中:
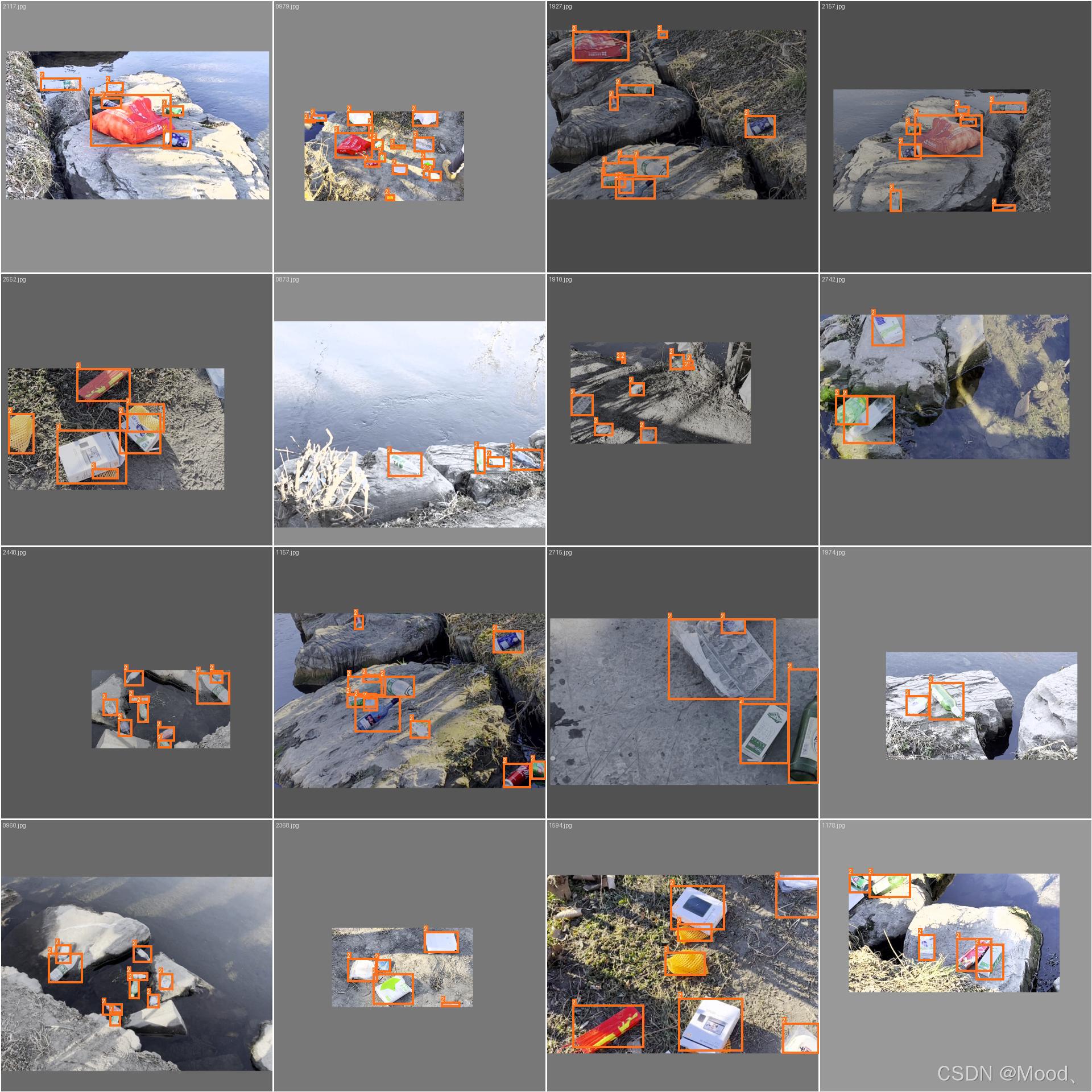
- 船载视角河面垃圾图像数据有4000+张
- 河岸垃圾的图像数据有2000+张
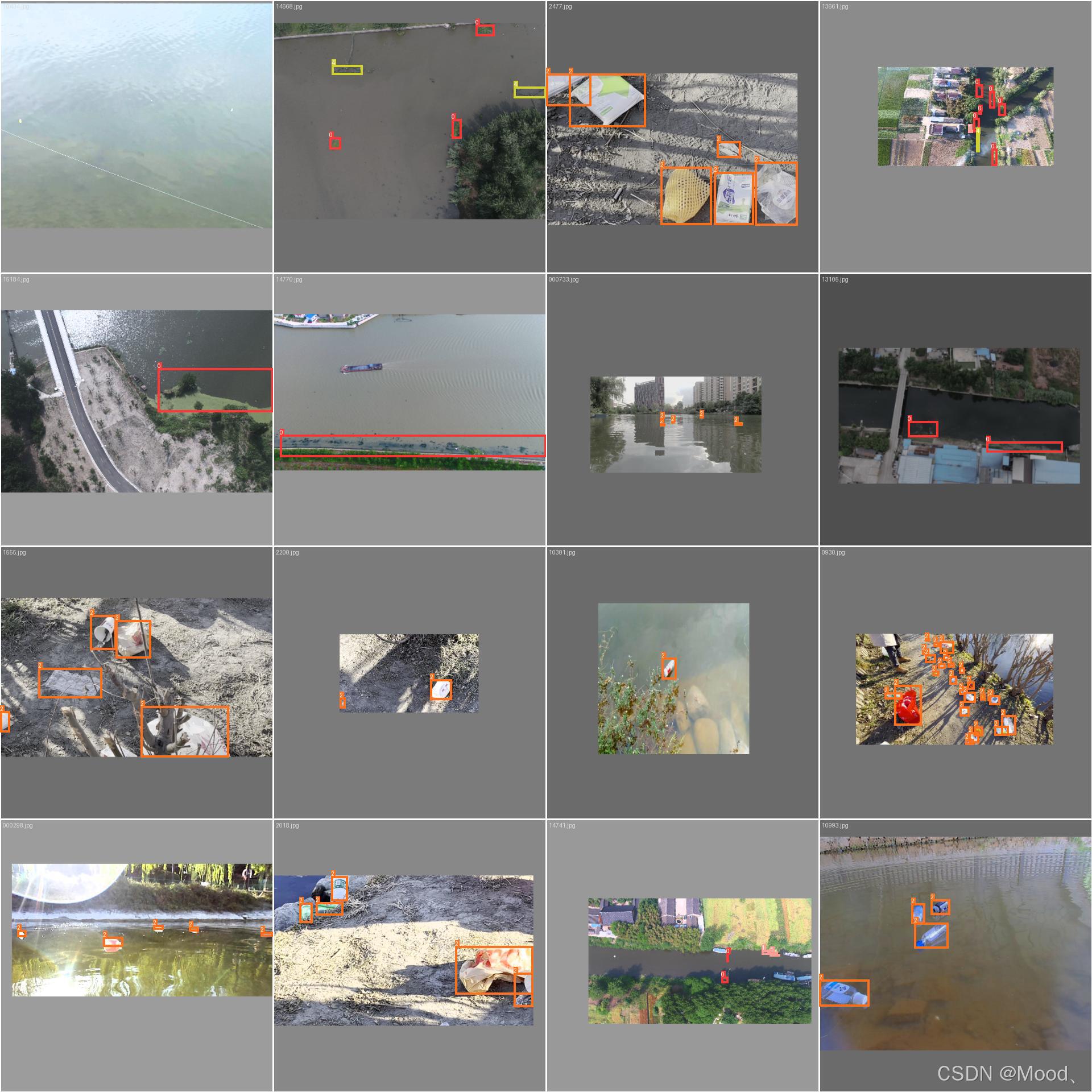
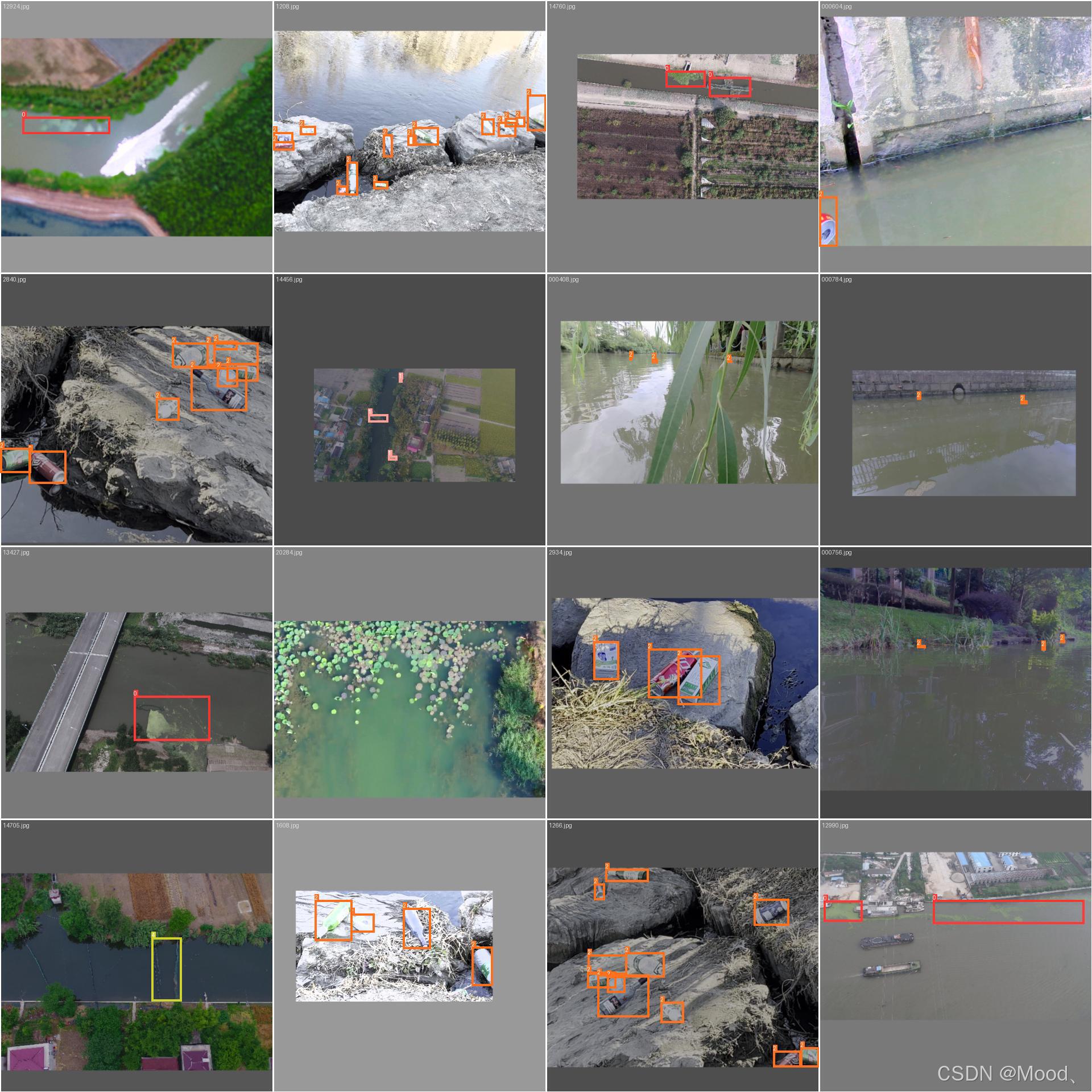
- 无人机视角下的河面垃圾图像数据有3000+张
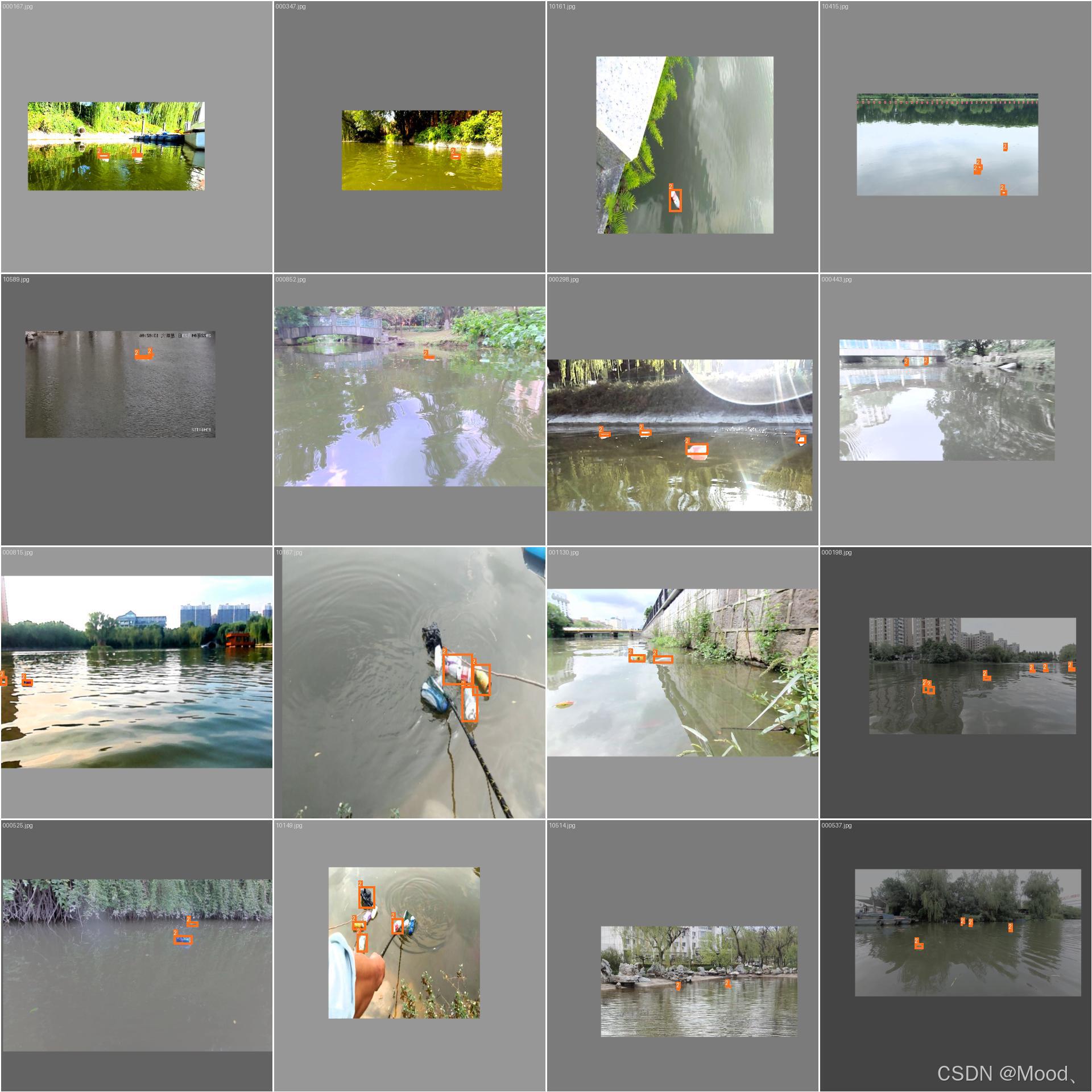
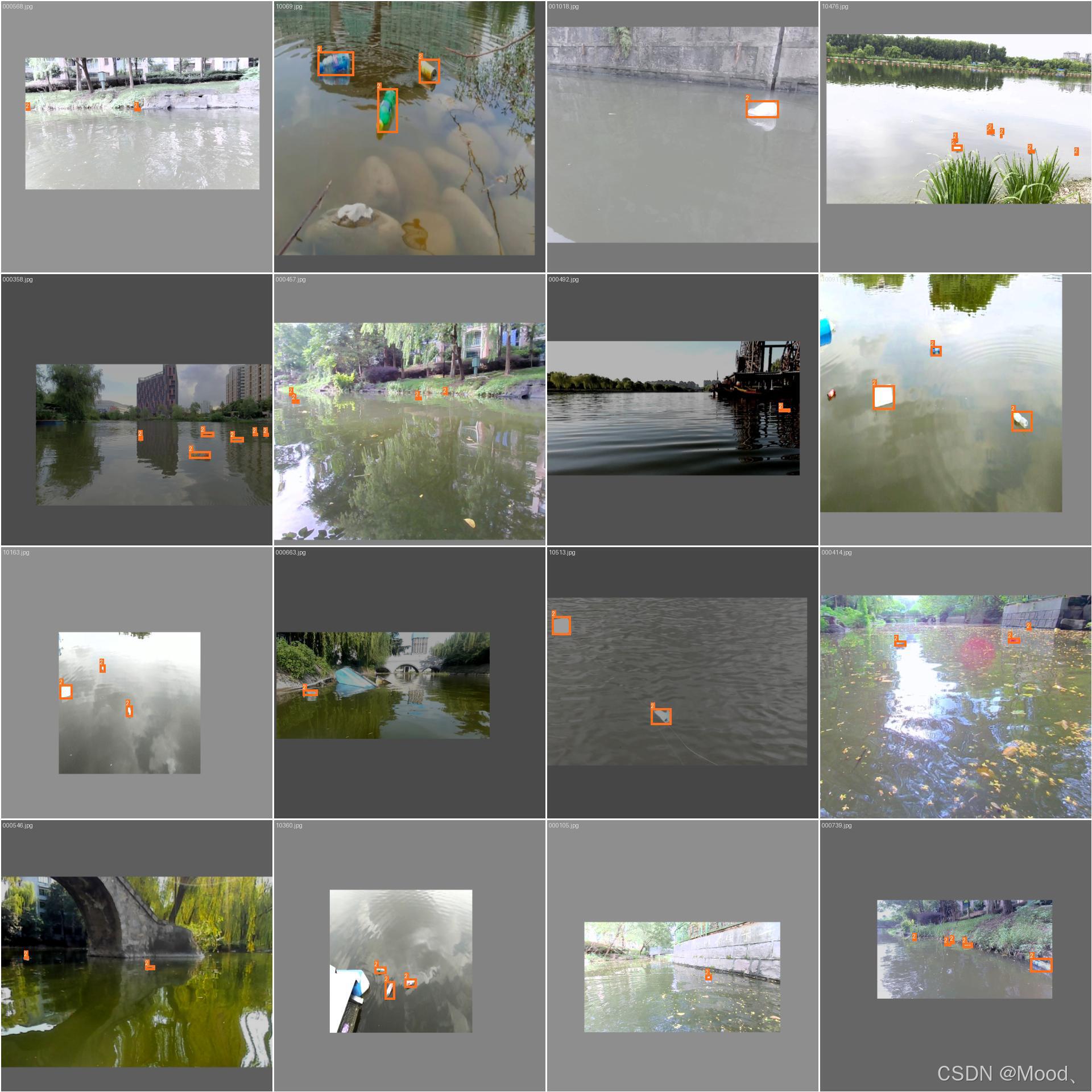
船载视角河面垃圾图像数据如下:
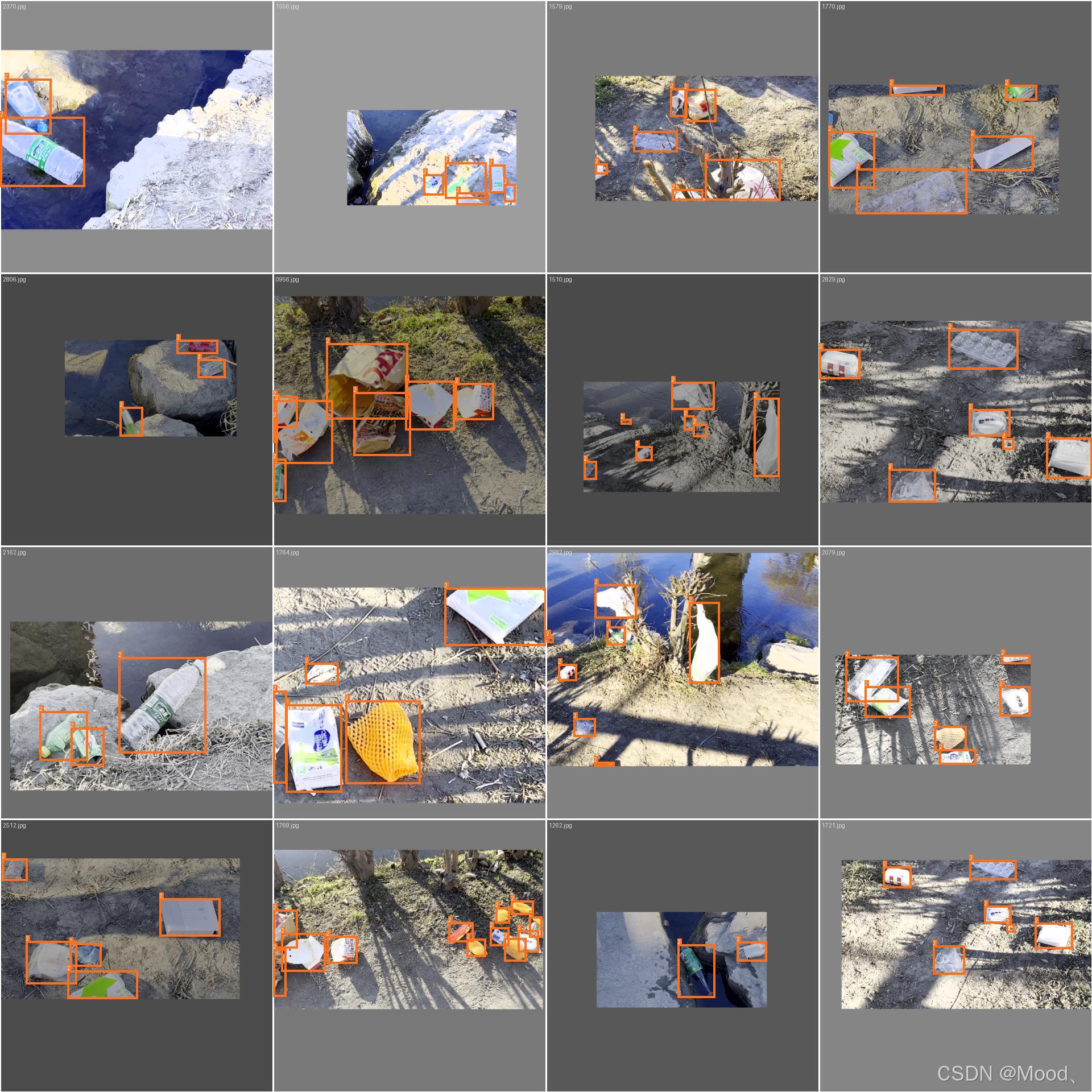
河岸垃圾的图像数据如下:
无人机视角下的河面垃圾图像数据如下:
大家如果对数据集有需要的话请私信我!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









