






一、引言
加油站作为石油产品的主要供应点,其安全运营至关重要。油罐车作为运输和补给燃油的关键设备,在加油站的安全管理中扮演着重要角色。为了提升油罐车的检测精度和效率,我们构建了一个加油站油罐车检测数据集。该数据集旨在提供多样化的油罐车图像样本,涵盖不同角度、光照条件和背景环境,以支持油罐车检测算法的研发和优化。
二、数据集概述
数据集名称:加油站油罐车检测数据集
数据规模:包含1200张图片/视频帧,格式为JPEG/PNG/AVI/MP4等。
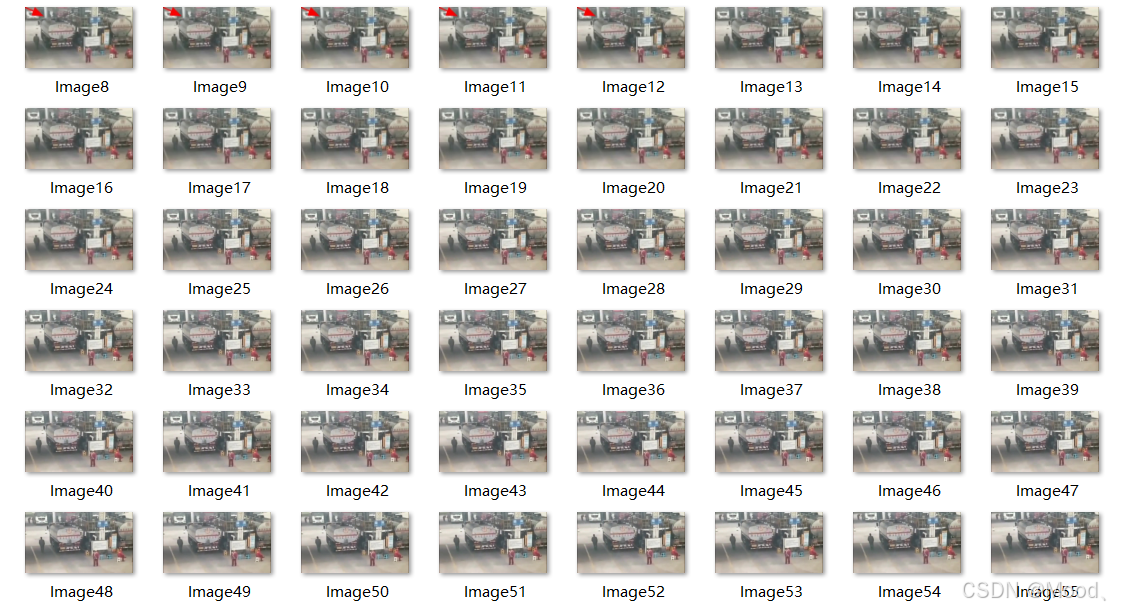
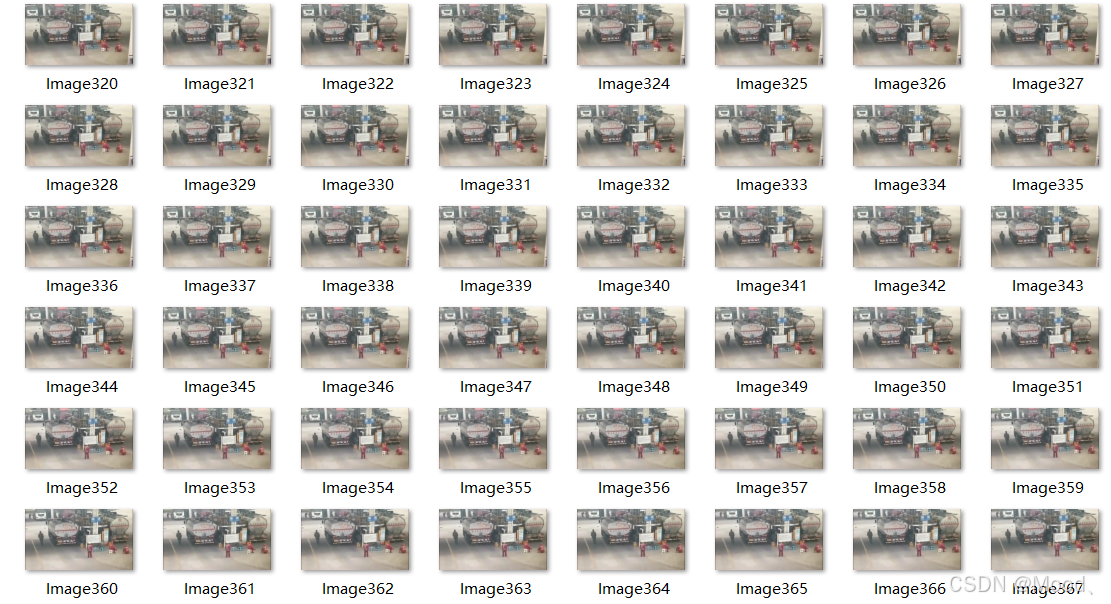
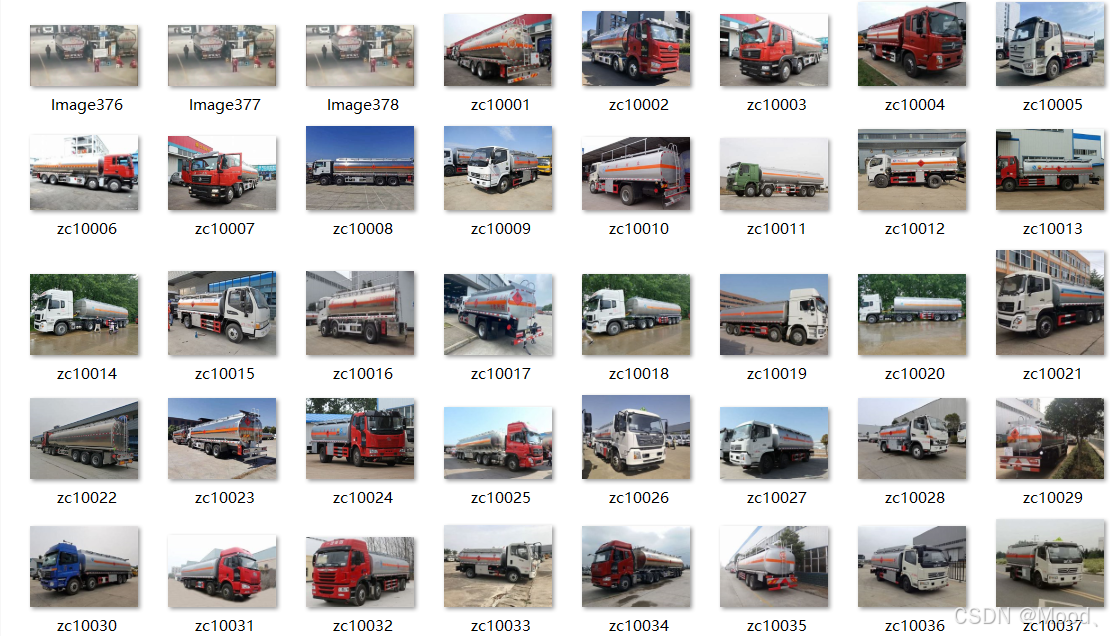
数据来源:实地拍摄加油站内外停放的油罐车。
数据标注:每张图片/视频帧均附有详细的标注信息,包括油罐车的位置(边界框)、类型、方向等。
三、数据收集与预处理
- 数据收集:
- 在多个加油站进行实地拍摄,捕捉不同时间段、不同天气条件下的油罐车图像。
- 多种拍摄角度,确保捕捉到的油罐车图像清晰、细节丰富。
- 数据预处理:
- 对图片/视频帧进行去噪、增强对比度等预处理操作,提高图像质量。
- 使用标注工具(如LabelImg、VOCdevkit等)手动标注每张图片/视频帧中的油罐车区域。
- 生成对应的标注文件,确保标注信息的准确性和完整性。
四、数据标注说明
- 边界框:标注油罐车的位置,使用矩形框表示油罐车区域。
- 油罐车类型:根据油罐车的外观特征,分为不同类型,如罐体形状、颜色、标识等。
- 油罐车方向:记录油罐车的朝向,如正面、侧面、背面等。
- 其他信息:如拍摄时间、光照条件、背景环境等(可选标注)。
加油站油罐车检测数据集/
├── images/
│ ├── 0001.jpg
│ ├── 0002.jpg
│ └── ...
├── labels/
│ ├── 0001.txt
│ ├── 0002.txt
│ └── ...
五、使用指南
- 下载数据集:感兴趣请私信!!!感兴趣请私信!!!感兴趣请私信!!!
- 数据加载:使用Python等编程语言,结合OpenCV、PIL等图像处理库,以及视频处理库(如ffmpeg),加载图片/视频帧和标注文件。
- 算法训练:基于深度学习框架(如TensorFlow、PyTorch等),构建油罐车检测模型,使用数据集进行训练和验证。
- 模型评估:通过准确率、召回率、mAP(mean Average Precision)等指标评估模型性能,优化模型参数和结构。
- 模型部署:将训练好的模型部署至加油站监控系统,实现油罐车的实时监测和识别。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









