







 该文介绍了两个函数,DrawingTrajectories用于绘制小车的运动轨迹和当前位置,以及目标点,而GazeboTrackPlotting则将Gazebo地图映射到MATLAB并显示小车轨迹。这两个函数考虑了坐标系差异和地图比例因素,帮助理解和分析小车在仿真环境中的运动。
该文介绍了两个函数,DrawingTrajectories用于绘制小车的运动轨迹和当前位置,以及目标点,而GazeboTrackPlotting则将Gazebo地图映射到MATLAB并显示小车轨迹。这两个函数考虑了坐标系差异和地图比例因素,帮助理解和分析小车在仿真环境中的运动。
1、Drawing Trajectories
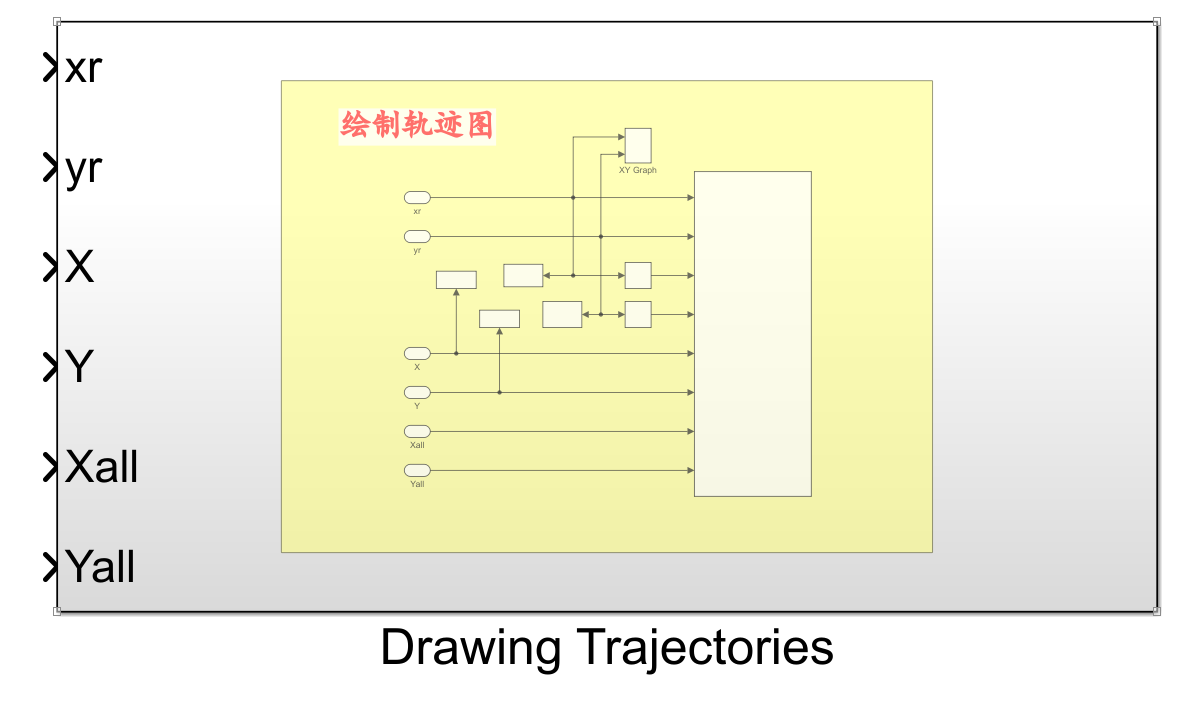
(1)输入参数: xr和yr为小车在世界坐标系下当前的位置坐标,X和Y世界坐标系下当前目标点的位置坐标,Xall与Yall为完整的需要跟踪的轨迹,仅用来画图作为参考,与小车的控制无关
(2)输出参数:无
(3)主要作用:绘制出小车完整的轨迹,作为参考,绘制出小车当前的位置及走过的运动轨迹,绘制出小车当前的目标点位置,并将小车的当前位置与当前目标点的位置连线绘制出来
(4)内部结构:
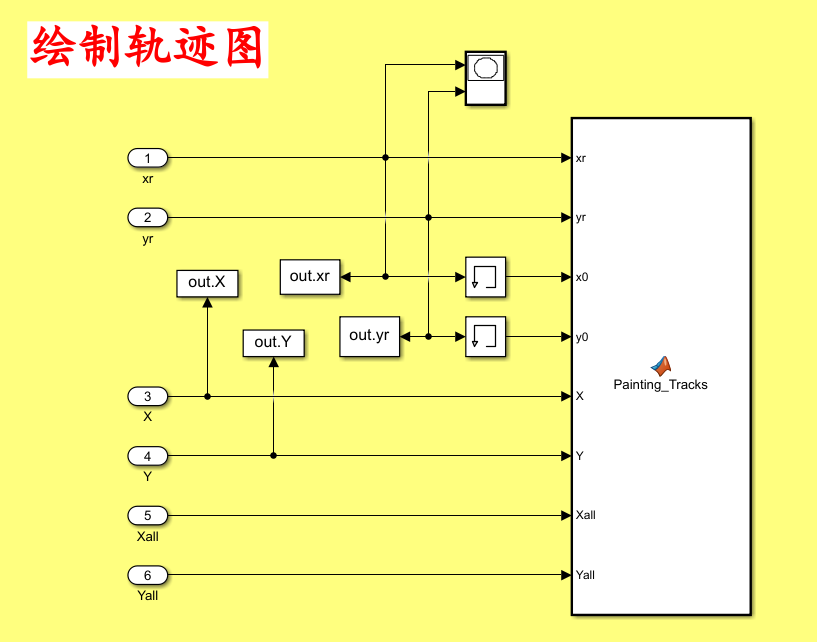
(5)具体实现过程:使用memory模块将输入的xr和yr的上一次的值保存下来,作为输入给Painting_Tracks函数,用来绘制运动轨迹,为了后续对轨迹进行再现,将每一时刻的当前位置和目标点位置,使用simout模块输出至工作空间进行保留
Painting_Tracks函数的内容如下:
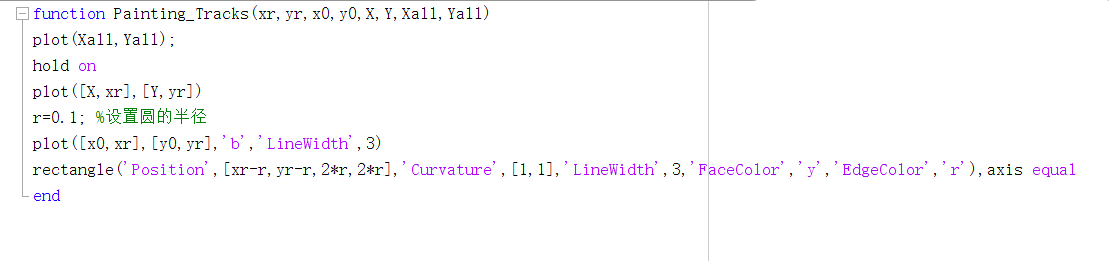
(6)其他说明:无
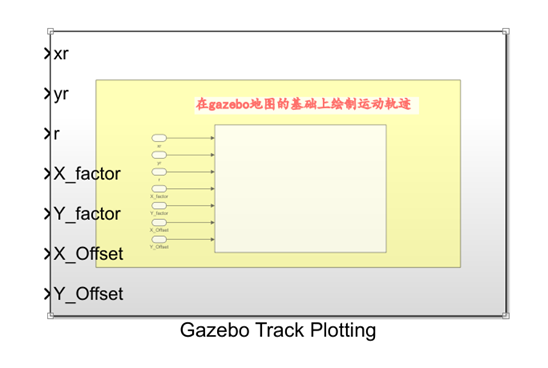
2、Gazebo Track Plotting
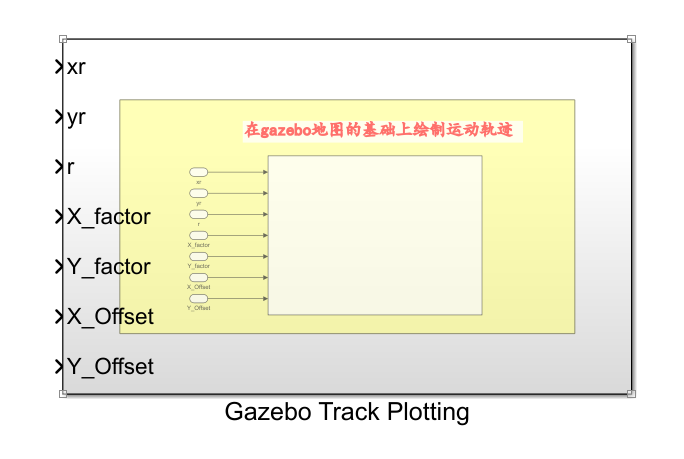
(1)输入参数: xr和yr为小车在世界坐标系下当前的位置坐标,r为绘制的小圆的半径,比如可设为0.3,X_factor和 X_factor是MATLAB中的地图与Gazebo中地图的变换比例,X_Office和 Y_Office是MATLAB中的地图原点与Gazebo中地图原点的偏移量
(2)输出参数:无
(3)主要作用:将Gazebo中地图映射到MATLAB中,并在此地图基础上绘制小车的运动轨迹
(4)内部结构:
(5)具体实现过程:实现过程及输入参数计算及调试方法见文档《使用MATLAB绘制Gazebo中的仿真小车的运动轨迹》,链接如下:
使用MATLAB绘制Gazebo中的仿真小车的运动轨迹 https://blog.youkuaiyun.com/qq_44339029/article/details/121399701
https://blog.youkuaiyun.com/qq_44339029/article/details/121399701
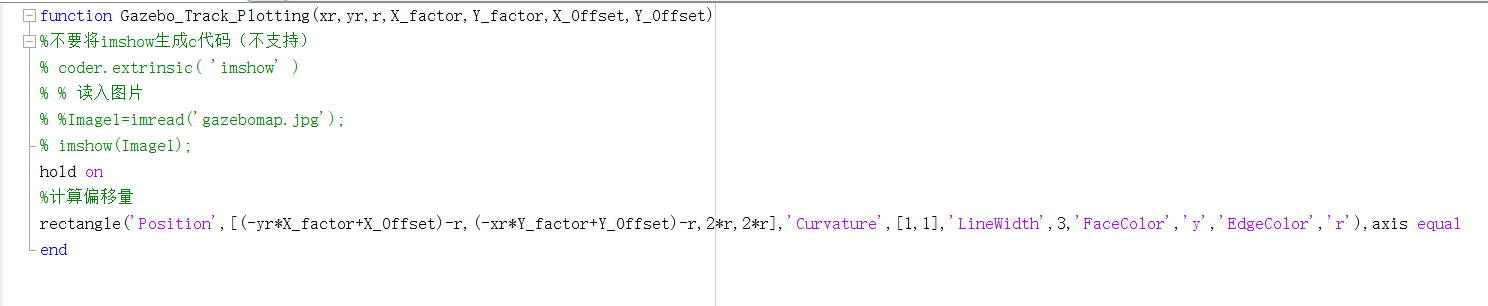
Gazebo_Track_Ploting函数的内容如下:


















 9187
9187

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











