




我是之前跑通一个例程,运行官方的数据集,具体,可以看我之前的博客。
环境:ubuntu 18.04 ORB_SLAM2
首先打开ORB-SLAM2文件夹,样子刚开始为以下
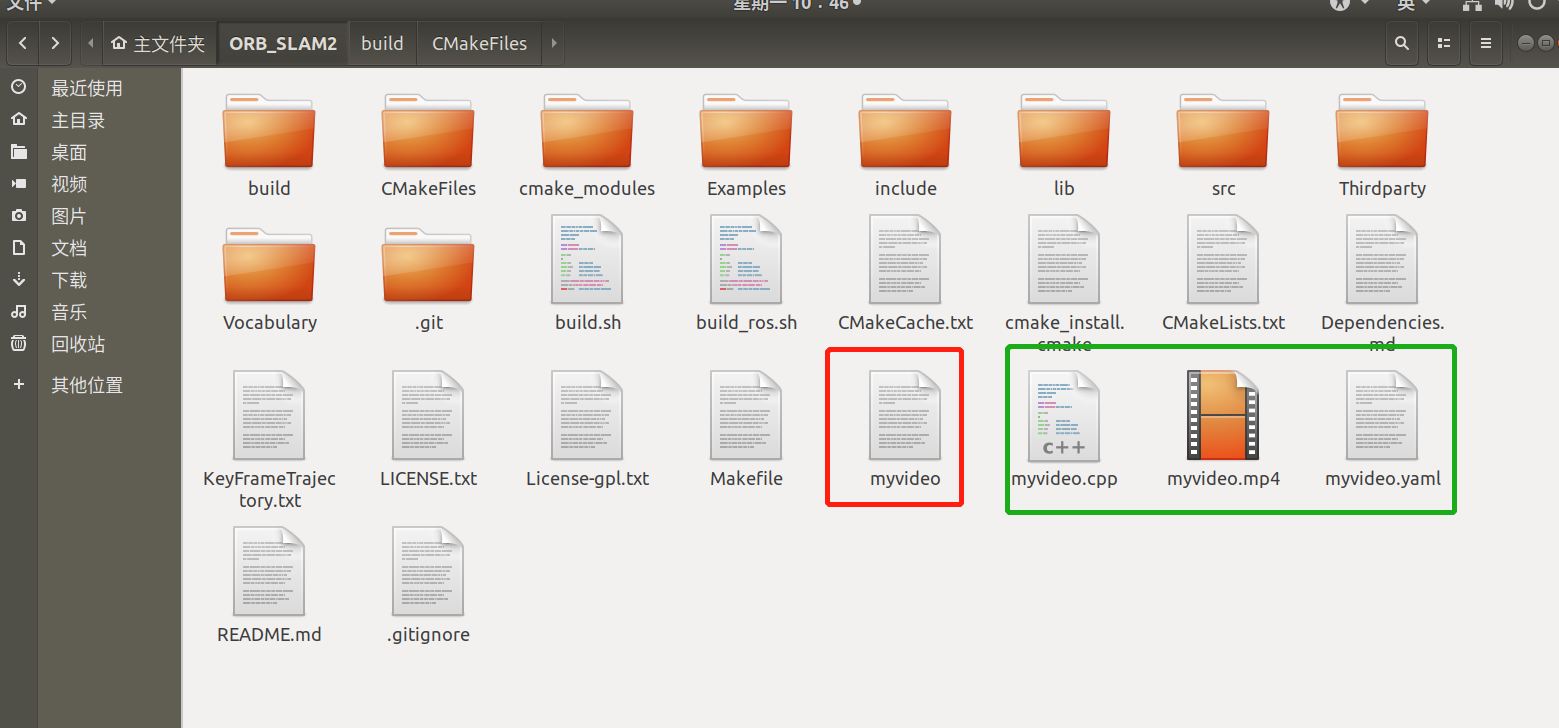
然后需要把他变成以下的样子,绿色框里的是自己建的,红色那个是最后make生成的
现在具体操作步骤如下
步骤一:
 该文详细介绍了如何在Ubuntu18.04环境下配置和运行ORB_SLAM2,包括创建myvideo.yaml配置文件以适应手机摄像头参数,编写myvideo.cpp来处理视频流,以及调整CMakeLists.txt以构建可执行文件,并最终运行系统进行场景定位。
该文详细介绍了如何在Ubuntu18.04环境下配置和运行ORB_SLAM2,包括创建myvideo.yaml配置文件以适应手机摄像头参数,编写myvideo.cpp来处理视频流,以及调整CMakeLists.txt以构建可执行文件,并最终运行系统进行场景定位。
我是之前跑通一个例程,运行官方的数据集,具体,可以看我之前的博客。
环境:ubuntu 18.04 ORB_SLAM2
首先打开ORB-SLAM2文件夹,样子刚开始为以下
然后需要把他变成以下的样子,绿色框里的是自己建的,红色那个是最后make生成的
步骤一:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2737
2737





