






💥1 概述
无人机FMCW毫米波高度计雷达仿真是指利用仿真软件或工具,模拟FMCW(频率调制连续波)毫米波雷达在无人机上的应用,用于测量高度信息。首先需要建立FMCW毫米波雷达系统的数学模型,包括雷达发射信号、接收信号、信号处理和距离解算等部分。模型需要考虑雷达天线、波束形成、信号传播、回波接收等各个环节的影响。设定仿真所需的参数,包括雷达工作频率、调制方式、波束宽度、波束方向、采样率等。还需考虑无人机的飞行高度、速度、姿态等参数,以及环境条件如大气压力、温度等对信号传播的影响。通过FMCW毫米波高度计雷达仿真,可以评估无人机在不同高度下的高度测量性能,优化雷达系统参数设计,并为实际应用提供参考和指导。
无人机FMCW毫米波高度计雷达仿真研究是一个涉及无人机技术、雷达技术和仿真技术的综合性研究领域。以下是对该领域的详细阐述:
一、研究背景与意义
无人机在航拍、农业、环境监测、目标跟踪等领域的应用日益广泛,对高度测量的精度和实时性要求也越来越高。FMCW(Frequency Modulated Continuous Wave,调频连续波)毫米波高度计雷达因其高精度、高分辨率和快速响应的特点,成为无人机高度测量的重要技术手段。通过仿真研究,可以评估FMCW毫米波高度计雷达在无人机上的应用性能,优化雷达系统参数设计,并为实际应用提供参考和指导。
二、研究内容
FMCW毫米波雷达基本原理
FMCW雷达通过发射频率随时间线性变化的连续波信号,并接收目标反射回来的回波信号,通过测量发射信号与回波信号之间的频率差来计算目标与雷达之间的距离。
雷达系统包括发射机、接收机、天线、信号处理器等关键部件,需要建立相应的数学模型进行仿真。
无人机FMCW毫米波高度计雷达系统建模
建立无人机FMCW毫米波高度计雷达系统的数学模型,包括雷达发射信号、接收信号、信号处理和距离解算等部分。
模型需要考虑雷达天线、波束形成、信号传播、回波接收等各个环节的影响,以及无人机的飞行高度、速度、姿态等参数。
仿真参数设置
设定仿真所需的参数,包括雷达工作频率、调制方式、波束宽度、波束方向、采样率等。
还需考虑环境条件如大气压力、温度等对信号传播的影响。
仿真实验与结果分析
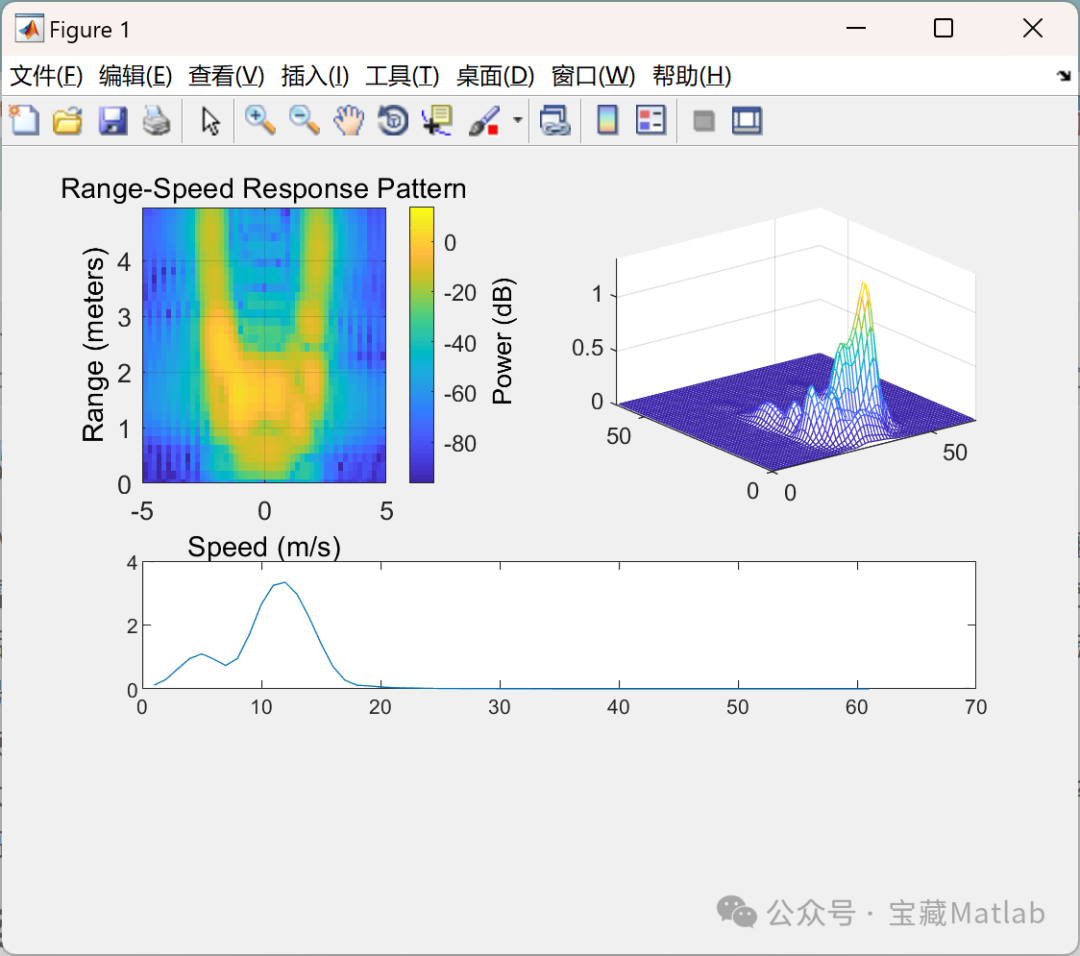
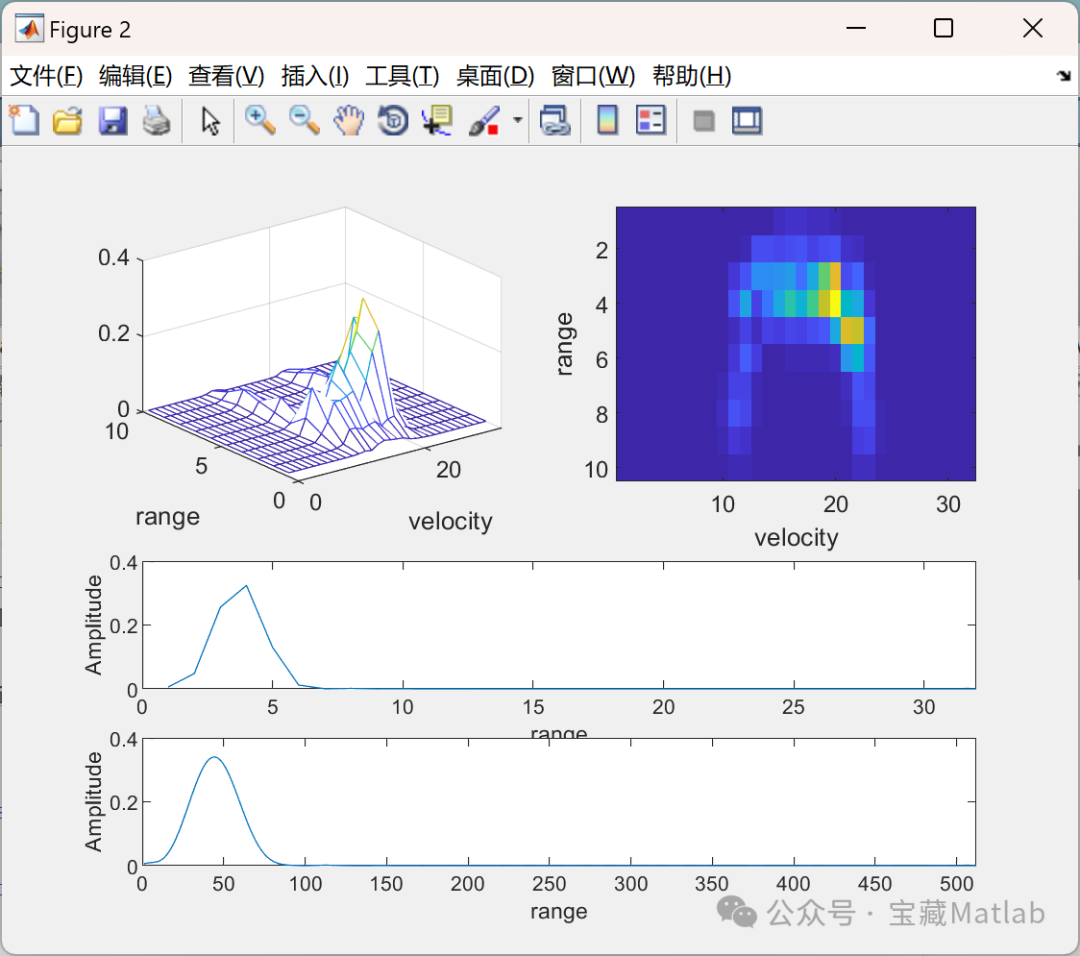
利用仿真软件或工具进行仿真实验,模拟无人机在不同高度、不同飞行姿态下的高度测量过程。
分析仿真结果,评估FMCW毫米波高度计雷达在无人机上的应用性能,包括测量精度、测量范围、响应时间等指标。
系统优化与改进
根据仿真结果,对雷达系统参数进行优化设计,以提高测量精度和实时性。
探索新的信号处理算法和雷达架构,以进一步提升系统性能。
三、应用前景
无人机FMCW毫米波高度计雷达仿真研究对于推动无人机技术的发展具有重要意义。通过仿真研究,可以深入了解FMCW毫米波雷达在无人机高度测量中的应用特性,为实际应用提供理论支持和技术指导。同时,随着无人机技术的不断发展,FMCW毫米波高度计雷达将在更多领域得到应用,如无人机避障、地形检测、目标跟踪等,为无人机的安全飞行和任务执行提供有力保障。
综上所述,无人机FMCW毫米波高度计雷达仿真研究是一个具有广泛应用前景和重要研究价值的领域。通过深入研究和实践应用,可以不断提升无人机的高度测量性能和应用水平。
📚2 运行结果
部分代码:
clc;clear%% Radar Parametersfc = 24e9;c = physconst('LightSpeed');lambda = c/fc;tm = 5e-4; % Chirp Cyclebw = 300e6; % FMCW Bandwidthrange_max = 5; % Max detection Range 1~100 metersv_max = 2.5; % Max Velocity%range_res = c/2/bw;sweep_slope = bw/tm;fr_max = range2beat(range_max,sweep_slope,c);fd_max = speed2dop(2*v_max,lambda);fb_max = fr_max+fd_max;fs = max(2*fb_max,bw);%%%% Use Phased Array System Toolbox to generate an FMCW waveformwaveform = phased.FMCWWaveform('SweepTime',tm,'SweepBandwidth',bw,...'SampleRate',fs);%%tx_antenna = phased.IsotropicAntennaElement('FrequencyRange',[23.8e9 24.4e9],'BackBaffled',true);rx_antenna = phased.IsotropicAntennaElement('FrequencyRange',[23.8e9 24.4e9],'BackBaffled',true);%%transmitter = phased.Transmitter('PeakPower',0.001,'Gain',20);receiver = phased.ReceiverPreamp('Gain',20,'NoiseFigure',8.5,'SampleRate',fs);txradiator = phased.Radiator('Sensor',tx_antenna,'OperatingFrequency',fc,...'PropagationSpeed',c);rxcollector = phased.Collector('Sensor',rx_antenna,'OperatingFrequency',fc,...'PropagationSpeed',c);rng(2020);fs_d = 2500000;Dn = fix(fs/fs_d);%%%% --------------Radar Motion Platform-------------- %%radar_s = phased.Platform('InitialPosition',[0;0;0],...'Velocity',[0.05;2.3;-0.04]); %% *********** Set Radar Velocity Here **************%% Targets ------------- Ground -------------------- %%target_ypos = -6:0.15:6;target_num = size(target_ypos,2);target_xpos = 1.3*ones(1,target_num) + 0*1.1*target_ypos; %% *********** Set Ground Shape Here **************target_zpos = zeros(1,target_num);target_pos = [[target_xpos,target_xpos,target_xpos];[target_ypos,target_ypos,target_ypos];[target_zpos-0.15,target_zpos,target_zpos+0.155]];target_num = target_num*3;target_rcs = 0.02*ones(1,target_num);targets_vel = [zeros(1,target_num);zeros(1,target_num);zeros(1,target_num)];targets = phased.RadarTarget('MeanRCS',target_rcs,'PropagationSpeed',c,'OperatingFrequency',fc);targetmotion = phased.Platform('InitialPosition',target_pos,...'Velocity',targets_vel);%%%% Signal Propogation% simulation of free space propagtionchannel = phased.FreeSpace('PropagationSpeed',c,...'OperatingFrequency',fc,'SampleRate',fs,'TwoWayPropagation',true);%%%%% Generate Time Domain Waveforms of Chirps% xr is the data received at rx arrayNsweep = 32; % Number of Chirps (IF signal) of this simulationchirp_len = fix(fs_d*waveform.SweepTime);xr = complex(zeros(chirp_len,1,Nsweep));disp('The simulation will take some time. Please wait...')for m = 1:Nsweepif mod(m,1)==0disp([num2str(m),'/',num2str(Nsweep)])end% Update radar and target positions[radar_pos,radar_vel] = radar_s(waveform.SweepTime);[tgt_pos,tgt_vel] = targetmotion(waveform.SweepTime);[~,tgt_ang] = rangeangle(tgt_pos,radar_pos);% Transmit FMCW waveformsig = waveform();txsig = transmitter(sig);% Toggle transmit elementtxsig = txradiator(txsig,tgt_ang);% Propagate the signal and reflect off the targettxsig = channel(txsig,radar_pos,tgt_pos,radar_vel,tgt_vel);txsig = targets(txsig);% Dechirp the received radar returnrxsig = rxcollector(txsig,tgt_ang);rxsig = receiver(rxsig);dechirpsig = dechirp(rxsig,sig);% Decimate the return to reduce computation requirementsfor n = size(xr,2):-1:1xr(:,n,m) = decimate(dechirpsig(1:chirp_len*Dn,n),Dn,'FIR');endendrange_res = range_res*size(dechirpsig,1)/Dn/size(xr,1);%%xrv = squeeze(xr);save('vrv.mat',...'xrv','fc','fs_d','c','tm','bw','waveform','range_res',...'Nsweep','chirp_len','Dn','fb_max','lambda',...'v_max','range_max')%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Part II: Signal Processing %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%if ~exist('xrv')load('vrv.mat');end% FFT pointsnfft_r = 2^nextpow2(size(xrv,1));nfft_d = 2^nextpow2(size(xrv,2));nfft_mul = 2;ra_res = range_res*size(xrv,1)/nfft_mul/nfft_r;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]李二飞.无人机在消防救援中的应用研究[J].中国设备工程,2024(07):40-43.
[2]陆宗明.植保无人机雾滴飘移测试试验台设计及飘移性能分析[J].南方农机,2024,55(07):70-72.
🌈4 Matlab代码实现

















 537
537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









