



策略梯度、Actor-Critic算法
策略梯度方法
将策略𝜋参数化为𝜋𝜃(𝑎|𝑠)
使得策略变成一个处处可微的概率分布
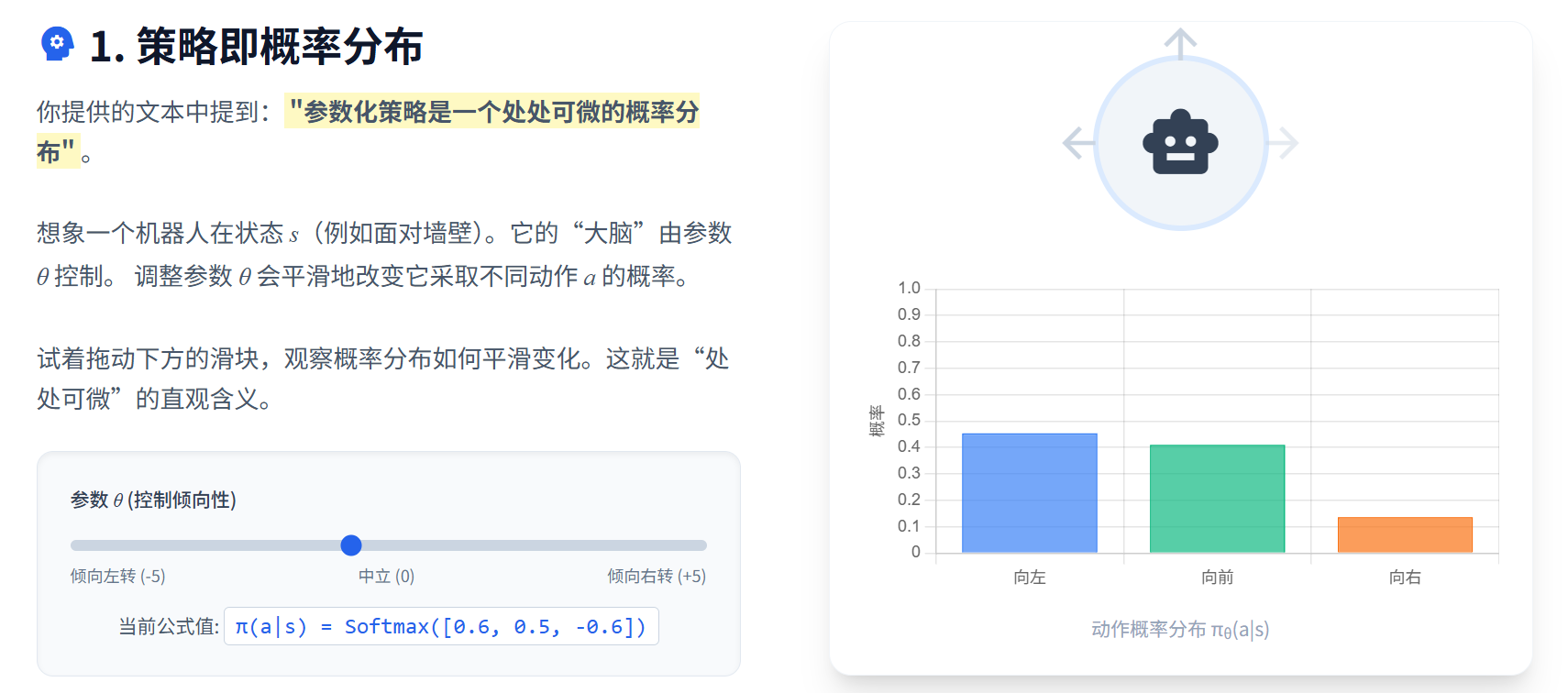
只要能定义出目标函数𝐽(𝜋𝜃)并求出其梯度∇𝜃𝐽(𝜋𝜃),就能利用梯度下降法来更新参数𝜃,从而使得策略𝜋𝜃逐步逼近最优策略𝜋∗。
最大化长期回报
1、基于轨迹概率密度方式
2、基于平稳分布或状态分布方式,占用测度推导
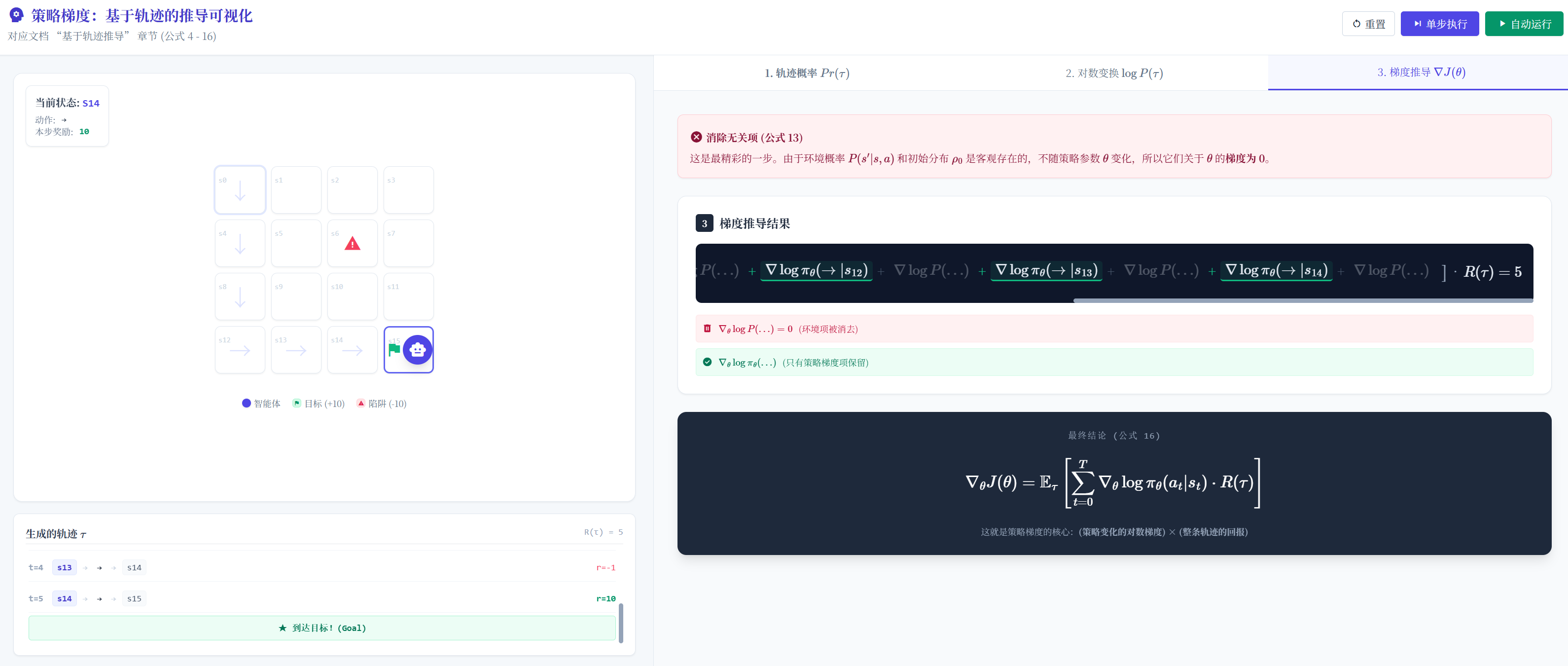
基于轨迹推导
完整的有限步数的交互过程,称为一个 回合( episode ),回合最大步数用 𝑇 表示 (也叫作 Horizon ②)。把所有状态、动作和奖励组合起来的一个序列,称为 轨迹( trajectory ),如式 所示。
τ={s0,a0,r0,s1,a1,r1,⋯ ,sT,aT,rT} \tau=\left\{s_{0},a_{0},r_{0},s_{1},a_{1},r_{1},\cdots,s_{T},a_{T},r_{T}\right\} τ={s0,a0,r0,s1,a1,r1,⋯,sT,aT,rT}
轨迹的概率计算过程,状态→状态对应概率→依据策略采样出动作→状态转移概率到下一个状态→状态对应概率
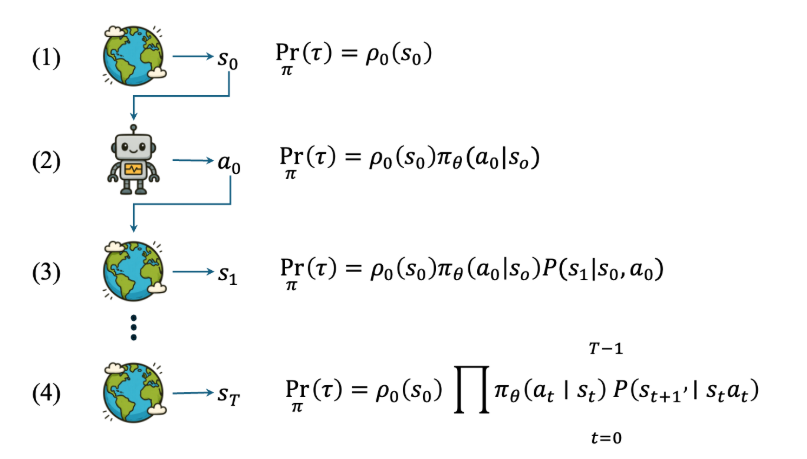
完整轨迹公式
Prπ(τ)=ρ0(s0)∏t=0T−1πθ(at∣st)P(st+1∣st,at) \Pr_{\pi}(\tau)=\rho_0(s_0)\prod_{t=0}^{T-1}\pi_\theta(a_t|s_t)P(s_{t+1}|s_t,a_t) πPr(τ)=ρ0(s0)t=0∏T−1πθ(at∣st)P(st+1∣st,at)
可以看出,轨迹概率确实可以写成关于策略𝜋𝜃(𝑎|𝑠)或者策略参数𝜃的函数,如式所示。
Prπ(τ)=pθ(τ) \Pr_{\pi}(\tau) = p_{\theta}(\tau) πPr(τ)=pθ(τ)
给定策略可能产生很多种轨迹,上面的概率密度变成全概率公式
记每条的轨迹对应的回报为𝑅(𝜏),根据全概率公式可知,目标函数𝐽(𝜋𝜃)可以表示为轨迹概率密度与对应回报的乘积在所有轨迹上的积分,如式所示。
J(πθ)=∫τpθ(τ)R(τ)dτ=Eτ∼pθ(τ)[R(τ)] J(\pi_\theta) = \int_{\tau} p_\theta(\tau) R(\tau) d\tau = \mathbb{E}_{\tau \sim p_\theta(\tau)}[R(\tau)] J(πθ)=∫τpθ(τ)R(τ)dτ=Eτ∼pθ(τ)[R(τ)]
占用测度推导
回顾状态价值相关部分,设环境初始状态为𝑠0,那么目标函数𝐽(𝜋)可以表示为初始状态分布𝜌0与对应状态价值𝑉𝜋(𝑠0)的乘积在所有初始状态上的积分,如式所示。
J(π)=∫s0ρ0(s0)Vπ(s0)ds0=Es0∼ρ0[Vπ(s0)] J(\pi) = \int_{s_0} \rho_0(s_0) V^\pi(s_0) ds_0 = \mathbb{E}_{s_0 \sim \rho_0}[V^\pi(s_0)] J(π)=∫s0ρ0(s0)Vπ(s0)ds0=Es0∼ρ0[Vπ(s0)]
最终可推导为
J(πθ)=∫s0ρ0(s0)∑aπθ(a∣s0)Qπθ(s0,a)ds0 J(\pi_\theta) = \int_{s_0} \rho_0(s_0) \sum_a \pi_\theta(a|s_0) Q^{\pi_\theta}(s_0, a) ds_0 J(πθ)=∫s0ρ0(s0)a∑πθ(a∣s0)Qπθ(s0,a)ds0
实际上初始状态分布𝜌0会影响智能体后续的状态访问分布(statevisitationdistribution),进而影响目标函数𝐽(𝜋𝜃)的值。
因此,在计算梯度 ∇𝜃𝐽(𝜋𝜃) 时,不能简单地将初始状态分布 𝜌0 视为常数项。为此,需要引入 平稳分布( stationarydistribution ) 的概念来更好地理解状态访问分布与策略参数 𝜃 之间的关系。
平稳分布
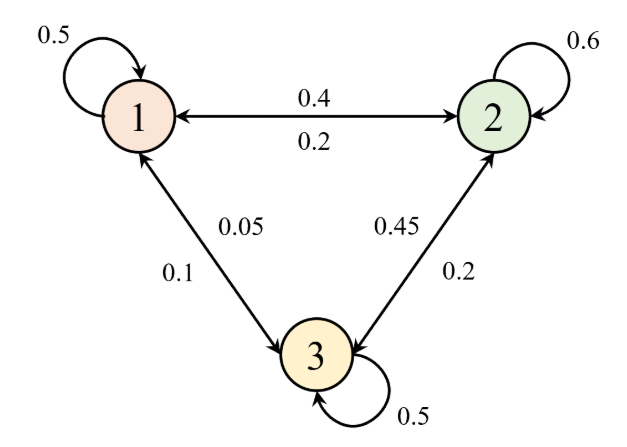
简单来说,它描述了系统在长期运行后,处于各状态的概率分布。需要注意的是,平稳分布的存在是有前提条件的,必须是遍历(ergodic)的马尔可夫过程,遍历包含两个性质:不可约(irreducible)和非周期(aperiodic)。不可约表示从任意状态出发,都有可能到达其他任意状态,有时也叫作连通性(communicative);非周期表示系统不会陷入某种固定的循环模式。而通常情况下,强化学习中的马尔可夫过程都是遍历的,因此平稳分布是存在的。
策略梯度的通用表达式
g=E[∑t=0∞Ψt∇θlogπθ(at∣st)] g = \mathbb{E} \left[ \sum_{t=0}^{\infty} \Psi_t \nabla_\theta \log \pi_\theta(a_t | s_t) \right] g=E[t=0∑∞Ψt∇θlogπθ(at∣st)]
Actor-Critic算法
| 算法类别 | 代表算法 | 主要优点/成效 | 主要缺点/局限性 | 核心改进思路 |
|---|---|---|---|---|
| 基于价值 (Value-Based) | DQN 系列 | 在很多任务中取得了不错的效果。 | 1\. 只能处理**确定性策略**。 2\. 难以适配**连续动作空间**。 3\. 在某些复杂任务中表现不佳。 | N/A |
| 纯策略梯度 (Pure Policy Gradient) | REINFORCE | 在一定程度上解决了确定性策略和连续动作空间的问题。 | 1\. 存在**高方差**。 2.**采样效率低**。 3\. 难以在复杂环境中取得良好效果。 | 直接对策略函数进行参数化。 |
| Actor-Critic | Actor-Critic | **兼顾了前两者的优点**(既解决了动作空间问题,又试图缓解方差和效率问题)。 | **结合策略梯度和值函数**: 不仅将策略函数参数化,同时也将值函数参数化。 |
为了兼顾策略梯度算法的灵活性和基于价值算法的高效性,Actor-Critic算法应运而生,即将值估计的这部分工作交给一个独立的网络(Critic),而策略部分(Actor)则专注于策略的优化。这样不仅可以利用值函数来提供更稳定的梯度估计,还能提高采样效率,从而在复杂任务中取得更好的效果。
算法架构
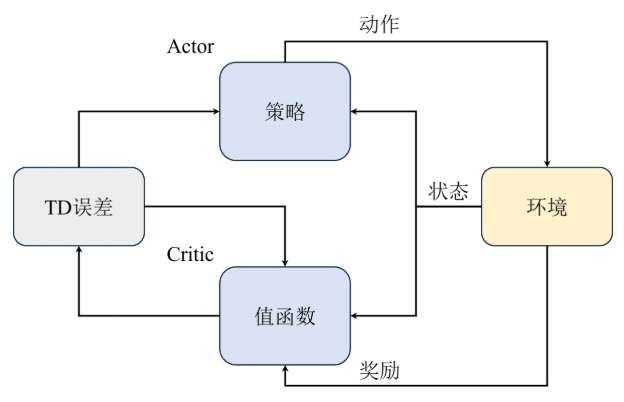
Critic有多种形式:
1、使用状态价值函数Vπ(st)V^{\pi}(s_{t})Vπ(st)来估计当前状态的价值
2、使用状态-动作值函数Qπ(st,at)Q^{\pi}(s_{t}, a_{t})Qπ(st,at)来估计当前状态-动作对的价值。
使用状态价值函数来表示 Actor-Critic 算法的形式通常被称为 ValueActor-Critic 算法,如式所示。
∇θJ(θ)∝Eπθ[Vω(st)∇θlogπθ(at∣st)] \nabla_{\theta} J(\theta) \propto \mathbb{E}_{\pi_{\theta}} \left[ V_{\omega}(s_t) \nabla_{\theta} \log \pi_{\theta}(a_t | s_t) \right] ∇θJ(θ)∝Eπθ[Vω(st)∇θlogπθ(at∣st)]
在参数更新方面,对于策略网络( Actor )的参数 𝜃 ,更新方式跟纯策略梯度算法类似,如式所示。
θ←θ+αVω(si)∇θlogπθ(ai∣si) \begin{aligned}\\\theta \leftarrow \theta + \alpha V_{\omega}(s_i) \nabla_{\theta} \log \pi_{\theta}(a_i | s_i)\\\end{aligned} θ←θ+αVω(si)∇θlogπθ(ai∣si)
对于值函数网络(Critic),可以先计算时序差分误差的梯度表达式,然后利用该误差来更新值函数的参数,如式所示。
∇ωL(ω)=(rt+γVω(st+1)−Vω(st))∇ωVω(st) \nabla_{\omega} L(\omega) = (r_t + \gamma V_{\omega}(s_{t+1}) - V_{\omega}(s_t)) \nabla_{\omega} V_{\omega}(s_t) ∇ωL(ω)=(rt+γVω(st+1)−Vω(st))∇ωVω(st)
在上式基础上,我们可以通过梯度下降的方法来更新值函数的参数𝜔,如下式所示。
yi=ri+γVω(si+1)−Vω(si)ω←ω+βyi∇ωVω(si) \begin{aligned}\\y_i &= r_i + \gamma V_\omega(s_{i+1}) - V_\omega(s_i) \\\\\omega &\leftarrow \omega + \beta y_i \nabla_\omega V_\omega(s_i)\\\end{aligned} yiω=ri+γVω(si+1)−Vω(si)←ω+βyi∇ωVω(si)
使用状态-动作值函数来表示Actor-Critic算法的形式通常被称为QActor-Critic算法,如式所示。
∇θJ(θ)∝Eπθ[Qω(s,a)∇θlogπθ(a∣s)] \nabla_{\theta} J(\theta) \propto \mathbb{E}_{\pi_{\theta}} \left[ Q_{\omega}(s, a) \nabla_{\theta} \log \pi_{\theta}(a \mid s) \right] ∇θJ(θ)∝Eπθ[Qω(s,a)∇θlogπθ(a∣s)]
同样地,Critic网络的参数𝜔也可以通过时序差分方法来更新,其梯度表达式如式所示。
∇ωL(ω)=Eπθ[(rt+γQω(st+1,at+1)−Qω(st,at))∇ωQω(st,at)] \nabla_{\omega} L(\omega) = \mathbb{E}_{\pi_{\theta}} \left[ (r_t + \gamma Q_{\omega}(s_{t+1}, a_{t+1}) - Q_{\omega}(s_t, a_t)) \nabla_{\omega} Q_{\omega}(s_t, a_t) \right] ∇ωL(ω)=Eπθ[(rt+γQω(st+1,at+1)−Qω(st,at))∇ωQω(st,at)]
A2C算法
引入优势函数,进一步提高梯度估计的稳定性和准确性
Aπ(st,at)=Qπ(st,at)−Vπ(st) A^{\pi}(s_{t}, a_{t}) = Q^{\pi}(s_{t}, a_{t}) - V^{\pi}(s_{t}) Aπ(st,at)=Qπ(st,at)−Vπ(st)
相当于引入一个基线

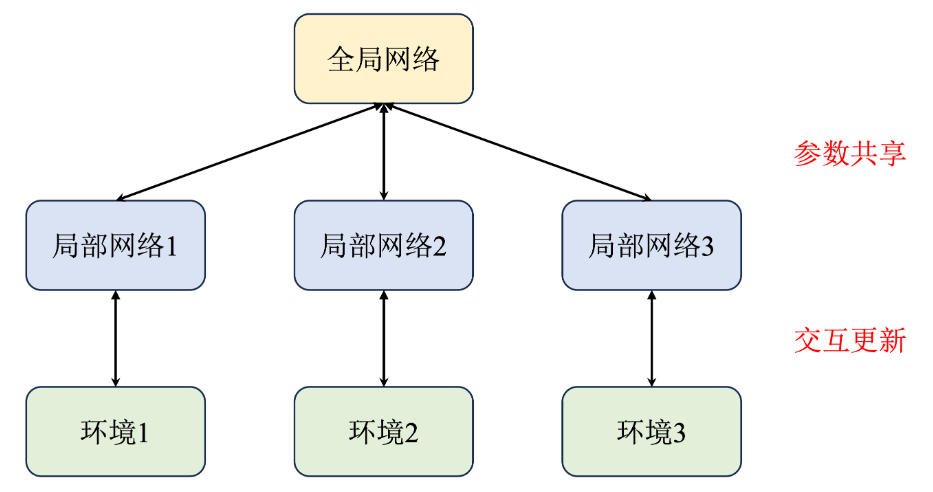
A3C算法
A3C算法通过引入多个并行的智能体(进程),每个智能体都拥有独立的策略和价值网络,并与环境进行交互采样数据。每个智能体在与环境交互一段时间后,会将其参数异步地更新到全局网络中,从而实现多进程的协同训练。
每一个智能体(进程)都拥有一个独立的网络和环境以供交互,并且每个进程每隔一段时间都会将自己的参数同步到全局网络中,这样就能提高训练效率。
参考文献
https://datawhalechina.github.io/joyrl-book/#/rl_basic/ch9/
https://datawhalechina.github.io/joyrl-book/#/rl_basic/ch10/

















 1062
1062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









