




题目:
有 n 个网络节点,标记为 1 到 n。
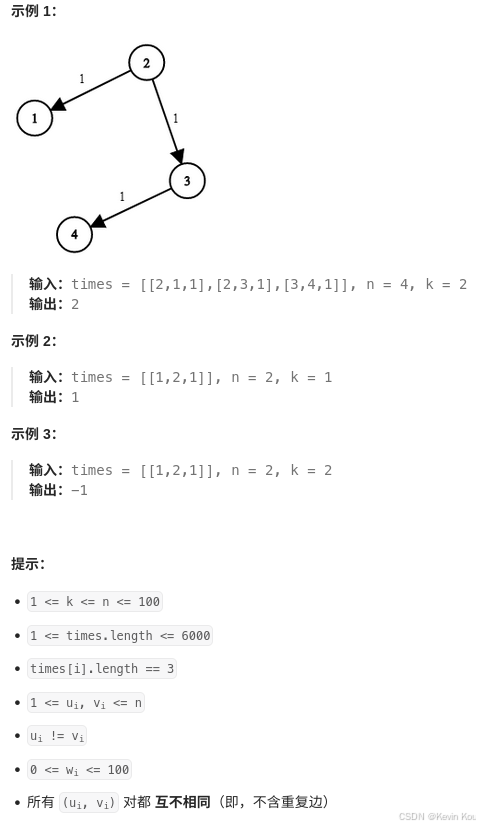
给你一个列表 times,表示信号经过 有向 边的传递时间。 times[i] = (ui, vi, wi),其中 ui 是源节点,vi 是目标节点, wi 是一个信号从源节点传递到目标节点的时间。
现在,从某个节点 K 发出一个信号。需要多久才能使所有节点都收到信号?如果不能使所有节点收到信号,返回 -1 。
前言:
本题需要用到单源最短路径算法Dijkstra,其主要思想是贪心。将所有节点分成两类:已确定从起点到当前点的最短路径长度的节点,以及未确定从起点到当前点的最短路径长度的节点(下面简称【未确定的节点】和【已确定的节点】)。
每次从【未确定节点】中取一个与起点距离最短的点,将它归类为【已确定节点】,并用它【更新】从起点到其他所有【未确定节点】的距离。直到所有点都被归类为【已确定节点】。用节点A【更新】节点B的意思是,用起点到节点A的最短路长度加上节点A到节点B的边的长度,去比较起点到节点B的最短路长度,如果前者小于后者,就用前者更新后者。
每次选择【未确定节点】时,起点到它的最短路径的长度可以被确定。可以这样理解,我们已经用了每一个【已确定节点】更新过了当前节点,无需再次更新(因为一个点不能多次到达)。而当前节点已经是所有【未确定节点】中与起点距离最短的点,不可能被其他【未确定节点】更新。所以当前节点可以被归类为【已确定节点】。
解法一(鲁棒遍历):
class Solution {
public:
int networkDelayTime(vector<vector<int>>& times, int n, int k) {
int index = 0;
//number为节点到k最近的距离,初始值均为10000000
vector<int> number(100,10000000);
//定义hashTable1统计每个节点传输到另一个节点以及距离
unordered_map<int, vector<vector<int>>> hashTable1;
for(int i=0; i<times.size();i++){
vector<int> a;
a.push_back(times[i][1]);
a.push_back(times[i][2]);
hashTable1[times[i][0]].push_back(a);
}
//初始化初始节点的值k
number[k]=0;
auto it = hashTable1.find(k);
//定义未访问更新的节点hashTable2的索引值
vector<int> hashTable2 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1355
1355

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









