







 超级会员免费看
超级会员免费看
 栅格法是AGV规划路径中建立环境地图的常见方法,通过将工作环境划分为相等大小的方格来表示。地图的清晰度与栅格大小有关,过小则存储开销大,规划速度慢;过大则环境信息模糊。本文介绍了如何在MATLAB中创建10x10的静态环境地图,其中1表示障碍物,0表示可通行区域,强调了合理设置栅格大小的重要性。
栅格法是AGV规划路径中建立环境地图的常见方法,通过将工作环境划分为相等大小的方格来表示。地图的清晰度与栅格大小有关,过小则存储开销大,规划速度慢;过大则环境信息模糊。本文介绍了如何在MATLAB中创建10x10的静态环境地图,其中1表示障碍物,0表示可通行区域,强调了合理设置栅格大小的重要性。
欢迎来到 < Haoh-Smile > 的博客,觉得受用客官就点个赞评论一下呗!
栅格法建立环境地图
1.在AGV规划路径时首先要获取环境信息,建立环境地图,合理的环境表示有利于建立规划方法和选择合适的搜索算法,最终实现较少的时间开销而规划出较为满意的路径。建立环境地图的方式有很多,例如可视图法,自由空间法,拓扑法,栅格法等等,下面主要介绍栅格法在静态环境下如何建立环境地图。
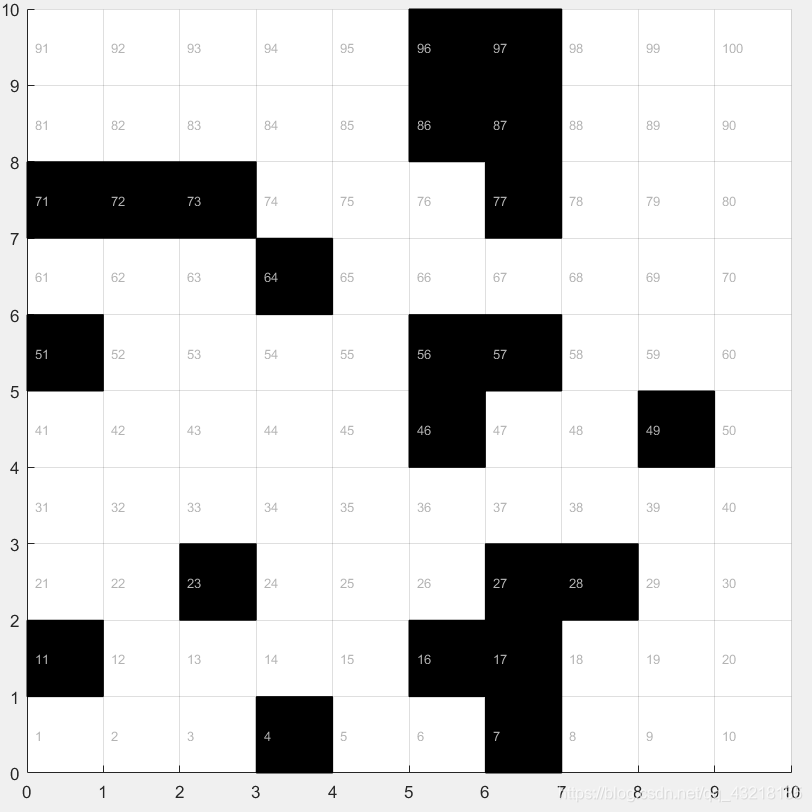
2.栅格法是地图建模的一种方法,栅格法实质上是将AGV的工作环境进行单元分割,将其用大小相等的方块表示出来,这样栅格大小的选取是影响规划算法性能的一个很重要的因素。栅格较小的话,由栅格地图所表示的环境信息将会非常清晰,但由于需要存储较多的信息,会增大存储开销,同时干扰信号也会随之增加,规划速度会相应降低,实时性得不到保证;反之,由于信息存储量少,抗干扰能力有所增强,规划速随之增快,但环境信息划分会变得较为模糊,不利于有效路径的规划。在描述环境信息时障碍物所在区域在栅格地图中呈现为黑色,地图矩阵中标为1,可自由通行区域在栅格地图中呈现为白色,地图矩阵中标为0。路径规划的目的就是在建立好的环境地图中找到一条最优的可通行路径,所以使用栅格法建立环境地图时,栅格大小的合理设定非常关键。
话不多说,我们建立下面10乘10的静态环境地图
<

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2506
2506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











