






点击上方“小白学视觉”,选择加"星标"或“置顶”
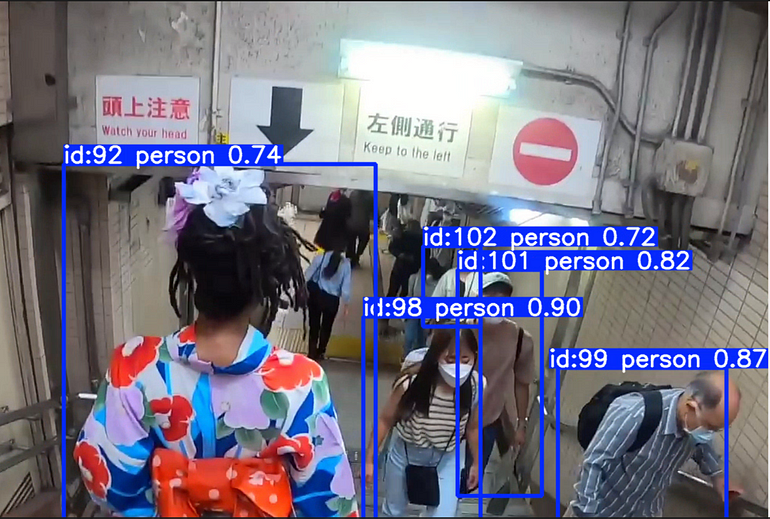
重磅干货,第一时间送达在计算机视觉领域,实时跟踪和统计人数对于各种应用至关重要,从监控到事件管理。在这篇博客文章中,我们将探讨如何利用YOLOv8和ByteTracker实现准确的人数统计。
引言
YOLOv8(You Only Look Once,第八版)是一种以其速度和准确性而闻名的最新对象检测模型。
ByteTracker是一种先进的跟踪算法,旨在维持对象在帧之间的身份,使其成为执行人数统计等任务的理想选择。
这种组合不仅允许我们在帧中检测到人,而且还能够跟踪他们在帧之间的移动,为实时人数统计提供了强大的解决方案。
先决条件
在深入实现之前,请确保您具备以下条件:
Python 3.10
Ultralytics
设置环境
首先,创建并激活虚拟环境以管理依赖项:
conda create -n person-tracker python==3.10
conda activate person-tracker安装必要的库:
pip install ultralytics实现人数统计
1. 导入库从导入所需的库开始:
from ultralytics import YOLO
from datetime import datetime
import os2. 定义PersonTracker类
创建一个PersonTracker类,该类集成了用于检测的YOLOv8和用于跟踪的ByteTracker:
class PersonTracker:
def __init__(self, model_path, result_dir='results/', tracker_config="bytetrack.yaml", conf=0.5, device='cuda:0',
iou=0.5, img_size=(720, 1080)):
self.model = YOLO(model_path)
self.result_dir = result_dir
self.tracker_config = tracker_config
self.conf = conf
self.device = device
self.iou = iou
self.img_size = img_size
def create_result_file(self):
folder_name = datetime.now().strftime("%Y-%m-%d-%H-%M-%S")
result_file_path = os.path.join(self.result_dir, folder_name + ".txt")
os.makedirs(self.result_dir, exist_ok=True)
with open(result_file_path, 'w') as file:
file.write(folder_name + "\n")
return result_file_path
def detect_and_track(self, source, show=True, logger=None):
result_file = self.create_result_file()
person_count = 0
previous_person_count = 0
results = self.model.track(
source, show=show, stream=True, tracker=self.tracker_config, conf=self.conf,
device=self.device, iou=self.iou, stream_buffer=True, classes=[0], imgsz=self.img_size
)
for i, result in enumerate(results):
boxes = result.boxes
try:
id_count = boxes.id.int().tolist()
max_id = max(id_count)
if max_id > person_count:
person_count = max_id
if person_count != previous_person_count:
previous_person_count = person_count
with open(result_file, 'a') as filewrite:
filewrite.write(f"Person count: {person_count}\n")
if logger:
logger.info(f"Person count: {person_count}")
except Exception as e:
pass3. 运行人员跟踪器
视频文件跟踪
if __name__ == '__main__':
source = "path/to/your/video.mp4"
tracker = PersonTracker(model_path='path/to/yolov8_model.pt')
tracker.detect_and_track(source=source)网络摄像头跟踪
if __name__ == '__main__':
source = 0 # Use 0 for the default webcam
tracker = PersonTracker(model_path='path/to/yolov8_model.pt')
tracker.detect_and_track(source=source)RTSP流跟踪
if __name__ == '__main__':
source = 'rtsp://username:password@ip_address:port/path'
tracker = PersonTracker(model_path='path/to/yolov8_model.pt')
tracker.detect_and_track(source=source)支持的模型
对于YOLOv8,模型通常根据它们的准确性和速度权衡进行分类。通常支持以下模型:
YOLOv8n(Nano):提供高速度和较低的准确性。非常适合处理速度的实时应用
YOLOv8s(Small):平衡速度和准确性。适用于许多实际应用。
YOLOv8m(Medium):在速度和准确性之间提供良好的权衡。适用于更苛刻的应用。
YOLOv8l(Large):高准确性,速度较低。最适合准确性为优先考虑的场景。
结论
通过结合YOLOv8和ByteTracker,您可以有效地在帧之间检测和跟踪人员,提供准确的计数和有价值的洞察。这个解决方案可以扩展到需要实时个人监控和分析的各种应用。
参考文献
YOLOv8文档:https://docs.ultralytics.com/
ByteTracker论文:https://arxiv.org/abs/2005.03659
源码:https://github.com/ishworrsubedii/person_tracker
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
















 388
388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









