







 本文介绍了一个使用ROS和OpenCV进行实时图像处理的项目,包括从摄像头读取图像、转换为灰度图、创建直方图并进行图像均衡化处理。通过分析图像的灰度分布,实现了图像对比度的增强。
本文介绍了一个使用ROS和OpenCV进行实时图像处理的项目,包括从摄像头读取图像、转换为灰度图、创建直方图并进行图像均衡化处理。通过分析图像的灰度分布,实现了图像对比度的增强。
//
// Created by chrisliu on 2019/9/22.
//
#include "ros/ros.h"
#include <iostream>
#include <opencv2/opencv.hpp>
#include <algorithm>
using namespace std;
using namespace cv;
int main(int argc, char **argv) {
VideoCapture capture;
capture.open(0);//打开相机
ROS_WARN("*****START");
ros::init(argc, argv, "histogram");//初始化ROS节点
ros::NodeHandle n;
if (!capture.isOpened())
{
printf("摄像头没有正常打开,重新插拔工控机上当摄像头\n");
return 0;
}
Mat frame;//当前帧图片
while (ros::ok()) {
capture.read(frame);
if(frame.empty())
{
break;
}
//读图测试
// frame = imread("woniu.jpg");
Mat greyImage;
//将RGB转化为灰度图
cvtColor(frame, greyImage, CV_RGB2GRAY);
imshow("src", greyImage);
//该数组用于记录灰度像素个数
int grey[256];
//将数组归0
memset(grey, 0, sizeof(grey));
// cout << sizeof(grey) << endl;
// for (int i = 255; i >= 0; i--)
// cout << grey[i] << endl;
int r = greyImage.rows;//行
int c = greyImage.cols;//列
int sum_pixels = r * c;//像素总数
// cout << r * c << endl;
for (int w = r; w > 0; w--)
for (int h = c; h > 0; h--) {
//grey[灰度值]++,遍历完成后可的每个灰度在图像中的个数,存储于数组grey中
grey[greyImage.at<uchar>(w, h)]++;
}
int maxGrey = *max_element(grey, grey + 255);
int minGrey = *min_element(grey, grey + 255);
Mat histogram(256, 256, CV_8U, Scalar(0));
//r的概率
float pro_r[256];
//累计密度
int projectedGrey[256];
// memset(accumulateDensep,0, sizeof(accumulateDensep));
// int pixels = 0;
// float one = 0;
for (int i = 0; i < 256; i++) {
pro_r[i] = (float) grey[i] / sum_pixels;
float temp = 0;
for (int j = 0; j < i + 1; j++) {
temp += pro_r[j];
}
//四舍五入,得到灰度值i映射为accumuDense[i]
//即accumuDense[i]=si=T[i]
projectedGrey[i] = (int) (255 * temp + 0.5);
// pixels += grey[i];
// cout<<frequency[i]<<endl;
// one += frequency[i];
line(histogram, Point(i, 255), Point(i, 255 - 8 * maxGrey * pro_r[i]), Scalar(255));
}
// cout << pixels << endl;
// cout << one << endl;
imshow("histogram", histogram);
//用于均衡化的数组
int balanced[256];
memset(balanced, 0, sizeof(balanced));
float pro_s[256];
Mat accumulate_histogram(256, 256, CV_8U, Scalar(0));
for (int i = 0; i < 256; i++) {
//获取映射后各个灰度值的像素个数
//灰度值为i在原图中像素个数为grey[i]
//i映射为灰度值accumulateDense[i]
//因此将原味i的像素个数归为accumulateDense[i]下
//记灰度值为accumulateDense[i]的像素总数为balanced[si]
balanced[projectedGrey[i]] += grey[i];
// cout<<i<<":"<<accumulateDense[i]<<endl;
}
for (int i = 0; i < 256; i++) {
//获取均衡化后各灰度值的概率
pro_s[i] = (float)balanced[i] / sum_pixels;
// cout<<i<<":"<<balance[i]<<endl;
// cout<<i<<":"<<pro_s[i]<<endl;
line(accumulate_histogram, Point(i, 255), Point(i, 255 - 8 * maxGrey * pro_s[i]), Scalar(255));
}
imshow("accumulate_histogram", accumulate_histogram);
for (int w = 0; w < r; w++)
for (int h = 0; h < c; h++) {
// cout<<(int)greyImage.at<uchar>(w, h)<<endl;
// cout<<accumulateDense[(int)greyImage.at<uchar>(w, h)]<<endl;
//更新均衡化后的每个点的像素
//原(w,h)处的像素=projectedGrey[原灰度值]=si=映射后的灰度值
greyImage.at<uchar>(w, h)=projectedGrey[(int)greyImage.at<uchar>(w, h)];
}
imshow("balanced",greyImage);
ros::spinOnce();
// loop_rate.sleep();
waitKey(5);
}
return 0;
}
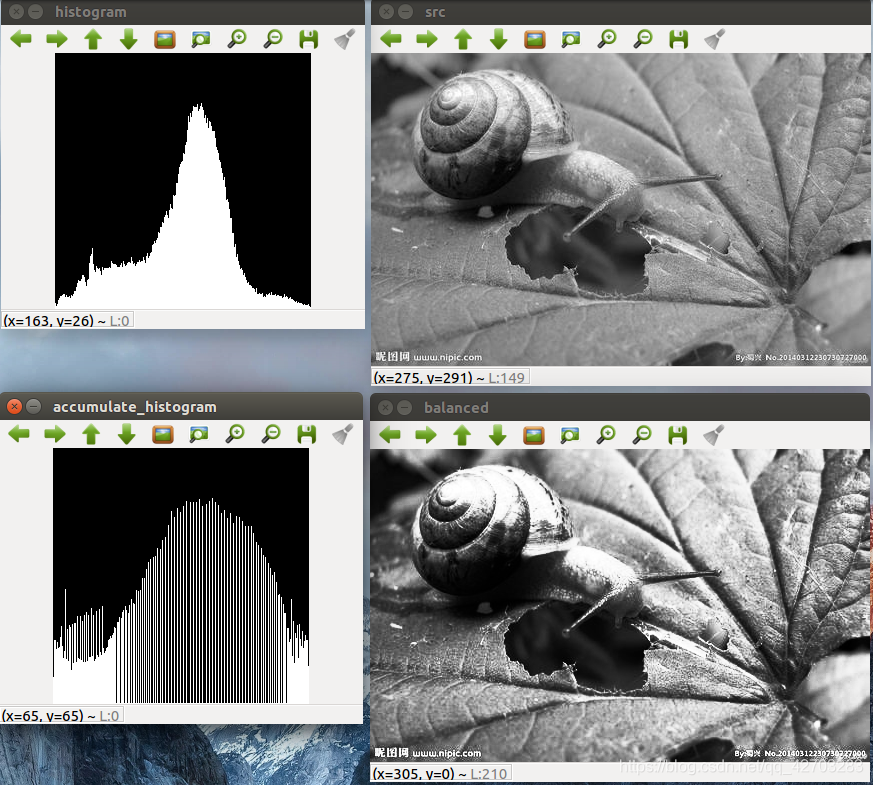
效果如图

















 3904
3904

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









