







1. 立体视差
立体视差 ,亦称立体视像、立体知觉。基于双眼视差所 获得的深度知觉。
立体视差的测量包括三个步骤:
(1)必须从一幅图像中选出位于场景中一个表面上的某一特定位置;
(2)必须在另一幅图像中鉴别出同一个位置;
(3)测出这两个对应像点之间的视差。
在一组重复摄影的两张照片上(立体模式),同一地物的影象,沿着摄影基线(摄影地点和下一个摄影地点之间的飞行方向线)方向位置变换,这个变化量叫“立体视差”。
立体视差在每张照片上,从那点到照片基线(临接摄影地点与照片的摄影地点的像连结的直线),下垂线的足和主点(相片中心)之间叫距离之和。这是把相对两个照片的基线方向,使其成为一直线,按摄影顺序排列时,和相应的同一地物影象间的两个照片主点之间的间隔差。
2. 双目立体视觉
双目立体视觉(Binocular Stereo Vision是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。
为什么双目相机才能得到深度?
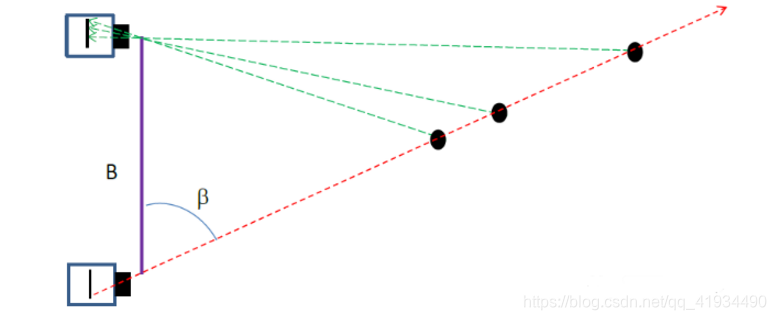
下图从物理原理上展示了为什么单目相机不能测量深度值而双目可以的原因。我们看到红色线条上三个不同远近的黑色的点在下方相机上投影在同一个位置,因此单目相机无法分辨成的像到底是远的那个点还是近的那个点,但是它们在上方相机的投影却位于三个不同位置,因此通过两个相机的观察可以确定到底是哪一个点。
提到双目视觉就不得不提视差图:双目立体视觉融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像。
(对于视差的理解自己可以体验一下:将手指头放在离眼睛不同距离的位置,并轮换睁、闭左右眼,可以发现手指在不同距离的位置,视觉差也不同,且距离越近,视差越大。)
这里再解释一下视差:视差是指在两个摄像机图像之间的像素位置的差异。假设立体视觉相机中的左图像在位置(1,30)具有像素,并且相同的像素在右图像中的位置(4,30)存在,视差值或差值为(4-1)=3。视差值与深度成反比。
深度图:深度图像也叫距离影像,是指将从图像采集器到场景中各点的距离(深度)值作为像素值的图像。获取方法有:激光雷达深度成像法、计算机立体视觉成像、坐标测量机法、莫尔条纹法、结构光法。
点云:当一束激光照射到物体表面时,所反射的激光会携带方位、距离等信息。若将激光束按照某种轨迹进行扫描,便会边扫描边记录到反射的激光点信息,由于扫描极为精细,则能够得到大量的激光点,因而就可形成激光点云。
深度图与点云的区别: 深度图像经过坐标转换可以计算为点云数据;有规则及必要信息的点云数据可以反算为深度图像。 两者在一定条件下是可以相互转化的,之前的博客里,有使用PCL库实现过点云提取深度图,当然给出相机参数也是可以由深度图转为点云的。截图一个深度图:

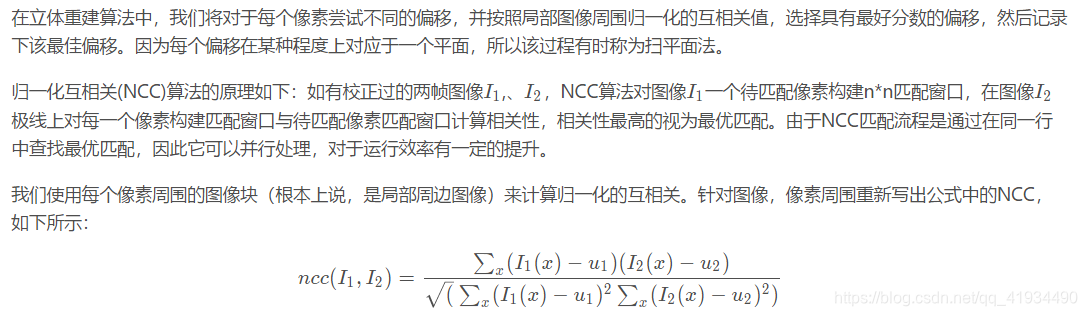
3 归一化互相关(NCC)
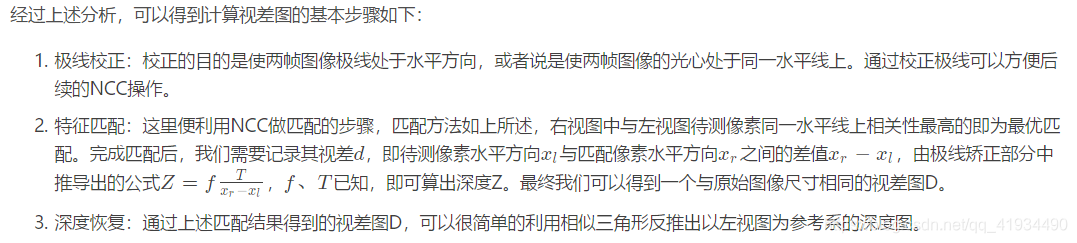
4. 计算视差图的步骤
5 实验代码
import stereo
import scipy.misc
from PIL import Image
from pylab import *
from scipy.ndimage import *
def plane_sweep_ncc(im_l, im_r, start, steps, wid):
# 使用归一化的互相关计算视差图像 """
m, n = im_l.shape
# 保存不同求和值的数组
mean_l = zeros((m, n))
mean_r = zeros( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 514
514

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









