







 本文介绍了TEASER和TEASER++,两个用于3D点云配准的快速且可验证的算法。这两个算法对异常值具有高鲁棒性,能在大规模噪声中进行准确配准。TEASER利用截断最小二乘(TLS)解决非凸优化问题,而TEASER++通过Certifiable GNC算法提高了效率。实验表明,TEASER++在速度和准确性上优于现有方法,如RANSAC和ICP,且能在毫秒级别运行。
本文介绍了TEASER和TEASER++,两个用于3D点云配准的快速且可验证的算法。这两个算法对异常值具有高鲁棒性,能在大规模噪声中进行准确配准。TEASER利用截断最小二乘(TLS)解决非凸优化问题,而TEASER++通过Certifiable GNC算法提高了效率。实验表明,TEASER++在速度和准确性上优于现有方法,如RANSAC和ICP,且能在毫秒级别运行。
原论文:
《TEASER: Fast and Certifiable Point Cloud Registration》
作者及团队:
作者:Heng Yang ,15年清华本科毕业,17年MIT硕士毕业,发文章时为MIT博士生,SPARK实验室,
SPARK实验室主页:http://web.mit.edu/sparklab/
SPARK实验室github主页:https://github.com/mit-spark/
3D点云配准背景:
效果:


视频:https://youtu.be/xib1RSUoeeQ
TEASER阅读笔记
概述:
本文提出了一种可以快速并且可验证的点云配准方法。(及时两组点云之间存在大量的outlier对应关系也能快速并且准确的完成点云配准)
优势:
可提供易于检查的条件,来验证返回的解决方案是否为最优解。
(1) 对噪声的鲁棒性特别的好。
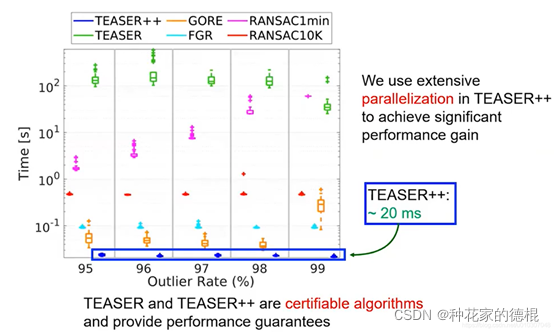
(2) 配准速度较快,以ms级别运行。(作者人为,这是目前最快,最鲁棒的配准方法)作者认为该方法可以在机器人中实时的运行使用。
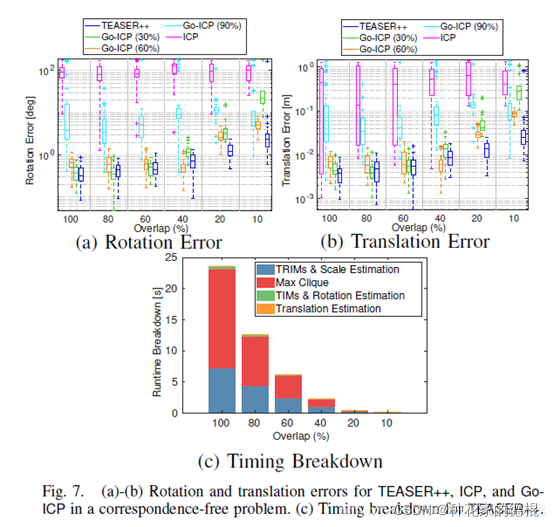
(3) 该配准方法在准确率和鲁棒性上优于现有的其他点云全局配准方法,(RANSAC,ICP和其他启发式算法)。优于ICP,并且比Go-ICP更准确,同时速度又快了几个数量级。
(4) 提供了一种配准性能评估的方法,(附录a)提供一系列的理论证明该算法返回的解的质量。
应用场景:
(1)两组点云配准,(2)可存在大量噪声。
核心思想::
(1) 使用截断最小二乘(Truncated Least Squares) (TLS)cost来重新描述了配准问题。使得该方法对大部分的虚假对应不敏感,但会形成了一个hard,组合的,非凸的最优化问题。
(2) 设置了一个将尺度,旋转和平移解耦的通用图论框架。该算法允许级联求解三个变换,每个子问题(尺度,旋转和平移)在本质上还是非凸优化问题。每个子问题分别求解。 (注:目前在点云配准领域,将旋转和平移解耦的思想是研究热点和常用的思想方案。) 本文的该框架贡献在于,使用一种不变量的测量来估计尺度。 在未知但有界噪声的假设下是解耦形式化。 使用了一种通用的图论框架来推导这些不变的测量值。
文章摘要:(原文的谷歌翻译)
我们提出了第一个快速且可验证的算法,用于在存在大量异常值对应的情况下配准两组 3D 点。 可证明的算法是一种尝试解决棘手的优化问题(例如,具有异常值的稳健估计)并提供易于检查的条件来验证返回的解决方案是否是最优的(例如,如果算法在面对异常值时产生最准确的估计)或限制其次优性或准确性。
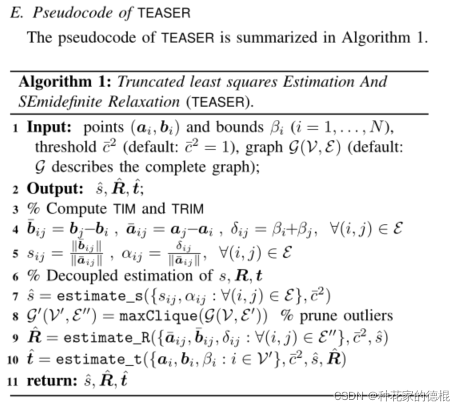
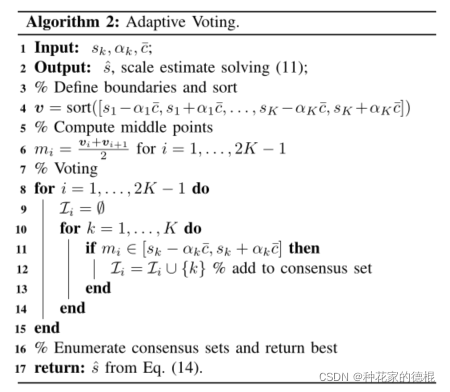
为了实现这一目标,我们首先使用截断最小二乘 (TLS) 成本重新制定配准问题,这使得估计对大部分虚假对应不敏感。 然后,我们提供了一个通用的图论框架来解耦尺度、旋转和平移估计,它允许级联求解三个变换。 尽管事实上每个子问题(尺度、旋转和平移估计)在本质上仍然是非凸的和组合的,但我们表明(i)TLS 尺度和(分量)平移估计可以通过自适应在多项式时间内求解 投票方案,(ii) TLS 旋转估计可以放宽为半定规划 (SDP),并且放宽是严格的,即使存在极端异常值率,并且 (iii) 图论框架允许通过查找来大幅修剪异常值 最大派系。
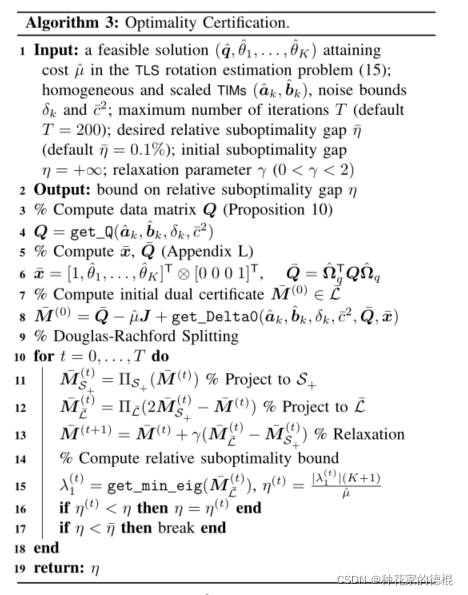
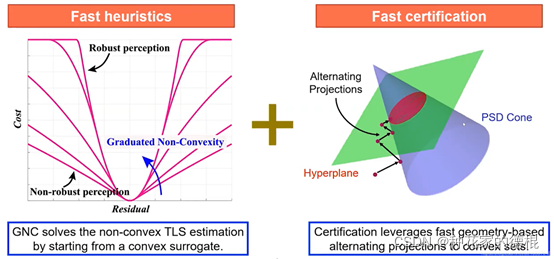
我们将生成的算法命名为 TEASER(截断最小二乘估计和半定松弛)。 虽然求解大型 SDP 松弛通常很慢,但我们开发了第二种快速且可验证的算法,名为 TEASER++,它使用分级非凸性来解决旋转子问题,并利用 DouglasRachford 分裂来有效地验证全局最优性。
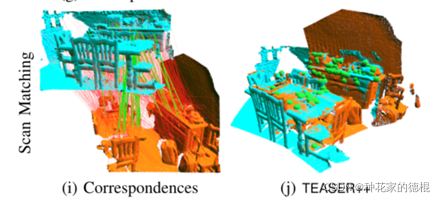
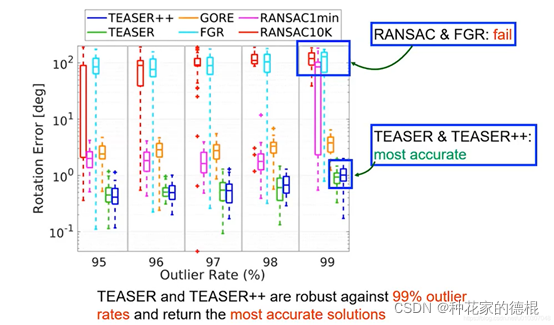
对于这两种算法,我们都提供了估计误差的理论界限,这是针对稳健配准问题的同类算法中的第一个。 此外,我们在标准基准、对象检测数据集和 3DMatch 扫描匹配数据集上测试了它们的性能,并表明 (i) 两种算法都主导了最先进的技术(例如,RANSAC、branch-&-bound、启发式算法)并且是 当规模已知时,对超过 99% 的异常值具有鲁棒性,(ii) TEASER++ 可以在毫秒内运行,它是目前最快的鲁棒配准算法,并且 (iii) TEASER++ 非常鲁棒,它也可以解决没有对应关系的问题(例如,假设 all-to-all 对应),它在很大程度上优于 ICP,并且比 Go-ICP 更准确,同时速度快几个数量级。 我们发布了 TEASER++ 的快速开源 C++ 实现。
算法流程:
详细流程较多,原文叙述很详细。
自己理解版还有待整理。
TEASER 和TEASER++求解子问题对比:
TEASER:
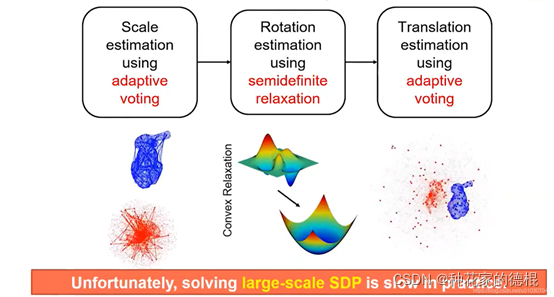
TEASER中采用半定规划(SDP)和凸松弛算法估计旋转部分
TEASER++:
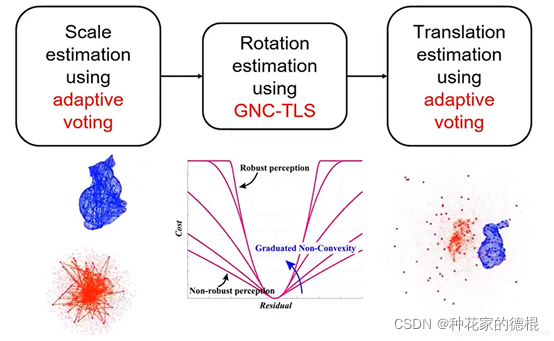
TEASER++采用 Certifiable GNC 算法估计旋转部分,提升了算法效率和可证明能力 .
部分实验结果:
(1)与Fast Global Registration (FGR) 、 Guaranteed Outlier REmoval (GORE)和RANSAC两种变体进行比较。
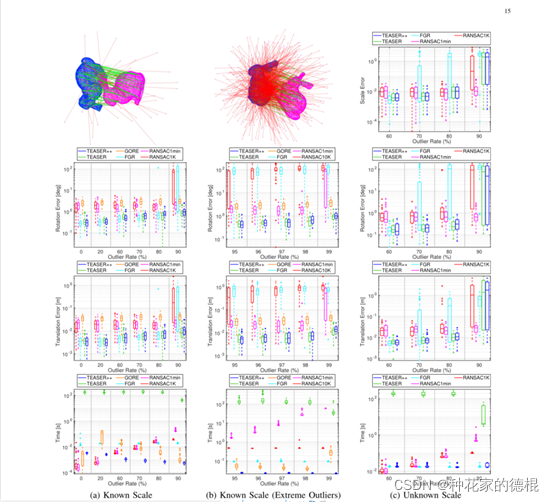
旋转精度:
运行时间:
(2)与ICP的比较:
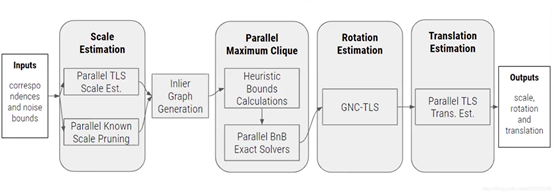
代码整体框架:
(1)输入为两组点云的匹配对和噪声上界
(2)使用adaptive voting进行尺度估计,如果尺度已知,则进行已知尺度修剪外点操作
(3)产生内点图
(4)在内点图中寻找最大团从而选择最大内点集
(5)最大内点集传入GNC-TLS模块进行旋转估计
(6)使用adaptive voting进行平移估计
(7)输出为尺度,旋转和平移
阅读笔记部分内容参考前人大佬,因为自己笔记,方便自己查看,所以没有详细标注,如有侵权,通知删除。
参考大佬连接:
https://blog.youkuaiyun.com/u010307048/article/details/115911129
https://jishuin.proginn.com/p/763bfbd58dbe
https://www.cnblogs.com/louisanu/p/12341140.html

















 3212
3212

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









