







全天候定位是一个麻烦的问题,Agent重定位,自动驾驶有自动驾驶的方法,高速的定位方法是不能主要依赖主动视觉的,低速的方法倒可以。
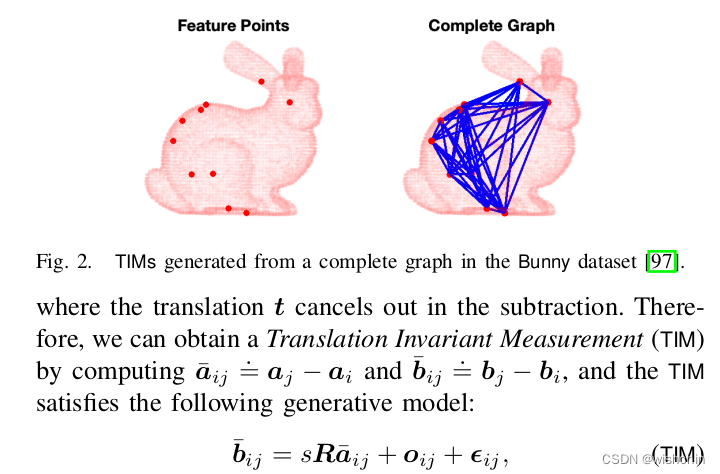
3D点云的Align方法:Teaser++ fast & certifiable 3D registration ,hd_location使用的一个重定位方法,是个非常优秀的3D重定位方法。
论文中和RNASAC、ICP效果对比

3D配准实际效果:
在偏离了原点大概20米的拐角地方,Teaser++重定位位置成功。
box range box center : x is:0 y is:0 z is:0
[ INFO] [1714025281.618713153]: box range box size() : l is:130 w is:130 h is:130
[ INFO] [1714025281.618720805]: box 1 : x is:-65 y is:-65 z is:-65
[ INFO] [1714025281.618728484]: box 2 : x is:65 y is:65 z is:65
[ INFO] [1714025281.618743013]: getCrops: x is:130 y is:130 z is:130
[ INFO] [1714025281.623911746]:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









