







入职新公司短短几个月让我搞遍了整整3种CAN收发器。真的是又爱又恨。。。
目录
唤醒检测情况1:MCU处于断电状态(MCU电源被切断的状态)时进行唤醒源检测。
唤醒检测情况2:MCU处于有电状态(MCU此时一般处于预休眠状态)时进行唤醒源检测。
关于我对CAN收发器理解的历程。
想起2年前刚毕业在公司搞CAN通讯开发。
由于公司项目的平台都是做的非常的完善,所以我都是在CAN的上层搞来搞去,很少有机会从最底层的CAN收发器往上一步步开发。
因为我直接看CAN收发器手册,里面一大堆东西。什么ERR_N脚用来检测什么错误啦、什么温度过高过低啦、什么WakeUpFlag啦、各种乱七八糟的什么的。
这么多功能,到底这么用啊?所以搞了一年半载都没明白收发器到底是干啥的。
后来真正弄过CAN收发器才明白,其实很简单,一般哪有用到手册里面写的那么多功能。平时用到的就两个功能。
第一:CAN通讯(即CAN报文收发)
第二:MCU的休眠唤醒(即通过报文唤醒MCU,无报文时MCU进入休眠)
首先是MCU的CAN通讯。MCU要CAN通讯了,就把收发器切换至正常通讯模式(Normal),MCU不要CAN通讯了,就把收发器切换至其它模式。而所谓的各种收发器模式有什么用,其实简单理解就是正常通讯模式(Normal)收发器能收能发,其它模式收发器不能收不能发(当然,有能收不能发,即Listen-only,但这种模式一般也用不上)。
然后是MCU的休眠唤醒(即报文唤醒)为什么休眠唤醒需要用到CAN收发器呢?一般来说,我们的MCU进入休眠后,MCU唤醒有两种情况:主动唤醒和被动唤醒。关于主动唤醒和被动唤醒不理解的话可以看我前面的一篇文章:Autosar BSW层CAN通讯开发------05(Autosar的CanNM----网管报文在汽车上的作用、“同起同睡”)_嵌软小白呗的博客-优快云博客Autosar的CanNM----网管报文在汽车上的作用 https://blog.youkuaiyun.com/qq_41848098/article/details/125343580 MCU的被动唤醒就需要用到CAN收发器,MCU休眠时,CAN收发器检测到CAN总线出现CAN报文,此时MCU可通过检测CAN收发器(可能是直接读收发器的引脚电平读取是否被CAN报文唤醒、也可能是通过SPI去读取是否被CAN报文唤醒情况),得知是否自己需要被动唤醒。
https://blog.youkuaiyun.com/qq_41848098/article/details/125343580 MCU的被动唤醒就需要用到CAN收发器,MCU休眠时,CAN收发器检测到CAN总线出现CAN报文,此时MCU可通过检测CAN收发器(可能是直接读收发器的引脚电平读取是否被CAN报文唤醒、也可能是通过SPI去读取是否被CAN报文唤醒情况),得知是否自己需要被动唤醒。
由于用收发器实现MCU的休眠唤醒比较复杂,本文简单讲一下,详细MCU休眠唤醒可看下一篇文章。
接下来我从MCU工作时需要用到CAN收发器什么功能,进而去讲CAN收发器的功能和使用方法。我觉得从这个角度会更容易理解CAN收发器(即知道了需求,自然就知道我们的产品是什么了)。
什么是CAN收发器
所谓“CAN收发器”,通俗来讲,就是把CAN高和CAN低两根线的(电压)差分数据转换成如0、1、0、1这样的逻辑数据。更专业一点的大家自行百度一下就好了,本文主要讲一下CAN收发器怎么使用。
仅从CAN数据收发来看,接线是这样的: 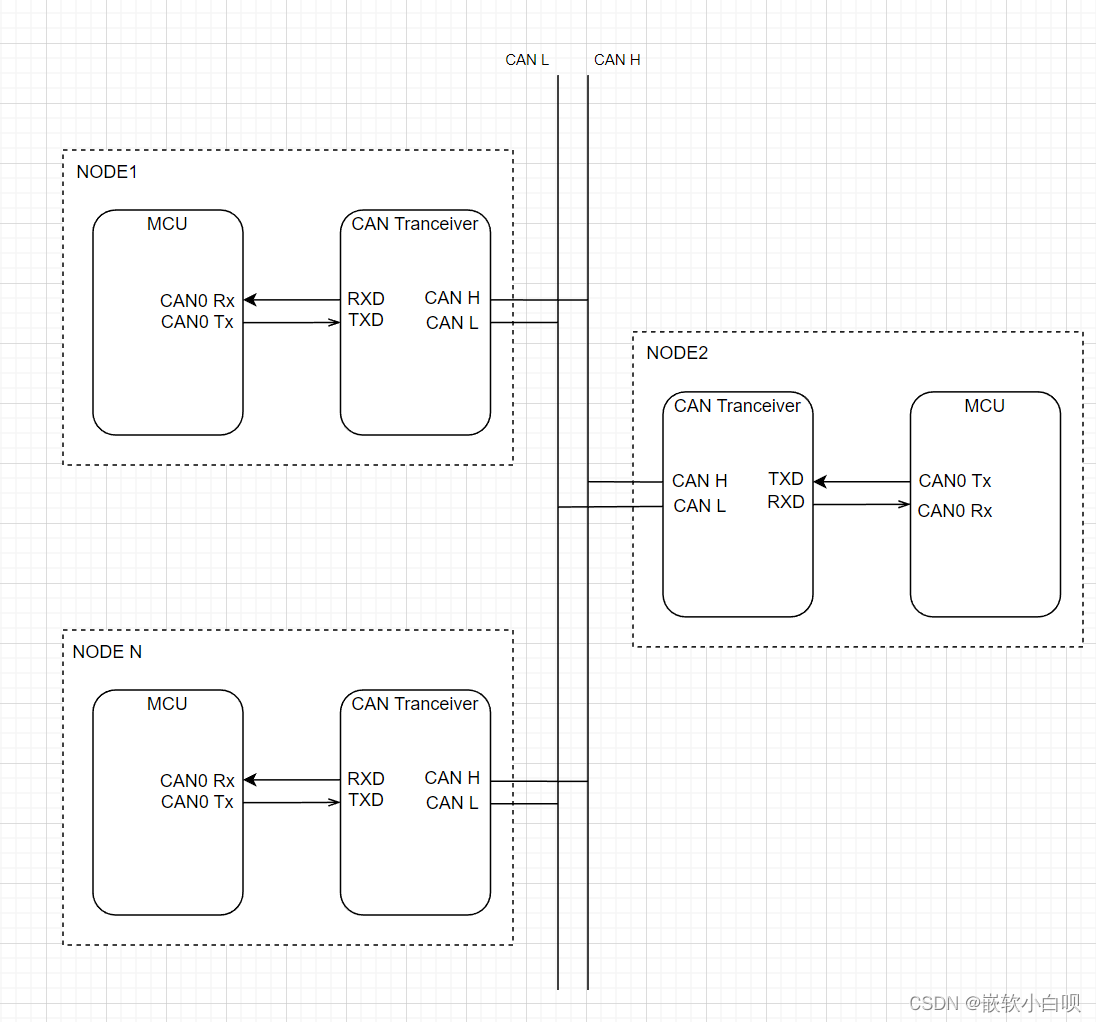
接下来讲一下具体收发器模式如何切换、休眠唤醒如何通过收发器实现
基础版CAN收发器:TJA1059(TJA1049)收发器
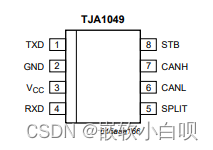
TJA1049 引脚图:
先看一下TJA1059的引脚图

再看下TJA1049的引脚图
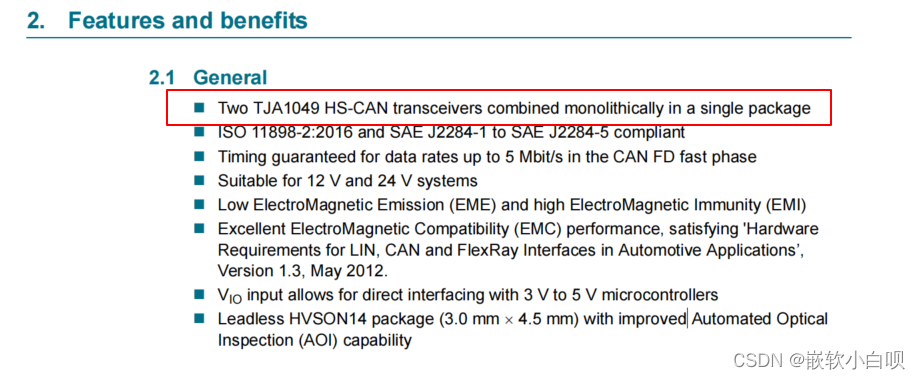
明显可见,TJA1059其实就是两个TJA1049合在了一块。TJA1059的数据手册也有说:
TJA1049 收发器模式及各个模式切换方法:
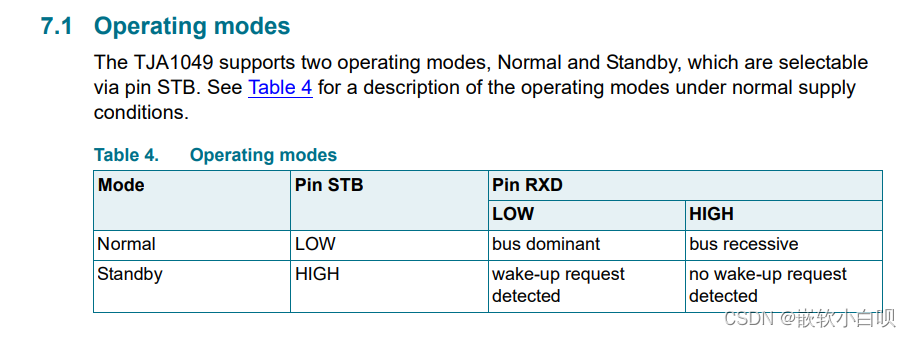
Normal模式:
功能:只有该模式CAN报文能收能发。要正常收发报文就需要切到这个模式。
模式切换方法:把收发器的STB脚拉低就切换到Normal模式了
Standby模式:
功能:①该模式下CAN报文不能收不能发。②该模式下可通过检测RXD引脚得知是否CAN总线出现CAN报文,进而用于实现MCU的报文唤醒检测。
模式切换方法:把收发器的STB脚拉高就切换到Standby模式了
TJA1049 CAN通讯功能
开启通信时就把收发器切到Normal模式。关闭通信时就把收发器切到Standby模式。
TJA1049 休眠唤醒功能:
据我目前所知,TJA1049只能用来做唤醒检测,无法用于作为MCU进入休眠低功耗检测的条件。因为TJA1049只有Normal、Standby两种模式。
唤醒检测:
TJA1049处于Standby模式。此时TJA1049若检测到总线有CAN报文(任意报文)后,TJA1049的RXD引脚会从高电平拉低至低电平,MCU可通过检测TJA1049的RXD引脚低电平作为报文唤醒信号。
但由于TJA1049处于Standby模式检测到总线有CAN报文后,RXD引脚拉低不会一直保持为低电平(如总线只发了一帧报文,RXD引脚拉低后会立即又变回高),因此MCU不能采用轮询检测的方式读取低电平作为唤醒信号,必须使用中断捕获RXD引脚下降沿才能确保MCU能立即捕获到唤醒信号。
升级版CAN收发器:TJA1043收发器
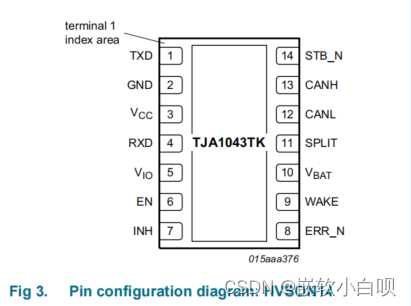
TJA1043 引脚图:
TJA1043 收发器模式及各个模式切换方法:
TJA1043收发器有5个模式:Standby、Normal、Listen-Only、Go-To-Sleep、Sleep。
收发器模式切换状态机: 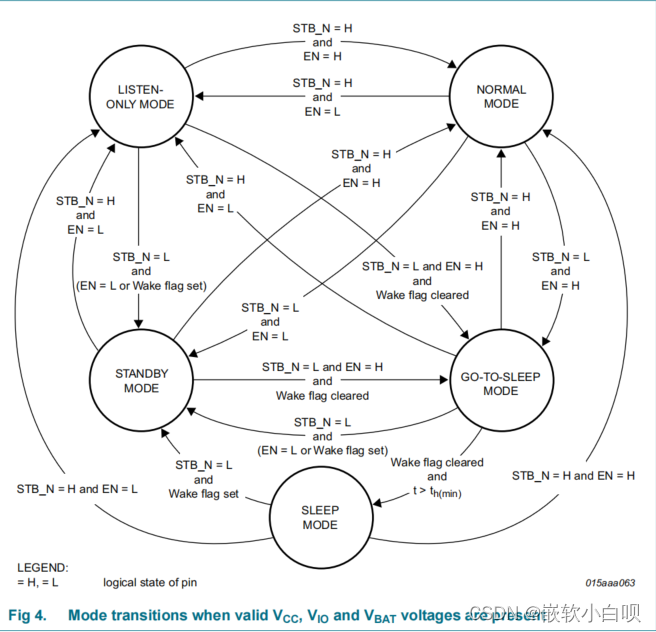
收发器模式切换方法手册说明:
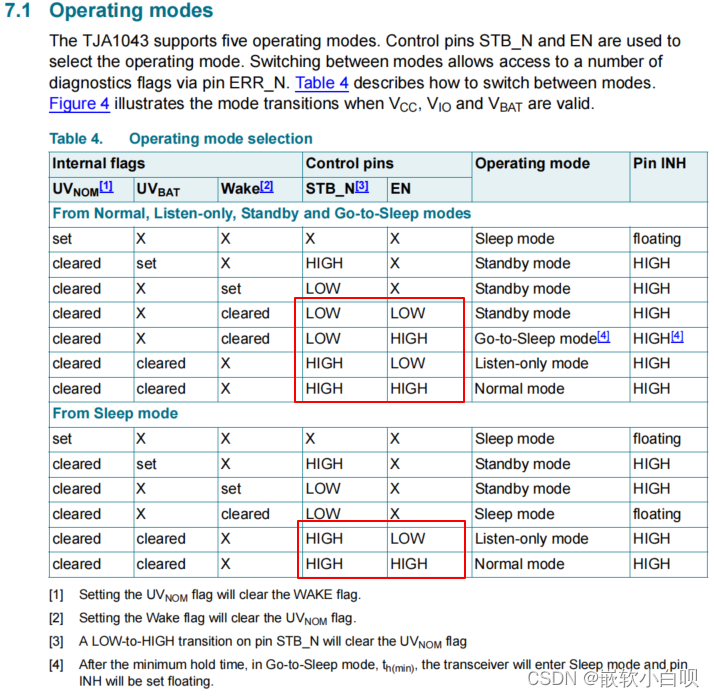
Normal模式:
功能:只有该模式CAN报文能收能发。要正常收发报文就需要切到这个模式。
模式切换方法:STB拉高、EN拉高
Standby模式:
功能:①该模式下CAN报文不能收不能发。②该模式下可通过检测ERR或RXD引脚得知是否CAN总线出现CAN报文,进而用于实现MCU的报文唤醒检测,手册说明如下图所示:
模式切换方法:STB拉低、EN拉低
Listen-Only模式:
不管,一般不使用该模式。
Go-To-Sleep模式和Sleep模式:
功能:①该模式下CAN报文不能收不能发。②该模式下可通过判断INH引脚进行下电休眠条件检测。③该模式下可通过检测ERR或RXD引脚得知是否CAN总线出现CAN报文,进而用于实现MCU的报文唤醒检测,手册说明如下图所示:
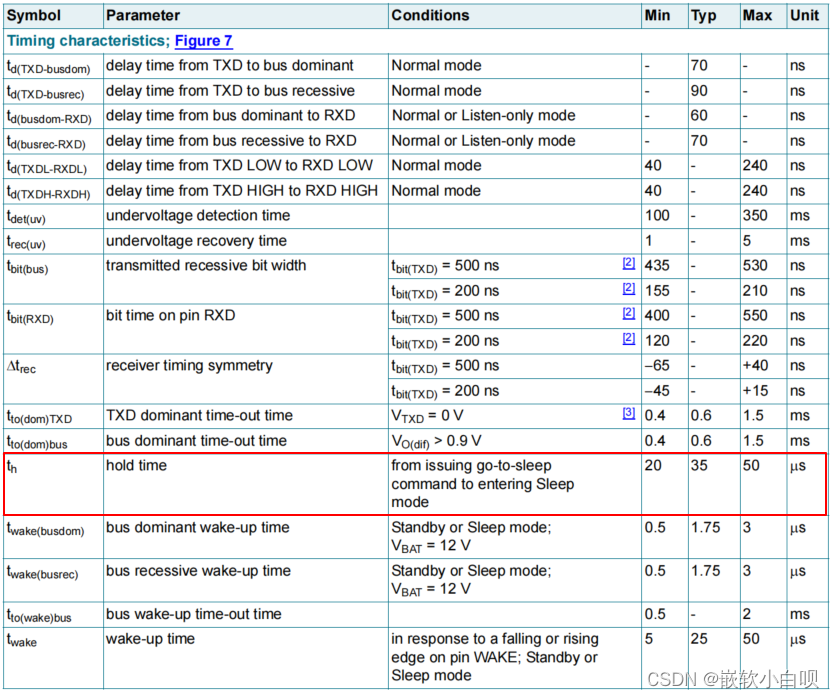
模式切换方法:把Go-To-Sleep模式和Sleep模式写一块的原因,是因为Sleep模式是没法直接通过控制STB和EN电平的方法进入的,而是通过控制STB和EN电平使收发器进入Go-To-Sleep模式后,等待20us-50us后收发器自行进入Sleep模式,手册说明如下图所示:
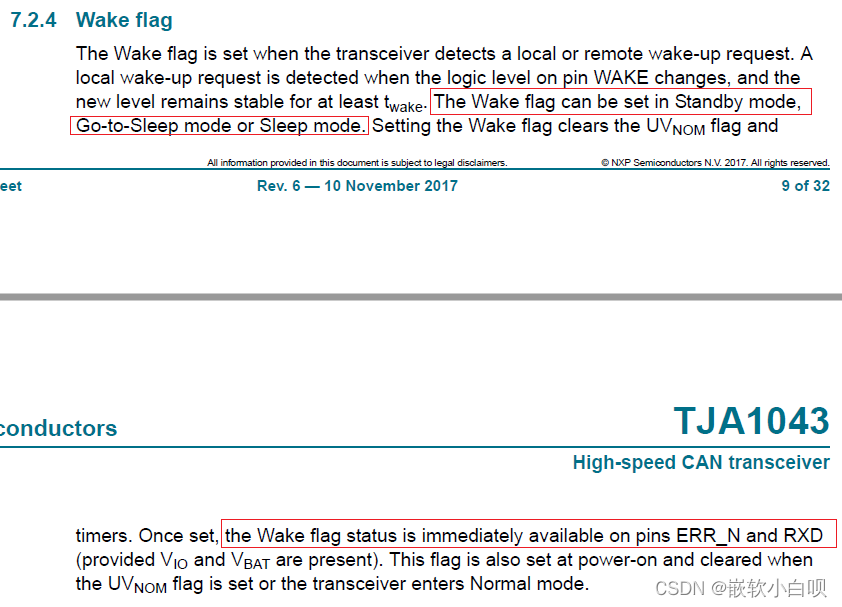
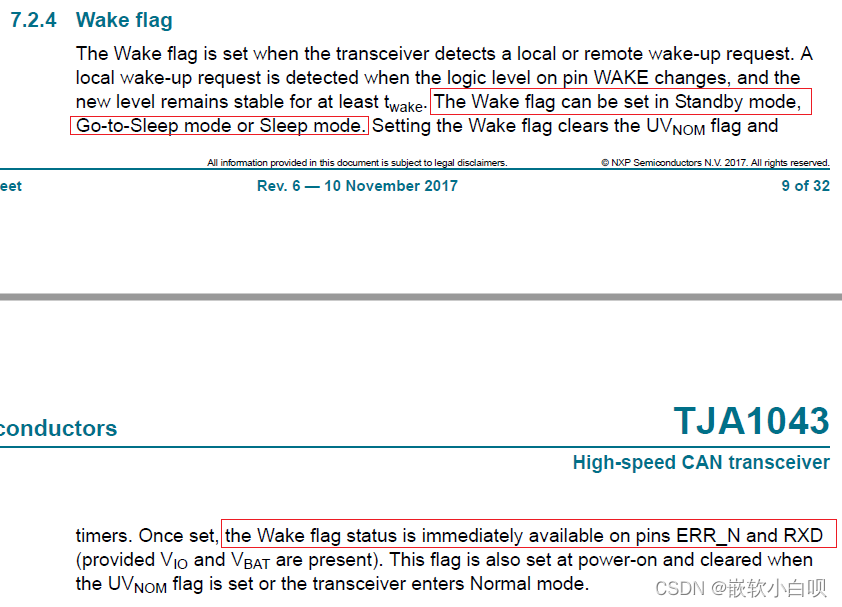
关于Wakeflag: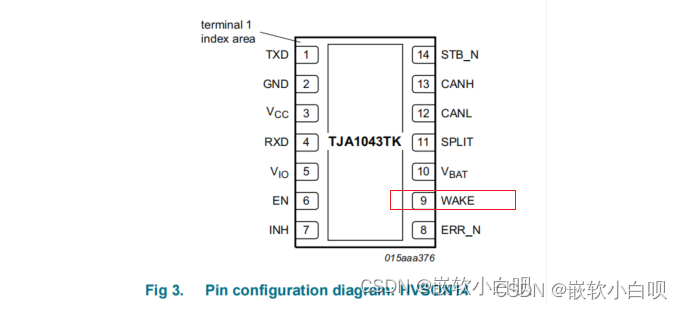
在最初我不理解基于1043收发器的休眠唤醒机制时,由于1043可以检测报文唤醒,然后我看数据手册,看到有个WAKE引脚,以为它是通过WAKE引脚实现的,然后手册也确实有说WAKE引脚能实现唤醒功能,然后我就总想着把WAKE引脚和报文唤醒扯一起。最后才发现这报文唤醒和WAKE引脚是分开的两个功能,两者没关系。
如下图所示:
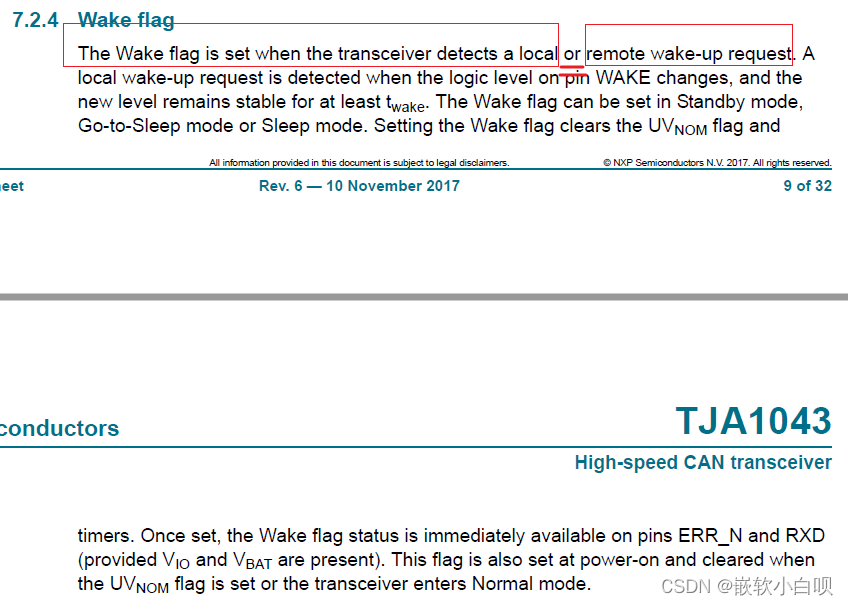
也就是说Wake引脚可以接一根唤醒信号线实现唤醒功能,当收发器在Standby或Sleep时,Wake脚检测到电平变化时,然后RXD和ERR会拉低。但是一般情况下我们用不上这个功能,我们用的是CANH和CANL检测到CAN报文时RXD和ERR会拉低这个功能。
而所谓的Wakeflag,它的意思是RXD和ERR拉低表示置起了Wakeflag。然后进入Normal状态后,会把RXD和ERR拉回高,即清掉了Wakeflag。
TJA1043 CAN通讯功能:
开启通信时就把收发器切到Normal模式。关闭通信时就把收发器切到Standby模式。
TJA1043 休眠唤醒功能:
MCU通过判断收发器的INH脚进入休眠:
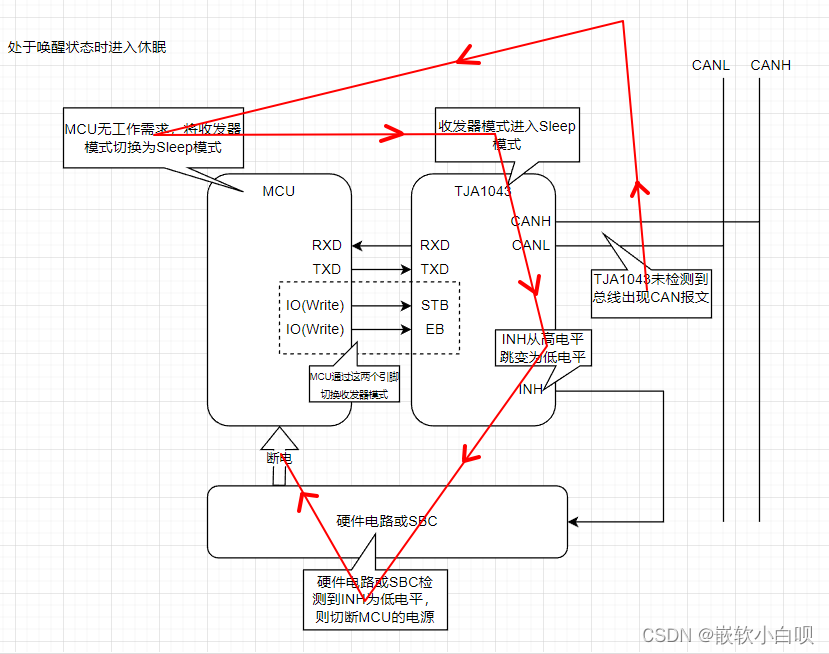
由于TJA1043的INH脚只有在Sleep模式时为浮空,其它模式都为高电平,因此若硬件给INH脚设为下拉模式,则只有当收发器为Sleep模式时,INH才为低电平,如下图所示。
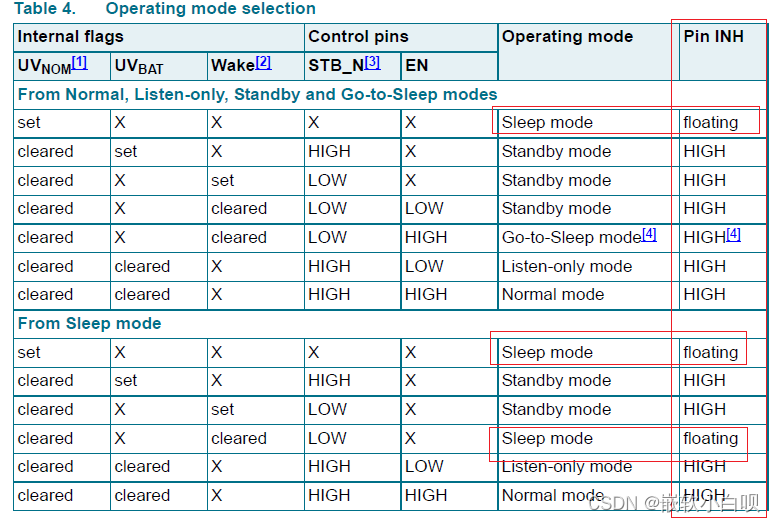
因此硬件或SBC可通过检测INH脚为高电平时才给MCU供电,为低电平时则切断MCU的供电,即可实现MCU的休眠。即:MCU控制收发器的模式切换为Sleep模式进而使得MCU进入休眠模式。
需要注意的是:
①收发器要进入Sleep模式,是通过控制收发器STB为低电平,EN为高电平使收发器进入Go-to-Sleep模式,然后等待20-50us后收发器会自行进入Sleep模式。
②收发器在Standby模式或Sleep模式,若检测到CAN总线有报文,ERR会拉低,且INH会保持高电平无法拉低。(因此这种情况MCU读取到ERR拉低后,需要进行唤醒操作并把收发器切为Normal。否则,收发器处于Sleep模式,但INH拉高。然后MCU又不做任何操作,会导致无法休眠,又无法唤醒,这就出问题了。)
休眠流程如下图所示:
唤醒检测情况1:MCU处于断电状态(MCU电源被切断的状态)时进行唤醒源检测。
此时TJA1043处于Sleep模式(注意,此时MCU断电,但CAN收发器是有电的,因为收发器要一直检测CAN总线)。此时TJA1043检测到总线有CAN报文(任意报文)后,TJA1043的ERR及RXD引脚会从高电平拉低至低电平,并且保持为低电平(直到收发器模式切换为Normal模式),MCU可通过检测TJA1043的ERR或RXD引脚低电平作为报文唤醒信号。
值得说明的是,与上面说的TJA1049收发器不同,TJA1043在Standby模式或Sleep模式检测到总线有CAN报文后,ERR和RXD会一直保持为低电平,直到收发器模式切换为Normal模式。因此MCU通过检测TJA1043的ERR或RXD引脚读取是否被CAN报文唤醒时不能通过中断读取引脚电平边沿变化,而是必须通过轮询的方式读取引脚电平为低时判断为有CAN报文唤醒。原因如下:
基于TJA1143的唤醒流程为:当MCU休眠时总线出现CAN报文,此时CAN收发器会检测到CAN报文并把ERR和RXD拉低,同时把CAN收发器的INH引脚拉低,硬件检测到INH引脚为低后将会给MCU供电,MCU上电后此时CAN收发器的ERR和RXD早已拉低,已经不会出现边沿跳变,因此无法通过中断捕获编译跳变信号,所以MCU必须通过轮询检测的方式读取CAN收发器的ERR引脚或RXD引脚为低电平进行唤醒源检测。
唤醒流程如下: 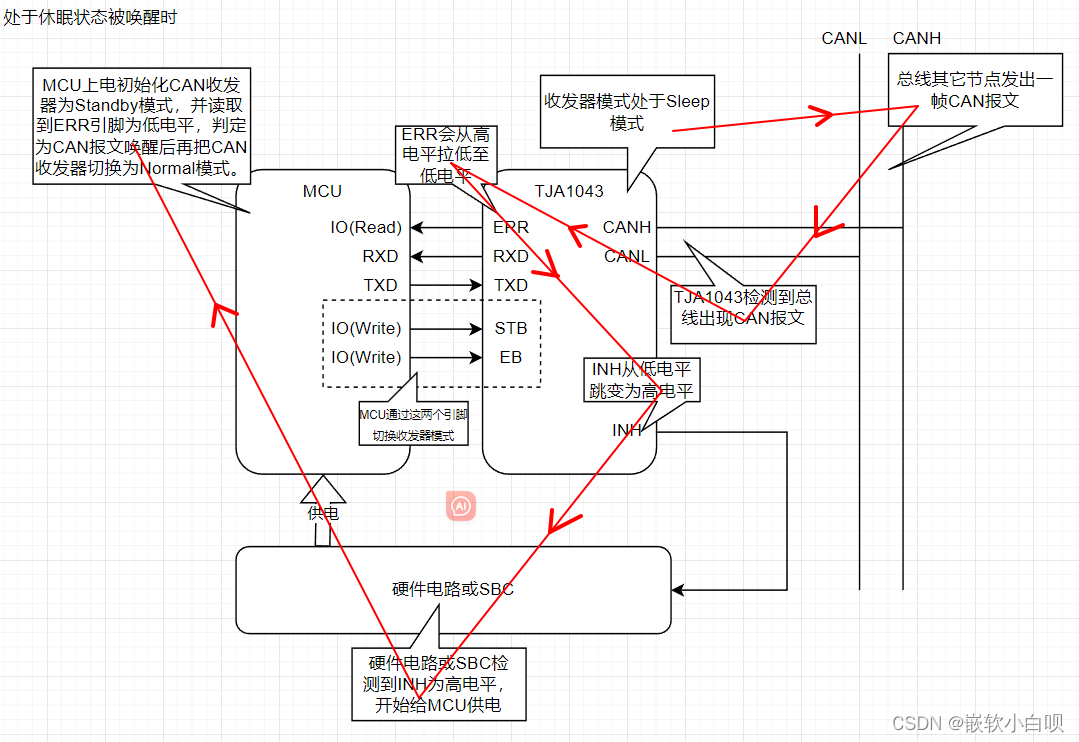
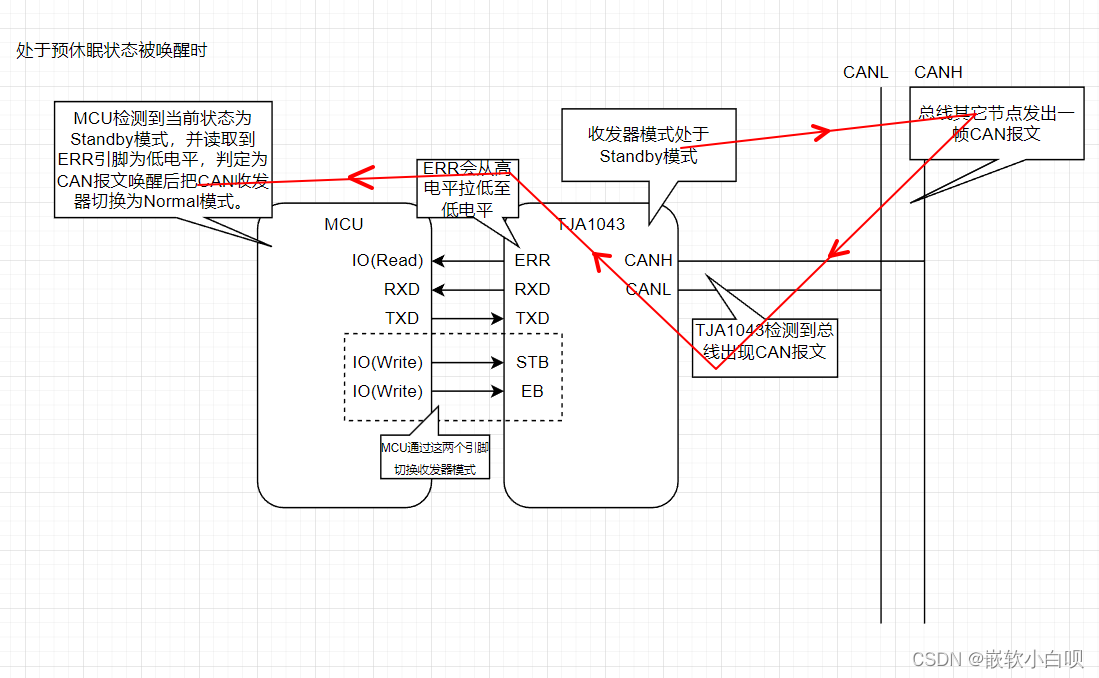
唤醒检测情况2:MCU处于有电状态(MCU此时一般处于预休眠状态)时进行唤醒源检测。
这种情况与上面的“唤醒检测情况1”不同的地方为:
MCU有电且正在运行、TJA1043处于Standby模式。
其它地方与上面的“唤醒检测情况1”是一样的。
唤醒流程如下图所示:
加强版CAN收发器:TJA1145收发器
TJA1145其实就是TJA1043的升级版。相同的功能就不再赘诉了,大家看上面的TJA1043就好了。下面只说差异的地方。
TJA1145只不过是在TJA1043的基础上增加了所谓的Partial Networking功能,这个功能是用来做唤醒检测的。
简单来说就是TJA1145收发器在Standby或Sleep模式的时候不但能监控是否CAN总线出现CAN报文,还能监控CAN报文的ID和DLC,如果CAN报文ID或DLC与配置的不匹配,那就认为没检测到唤醒报文。
我们先看下TJA1145的引脚图:
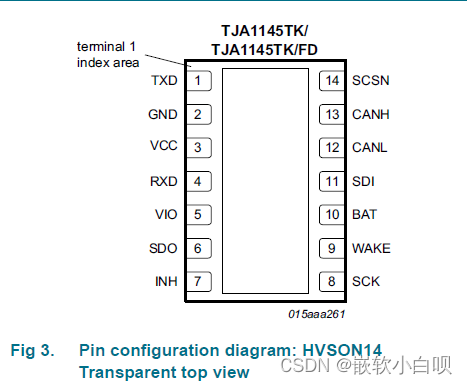
可见,与TJA1043不同,TJA1145提供了SPI接口。
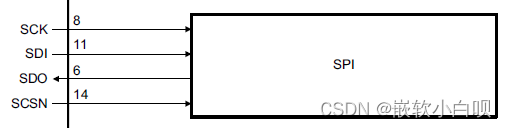
也就是说,TJA1145的模式切换不再是像TJA1143那样通过改变EN和STB两个引脚电平取控制,而是直接通过SPI发一串数据到收发器,收发器就把模式切换了。
唤醒检测也不像TJA1043那样通过读取ERR或RXD引脚的电平去检测唤醒信号了,而也是直接通过SPI发一串数据到收发器,收发器也通过SPI告诉你是否检测到唤醒报文。
因此,TJA1145要使用好的关键,其实就是MCU和SPI的通路要打通。关于SPI和TJA1145的SPI开发,我后续会专门另外再写文章仔细讲。
结束语
朋友们,我觉得我用会了这几个CAN收发器,以后其它CAN收发器应该也是大差不差的用法。
对于休眠唤醒这一块,对于刚接触的人来说,我觉得还是有点复杂的,因为我刚接触的时候也很头疼,因为涉及到的模块还是很多的。本文只是讲休眠唤醒与收发器关联的部分,后面文章我会专门整体、系统讲一下MCU的休眠唤醒方案的。
我会尽力用最简洁的语言给大家讲这些开发知识的,让没搞过这些东西的小白朋友们都能听到我在讲什么,让自己下次忘记之后回来看也一下能回忆起来。朋友们,加油!!!
返回目录:


















 4839
4839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









