







 本文介绍模拟退火算法,它是一种随机求取最优解的算法,改进了爬山算法可能停在局部最优的弊端。若下一状态为更优解则跳转,非更优解也有一定概率跳转,随温度降低该概率下降。作者对确定初始温度和衰减值存疑,还给出最小包含球代码。
本文介绍模拟退火算法,它是一种随机求取最优解的算法,改进了爬山算法可能停在局部最优的弊端。若下一状态为更优解则跳转,非更优解也有一定概率跳转,随温度降低该概率下降。作者对确定初始温度和衰减值存疑,还给出最小包含球代码。
模拟退火算法
具体解释就不详细说了,这里有大佬的博客
https://www.cnblogs.com/ranjiewen/p/6084052.html
https://blog.youkuaiyun.com/acdreamers/article/details/10019849
只想说自己的理解。
首先来讲模拟退火是一种随机算法,它是一种求取最优解的算法。改进了爬山算法可能会停在局部最优的弊端。
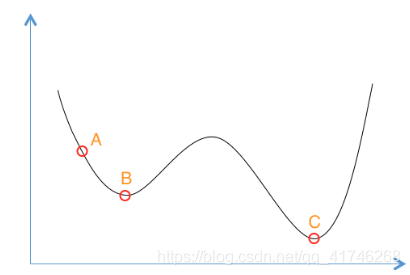
(截自大佬博客的图)
拿这个举例,爬山算法从A开始寻找,往右寻找因为B处于局部最优而导致停止,而我们需要的最优解为C点。于是模拟退火改进为如果下一状态为更优解,我们就跳到下一状态,如果下一状态不是更优解,我们以一定概率跳到下一状态。这样就会有概率跳到B点的右边,最后选择最优解C点。
下面这是来自wiki的动态解释
随着温度降低,跳到非更优解的概率明显降低,也正因为如此整个答案才会逐渐趋近最优解。
我弄不太明白的就是决定这个求取最优解的概率,因为它是由初始温度T和衰减值delta控制的,在做题时如何确定这个初始温度和衰减值来确定能求出最优解(太菜了只能在TLE的边缘疯狂试探),否则即便写出程序也很有可能是WA,因为毕竟是个随机算法
一份最小包含球的代码
http://poj.org/problem?id=2069
找一个最小球的半径将给出的所有点包含在内
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <queue>
#include <cmath>
#include <string>
#include <cstring>
#include <map>
#include <set>
#include <cmath>
//#include <tr1/unordered_map>
//#include <bits/stdc++.h>
using namespace std;
#define me(x,y) memset(x,y,sizeof x)
#define MIN(x,y) x < y ? x : y
#define MAX(x,y) x > y ? x : y
typedef long long ll;
typedef unsigned long long ull;
const double INF = 0x3f3f3f3f;
const double eps = 1e-08;
const double PI = acos(-1.0);
const double T=100;
const double delta=0.98;
const int maxn = 55;
struct Point{
double x,y,z;
double dis(Point A){
return sqrt((A.x-x)*(A.x-x)+(A.y-y)*(A.y-y)+(A.z-z)*(A.z-z));
}
};
double search(Point p[],int n){
Point s = p[0];
double t=T;
double ans=INF;
while(t > eps){
int k = 0;
for(int i = 0; i < n; ++i){
if(s.dis(p[i]) > s.dis(p[k])) k = i;
}
double d = s.dis(p[k]);
ans = min(ans,d);
s.x += (p[k].x - s.x)/d*t;
s.y += (p[k].y - s.y)/d*t;
s.z += (p[k].z - s.z)/d*t;
t *= delta;
}
return ans;
}
Point p[maxn];
int main(){
int n;
while(cin>>n && n){
for(int i = 0; i < n; ++i){
scanf("%lf%lf%lf",&p[i].x,&p[i].y,&p[i].z);
}
printf("%.5f\n",search(p,n));
}
return 0;
}
/*
*/

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









