







问题
不同于二维目标检测,三维目标检测中的基准框包含着大量的信息,其能够很自然的提供前景点的标记,甚至提供位于基准框中各个点的内部相对位置。而这些信息对于三维目标检测是非常重要的。三维目标网络的内部相对位置包含了三维基准框内点的分布,这类信息能够很轻易的从点云数据中获得,且包含大量的信息,但是之前从来没有三维边界网络使用这些信息。基于这个观察,本文作者提出了Part-Aware and Part-Aggregation网络.
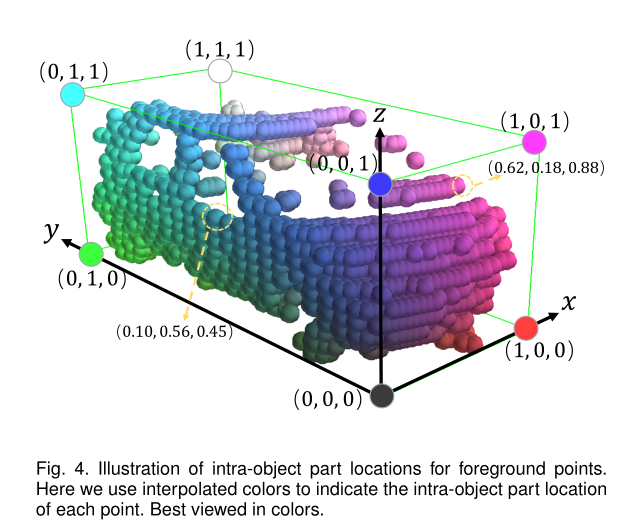
内部相对位置的图示。通过这些相对位置,可以帮助网络更好的预测三维边界框。
解决方法
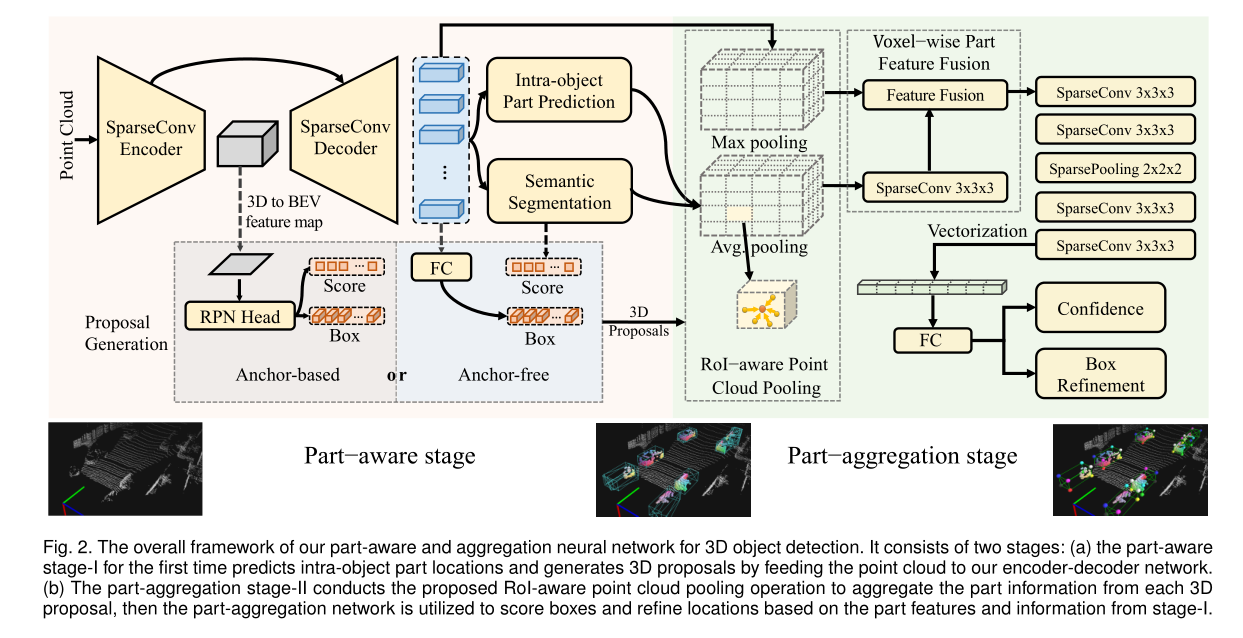
网络的总体结构如上图所示,本文作者设计了一个使用稀疏卷积的U-Net网络。其中这部分Encode-Decode部分的网络如下图所示:
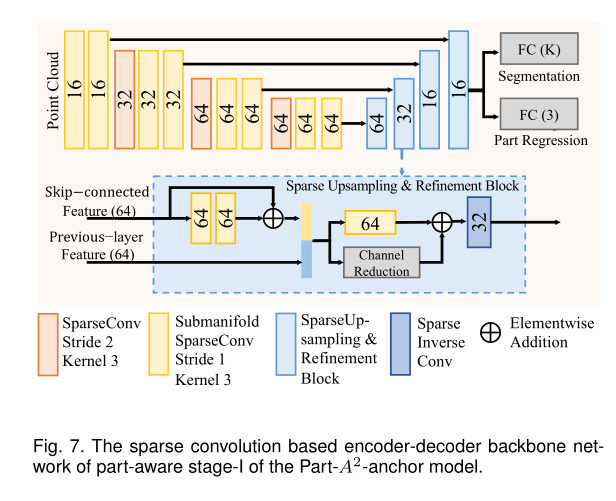
注意,这个与Second中的还是不太一样的,其增加了一个反卷积部分的网络。作者使用这些特征做了两个方面的工作,一个分支是用来预测点的类别,即属于前景点还是属于背景点,另一个分支是用来预测前景点相对边界框的内部相对位置。
关于前景点内部相对位置的计算,其计算公式如下:
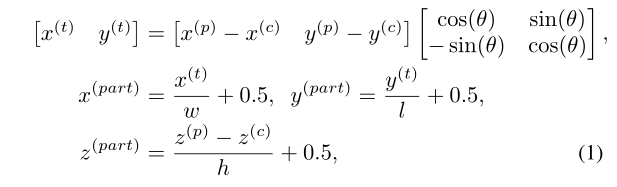
其中 x p x^p xp表示的是点云的原始坐标, x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1809
1809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









