






vld和rdy握手类型的驱动
背景:驱动收到rdy才能发起驱动,否则保持。
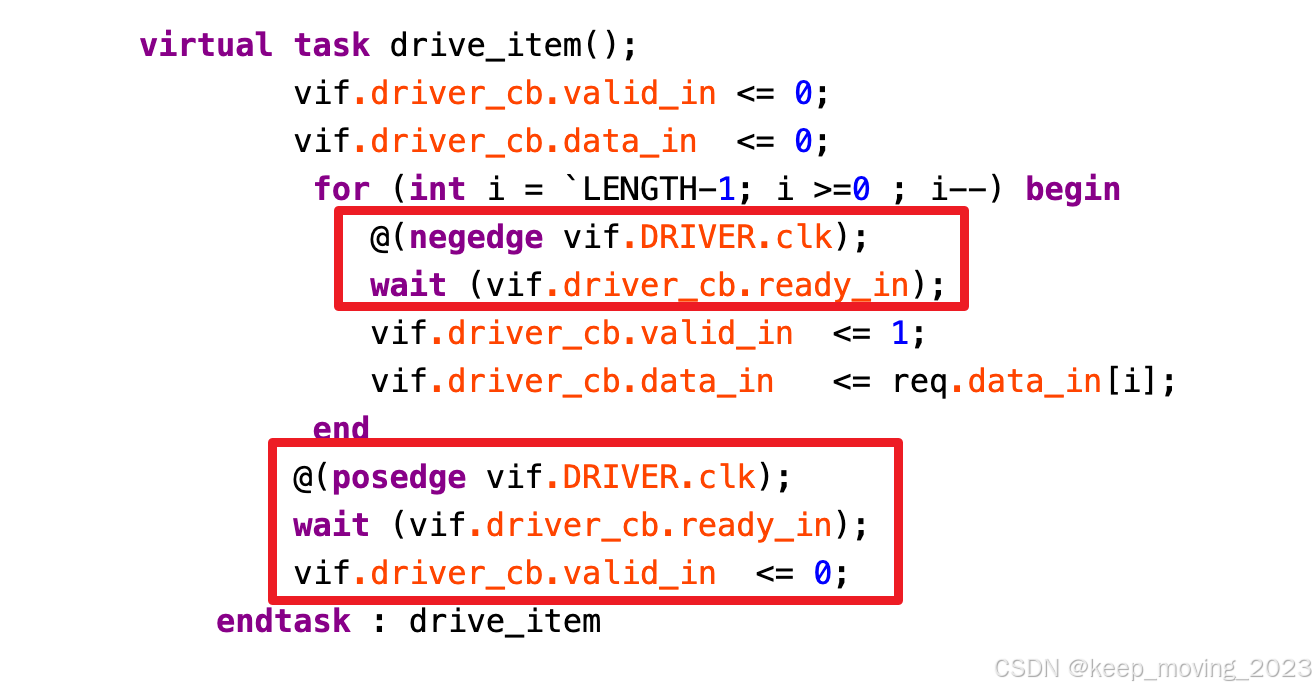
实践示例:
这样可以实现背对背发包,需要注意的地方就是,如果是最后一个包,DUT rdy一直拉高,TB这里发完最后一个包,要接口的vld信号置为无效。否则vld&rdy都会一直为高,输入大量非预期的包。所以需要在发完一个item后,再去初始化一下接口。
task drv();
dut.data <= Tb.data;
do begin
@clk ;
end while(rdy !== 1);
endtask
task run_phase();
supper.phase;
forever begin
init_if();
....;//get item
drv();
end
这里用了wait,可能会潜在风险;之前遇到过wait会get到毛刺导致环境认为已经达到wait条件,就是不知道这个下降沿能不能规避这个问题;
vld=0时,对其他信号随机驱动为0/1/rand/x等
run phase调用
get_stim任务
task get_stim()
SEQ_TR tr;
forever begins
seq_item_port.try_next_item(tr);
if(tr == null) driver_idle();
else begin
driver_pkt();
seq_item_port.item_done(tr);
end
endtask
task driver_idle();
vif.data <= 0;
vif.data <= '1;
vif.data <= 'x;
vif.data <= $urandom_range(1,9999);
@(posedge vif.clk)
endtask

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









