







 本文探讨了自动驾驶中的路径规划方法,包括质点模型、约束条件(如障碍物、曲率、最短路径)及离散化处理。介绍了A*、RRT、Lattice等规划算法,并讨论了轨迹平滑的挑战,如高维优化、贝塞尔曲线与螺旋线连接。总结了网格化、三维空间搜索和动态规划等优化技术在轨迹规划中的应用。
本文探讨了自动驾驶中的路径规划方法,包括质点模型、约束条件(如障碍物、曲率、最短路径)及离散化处理。介绍了A*、RRT、Lattice等规划算法,并讨论了轨迹平滑的挑战,如高维优化、贝塞尔曲线与螺旋线连接。总结了网格化、三维空间搜索和动态规划等优化技术在轨迹规划中的应用。
2.motion panning with autonomous driving
上一节讲了自动驾驶一些基本的硬件框架以及软件框架,还有一些路径规划的基本概念以及需要考虑的问题,比如路径平滑、交通规则等。本节将讲述自动驾驶中常用的路径规划的方法,约束问题的抽象表达以及路径的平滑等问题。
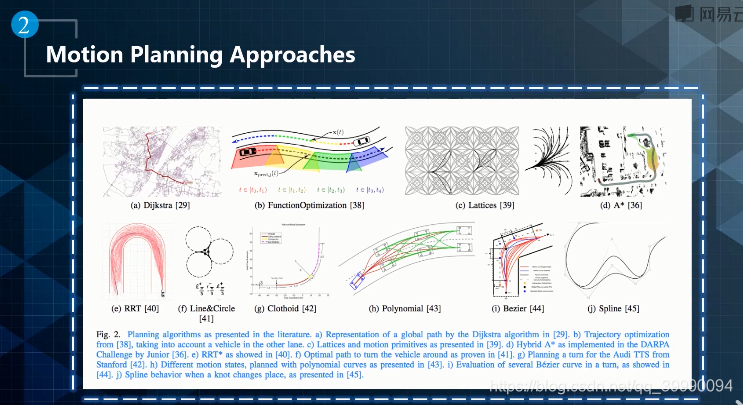
motion planning常用的方法有:
上面这些方法考虑的都是质点模型,车辆是一个刚体,规划过程中,需要考虑刚体与刚体会相交,质点是不会相交,同时,刚体还需要考虑heading等因素
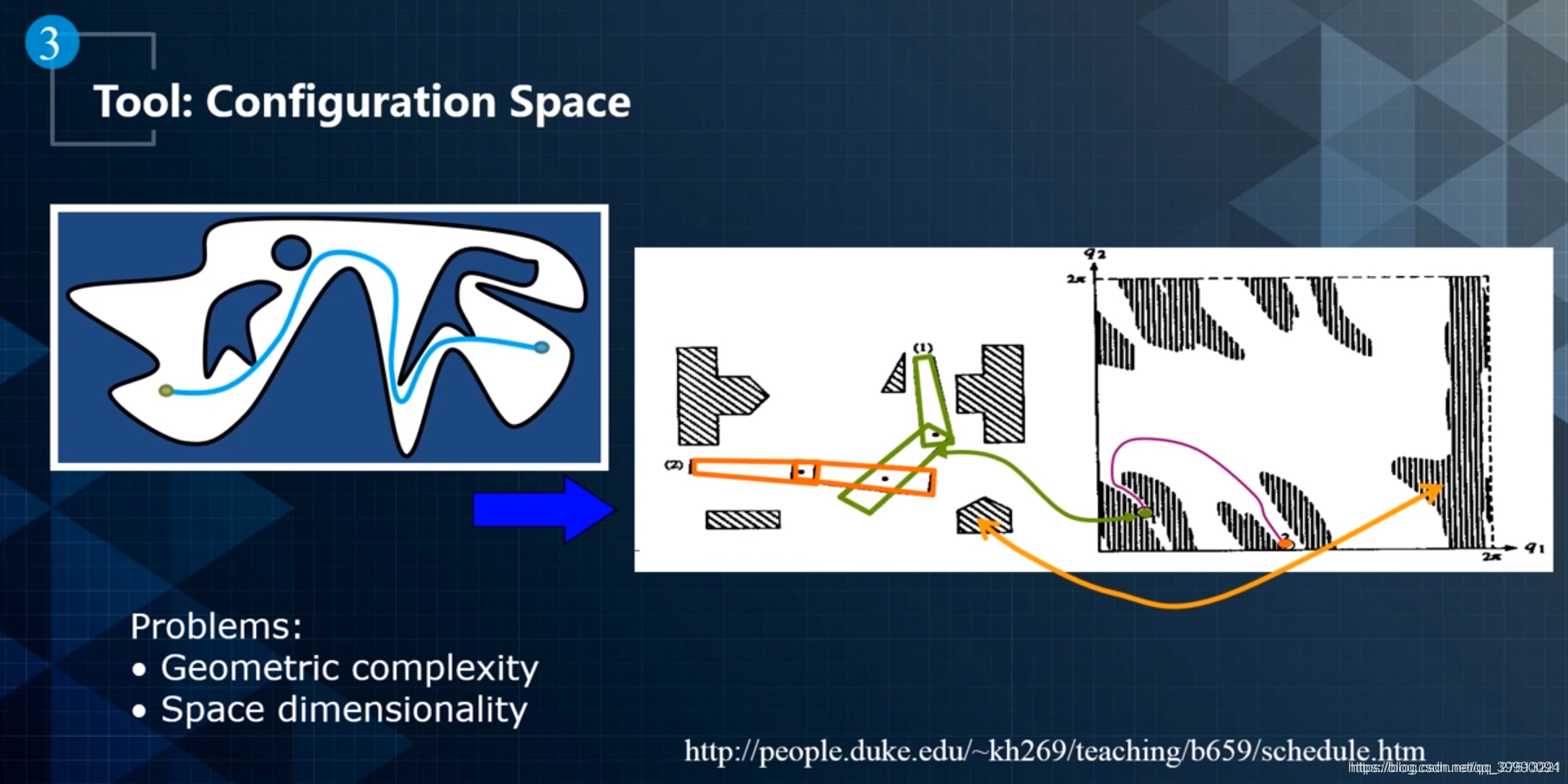
constraint(约束条件)的类型有:障碍物,车辆的转弯半径-曲率,以及最短路径等
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 5469
5469

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









