




 本文详细介绍了多目标跟踪中的卡尔曼滤波和匈牙利算法。卡尔曼滤波主要包括预测、更新和gating_distance的计算;匈牙利算法则用于解决二分图的最大匹配问题,以寻找最佳目标匹配,提升跟踪准确性。在实际应用中,这两个算法常结合使用,以提高目标跟踪的性能。
本文详细介绍了多目标跟踪中的卡尔曼滤波和匈牙利算法。卡尔曼滤波主要包括预测、更新和gating_distance的计算;匈牙利算法则用于解决二分图的最大匹配问题,以寻找最佳目标匹配,提升跟踪准确性。在实际应用中,这两个算法常结合使用,以提高目标跟踪的性能。
多目标跟踪关联匹配算法(匈牙利算法和KM算法原理讲解和代码实现)
目录 多目标跟踪关联匹配算法
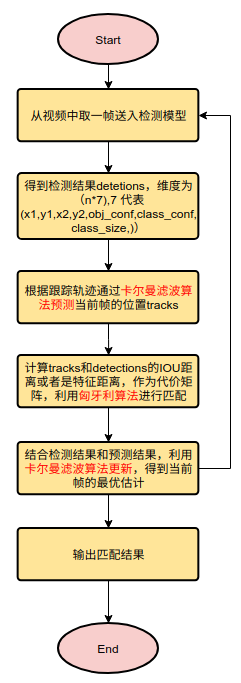
0、多目标跟踪算法流程
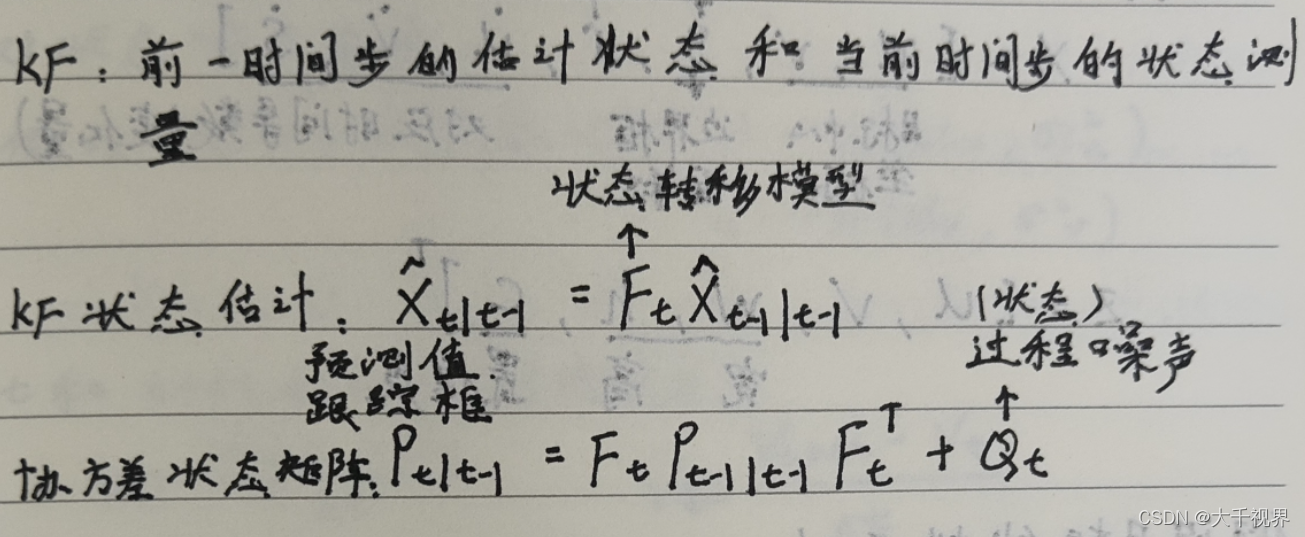
1、卡尔曼滤波
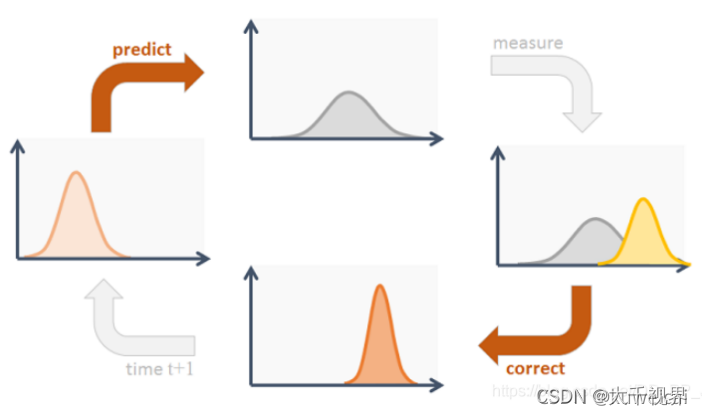
卡尔曼滤波算法的过程很简单,如下图所示。最核心的两个步骤就是预测和更新(下图的 correct)。

1.1 预测
对应代码如下:
def predict(self, mean, covariance):
"""Run Kalman filter prediction step.
Parameters
----------
mean : ndarray
The 8 dimensional mean vector of the object state at the previous
time step.
covariance : ndarray
The 8x8 dimensional covariance matrix of the object state at the
previous time step.
Returns
-------
(ndarray, ndarray)
Returns the mean vector and covariance matrix of the predicted
state. Unobserved velocities are initialized to 0 mean.
"""
std_pos = [
self._std_weight_position * mean[0],
self._std_weight_position * mean[1],
1 * mean[2],
self._std_weight_position * mean[3]]
std_vel = [
self._std_weight_velocity * mean[0],
self._std_weight_velocity * mean[1],
0.1 * mean[2],
self._std_weight_velocity * mean[3]]
motion_cov = np.diag(np.square(np.r_[std_pos, std_vel])) # 噪声矩阵Q
mean = np.dot(self._motion_mat, mean) # x'=Fx
covariance = np.linalg.multi_dot((
self._motion_mat, covariance, self._motion_mat.T)) + motion_cov # P' = FPF(T) + Q
return mean, covariance
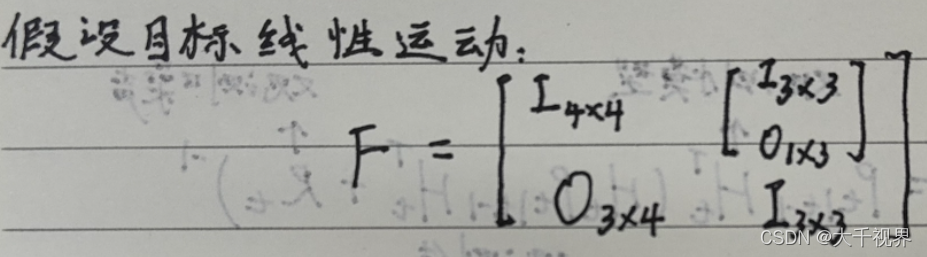
关于 F 和 Q 的初始化是在 init() 函数中进行的。F 称为 状态转移矩阵,其初始化为

def __init__(self):
ndim, dt = 4, 1.
# Create Kalman filter model matrices.
self._motion_mat = np.eye(2 * ndim, 2 * ndim) # 状态转移矩阵 F
for i in range(ndim):
self._motion_mat[i, ndim + i] = dt
self._update_mat = np.eye(ndim, 2 * ndim) # 测量矩阵 H
# Motion and observation uncertainty are chosen relative to the current
# state estimate. These weights control the amount of uncertainty in
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 169
169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









