









在控制理论和信号处理中,系统的阶数通常指的是描述系统行为的微分方程的最高阶数。系统的阶数反映了系统动态响应的复杂程度,以及控制系统所需的控制参数的数量。
RL电路(一阶系统)
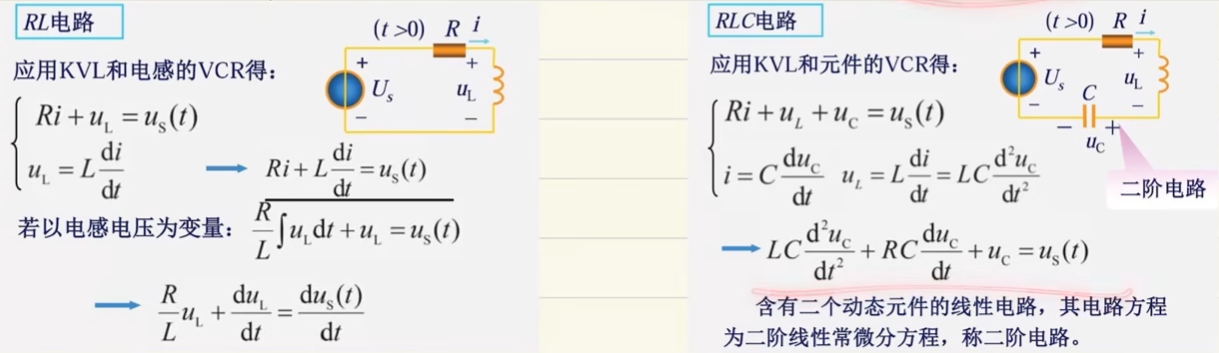
对于RL电路,我们有以下微分方程:
Ldidt+Ri=us(t)L \frac{di}{dt} + Ri = u_s(t)Ldtdi+Ri=us(t)
这里,LLL 是电感,RRR 是电阻,iii 是通过电感的电流,us(t)u_s(t)us(t) 是电源电压。这个方程是一个一阶线性微分方程,因为它只包含电流 iii 的一阶导数(即电流的变化率)。
- 一阶系统的特点:
- 系统的响应只依赖于一个状态变量(在这个例子中是电流 iii)。
- 系统的动态行为可以通过一个时间常数(τ=L/R\tau = L/Rτ=L/R)来描述,这个时间常数决定了系统达到稳态的速度,τ\tauτ越小系统达到稳态的速度越快。
- 一阶系统的典型响应包括阶跃响应、斜坡响应等,通常表现为指数增长或衰减。
RLC电路(二阶系统)
对于RLC电路(包含电阻 RRR,电感 LLL,和电容 CCC),我们有以下二阶微分方程:
Ld2idt2+Rdidt+1Ci=1Cus(t)L \frac{d^2i}{dt^2} + R \frac{di}{dt} + \frac{1}{C} i = \frac{1}{C} u_s(t)Ldt2d2i+Rdtdi+C1i=C1us(t)
这里,iii 是通过电感的电流,us(t)u_s(t)us(t) 是电源电压。这个方程是一个二阶线性微分方程,因为它包含电流 iii 的二阶导数(即电流变化率的变化率)。
- 二阶系统的特点:
- 系统的响应依赖于两个状态变量(在这个例子中可以是电流 iii 和电容上的电压 uCu_CuC)。
- 系统的动态行为可以通过两个时间常数来描述,这使得系统的响应更加复杂,可以表现出振荡行为。
- 二阶系统的典型响应包括欠阻尼、临界阻尼和过阻尼响应,这些响应取决于系统的阻尼比。
总结
- 一阶系统(如RL电路)的动态行为相对简单,通常只有一个时间常数决定系统的响应速度。
- 二阶系统(如RLC电路)的动态行为更加复杂,可以表现出振荡和不同的阻尼特性,需要更多的参数来描述和控制。
理解系统的阶数有助于选择合适的控制策略和分析系统的性能。

















 12
12

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









