







本节内容的适用范围:适用于工作在CCM模式中的电压控制型Buck电源。
主要回答的两个问题:
1、环路响应是什么?
2、建立电源环路的数学模型
前置知识点:
- 系统稳定性:原来处于平衡状态的系统,在受到扰动作用后都会偏离原来的平衡状态。若系统在扰动作用消失后,经过一段过度过程后,系统仍然能够回复到原来的平衡状态,则称该系统是(渐进)稳定的。否则,则称该系统是不稳定的。这是一种系统自身固有的特性,取决于系统本身的结构和参数,与输入无关。开环系统可以是稳定的,也可以是不稳定的。对于不稳定的开环系统,通过闭环控制可以在一定范围内实现稳定。对闭环系统来说,当注入一个干扰,系统响应是收敛的,那么这个系统是稳定的;如果系统响应是发散的,则系统是不稳定的。
- 传递函数:传递函数是用来描述系统行为的数学表达式。对于单反馈回路的闭环控制系统框图如下图所示。R(s)是输入信号,C(s)是输出信号,G(s)是系统的前向通道传递函数,H(s)是系统的反向通道传递函数。通常可以使用微分方程来描述系统的输出与输入的关系,但微分方程在求解复杂多项式中难度很大,通常使用拉氏变换转为复频域中求解,其中s=jw,包含了频率和相位。传递函数最后再通过反拉氏变换转成时域表达式。
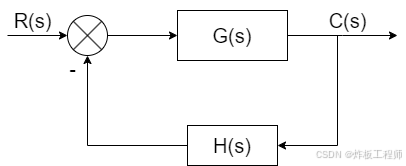
由图可知:
因此闭环传递函数为:
G(s)H(s)称为闭环系统的开环传递函数。通常也可以叫做环路响应,可以用来评估系统的稳定性。
以上的内容仅针对于线性系统。经典控制原理对线性系统的解释是满足叠加原理,即当给定一个输入r1(t),系统输出为c1(t);当系统输入为r2(t),输出变为r2(t)。当输入为r1(t)+r2(t),则输出是它们各自作用时输出的叠加。任何输入系统的扰动波形,都可以看作一系列正弦波的叠加。
电压控制型降压电路的典型拓扑如图所示。
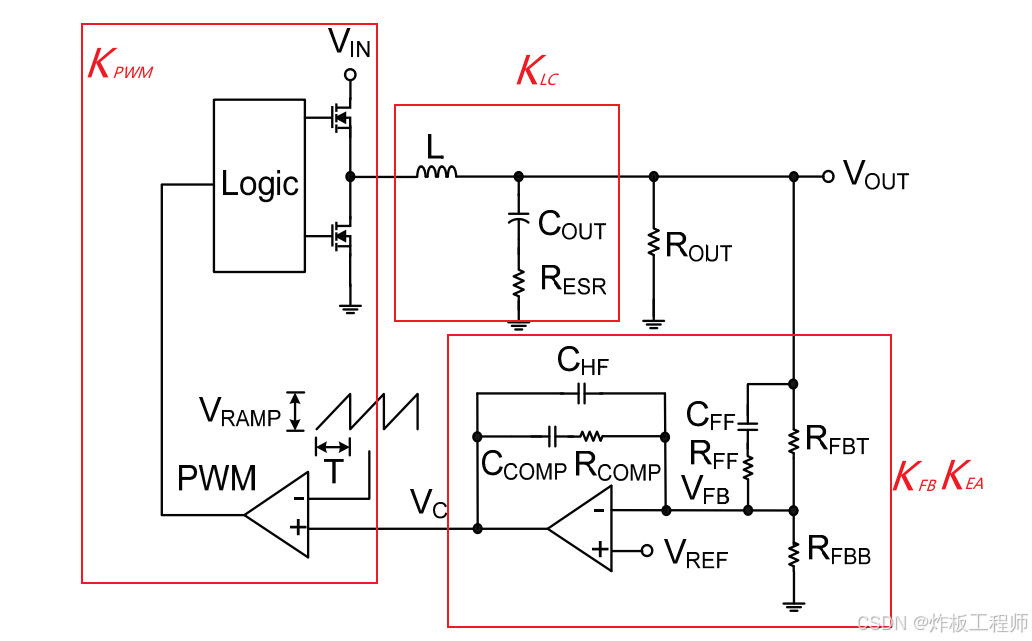
将控制系统分为4个环节,那么其框图可以表示为:
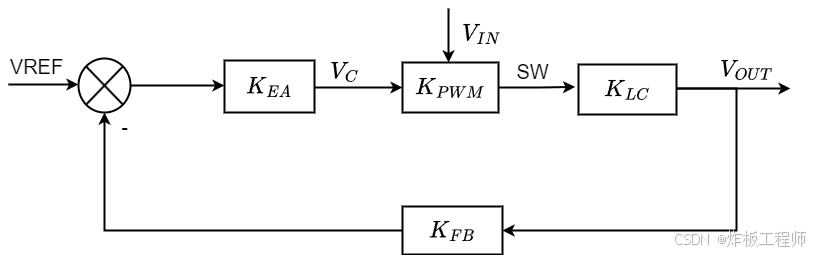
这里需要解释的是,系统的输入并不是输出电源Vin,而是内部的参考电压Vref。Vin在这里是作为系统的扰动存在的。回想一下,我们对于闭环控制系统,是不是期望系统的输出能够跟随输入的变化?很显然,无论输入电压怎么变化,我们期望输出电压是恒压,输入电压的波动对我们来说就是一个干扰信号。而如果改变参考电压Vref的大小,是可以影响输出电压大小的。
那么,系统的开环传递函数就可以表示为:
- 反馈网络的增益
:它是一个比例因子,在电路中指的是两个分压电阻。显然分压电阻确定后,它是一个与频率无关的常数。
- 脉宽调节器增益
:在这个环节里,输入的是误差放大器的输出电压Vc,输出是SW节点的PWM电压。显然这两者并不是线性的,如果不进行线性化,将难以展开分析。对于非线性系统,可以使用小信号建模的方法。即不分析大信号作用下的系统响应,而在很小的信号变化范围内,可以认为系统是线性的。
这里更便捷的方法是,我们定义该环节的输入是误差放大器的输出电压Vc,而输出是SW节点的占空比。这里记内部三角波的最大幅值为Vp,则Vc变化范围是从零到Vp,对应SW节点的0-100%占空比,这两者的关系是线性的。
对于Buck电路,我们知道占空比为Vout/Vin,SW节点的平均电压值等于输出电压Vout,因此可知:
可见PWM级的增益取决于输入电压和内部三角波的幅值的比值,这一级的增益为常数。
- 输出LC滤波器的增益
:
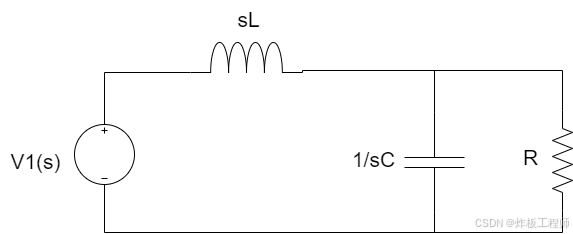
LC环节的阻抗如图所示,则:
其中,和
是这个二阶系统的两个极点。上面就是LC环节的传递函数,进一步地,将
和
提出来可以化为尾1标准型,那么前面的系数就是增益
。该传递函数没有零点,存在两个极点。在波特图上,零点可以使增益增加20db/dec的斜率,而极点使得增益减小20db/dec,因此在高频段该环节的增益以-40db/dec递减。
- 误差放大器的增益
:
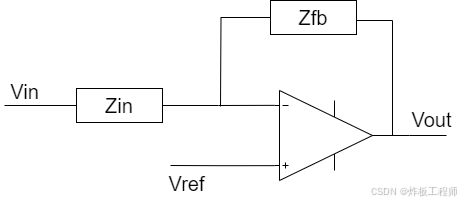
放大器环节的增益为:
反馈电阻的电压接在运放的负输入端,因此系统具有180度的相移,而前面LC滤波环节也存在一个0-180度的相移。误差放大器必须为精确电压调节提供高增益的同时,还要保证在满足动态响应要求的整个工作频率范围内,总相移保持小于360度。
在这里,Zin和Zfb都可以由不同的R、C器件组成。
- Zin采用R-C串联,会增加一个极点,使得增益降低,产生-90度相移。
- Zin采用R-C并联,会增加一个零点,使得增益增加,产生+90度相移。
- Zfb采用R-C串联,会增加一个零点,使得增益增加,产生+90度相移。
- Zfb采用R-C并联,会增加一个极点,使得增益减少,产生-90度相移。
这里已经涉及到3种补偿拓扑的内容了,关于零极点的理解和计算,可以参考博客:
开关电源环路学习笔记(8)-如何快速看出零点和极点_怎么估算一个电路的极点-优快云博客
总结:
由上各个环节的传递函数可知,回路的总增益可以表示为:
这里分母中存在R,如果R=0,即为空载时,系统会不稳定。这种情况下电源会工作在DCM模式。
关于电源环路的以下问题:
- 如何使用环路分析仪测量环路响应?
- 三种补偿网络介绍和零极点的计算。
- 如何通过补偿网络以改善电源的动态性能?
相关内容会在后续更新中讨论。
参考:
罗伯特《电源设计基础》 第六章
常俊林《自动控制原理》第二章第5节


















 2650
2650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









