




 相机标定是图像测量和机器视觉中的关键步骤,它涉及相机参数的获取,包括内参、外参和畸变参数。相机模型基于透视原理,包括理想模型和实际成像模型,后者考虑了畸变。畸变参数通常分为径向和切向两类。标定方法包括线性、非线性和张正友方法。实际应用中,使用如opencv的工具和算法可以完成相机标定并纠正畸变。
相机标定是图像测量和机器视觉中的关键步骤,它涉及相机参数的获取,包括内参、外参和畸变参数。相机模型基于透视原理,包括理想模型和实际成像模型,后者考虑了畸变。畸变参数通常分为径向和切向两类。标定方法包括线性、非线性和张正友方法。实际应用中,使用如opencv的工具和算法可以完成相机标定并纠正畸变。
相机标定的意义
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数(内参、外参、畸变参数)的过程就称之为相机标定(或摄像机标定)。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是科研工作的重点所在。
畸变(distortion)是对直线投影(rectilinear projection)的一种偏移。简单来说直线投影是场景内的一条直线投影到图片上也保持为一条直线。畸变简单来说就是一条直线投影到图片上不能保持为一条直线了,这是一种光学畸变(optical aberration),可能由于摄像机镜头的原因。
相机模型
数码相机图像拍摄的过程实际上是一个光学成像的过程。相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系以及这四个坐标系的转换。
一、 理想透视模型——针孔成像模型
相机模型是光学成像模型的简化,目前有线性模型和非线性模型两种。实际的成像系统是透镜成像的非线性模型。最基本的透镜成像原理如图所示:
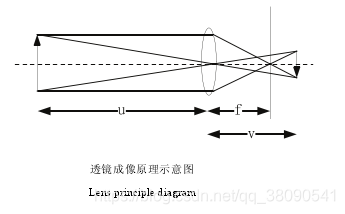
其中 u 为物距, f 为焦距,v 为相距。三者满足关系式: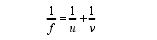
相机的镜头是一组透镜,当平行于主光轴的光线穿过透镜时,会聚到一点上,这个点叫做焦点,焦点到透镜中心的距离叫做焦距 f。数码相机的镜头相当于一个凸透镜,感光元件就处在这个凸透镜的焦点附近,将焦距近似为凸透镜中心到感光元件的距离时就成为小孔成像模型。小孔成像模型如图所示。
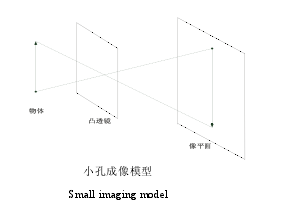
小孔成像模型是相机成像采用最多的模型。在此模型下,物体的空间坐标和图像坐标之间是线性的关系,因而对相机参数的求解就归结到求解线性方程组上。四个坐标系的关系图如下图所示,其中 M 为三维空间点,m 为 M 在图像平面投影成的像点。
参考博客:https://blog.youkuaiyun.com/lsh_2013/article/details/47615309
二、坐标转换基础
在视觉测量中,需要进行的一个重要预备工作是定义四个坐标系的意义,即 摄像机坐标系 、 图像物理坐标系、 像素坐标系 和 世界坐标系(参考坐标系) 。
①世界坐标系:是客观三维世界的绝对坐标系,也称客观坐标系。因为数码相机安放在三维空间中,我们需要世界坐标系这个基准坐标系来描述数码相机的位置,并且用它来描述安放在此三维环境中的其它任何物体的位置,用(Xw, Yw, Zw)表示其坐标值。
②相机坐标系(光心坐标系):以相机的光心为坐标原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,相机的光轴为Z 轴,用(Xc, Yc, Zc)表示其坐标值。
③图像坐标系:以CCD 图像平面的中心为坐标原点,X轴和Y 轴分别平行于图像平面的两条垂直边,用( x , y )表示其坐标值。图像坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
④像素坐标系:以 CCD 图像平面的左上角顶点为原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,用(u , v )表示其坐标值。数码相机采集的图像首先是形成标准电信号的形式,然后再通过模数转换变换为数字图像。每幅图像的存储形式是M × N的数组,M
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 801
801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









