






介绍
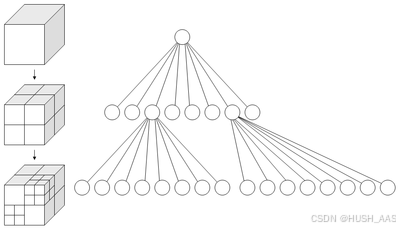
八叉树(octree)是一种树形数据结构,每个内部节点都正好有八个子节点。八叉树常用于分割三维空间,将其递归细分为八个象限。
原理
八叉树算法将空间递归地划分为八个子空间(称为八分体),每个子空间可以进一步细分,直到满足特定条件(如最小分辨率或点数量)。
Voxel,体积元素,简称体素,描述一个预设的最小单位的正方体。
示例
一、点云压缩
https://pointclouds.org/documentation/tutorials/compression.html#octree-compression
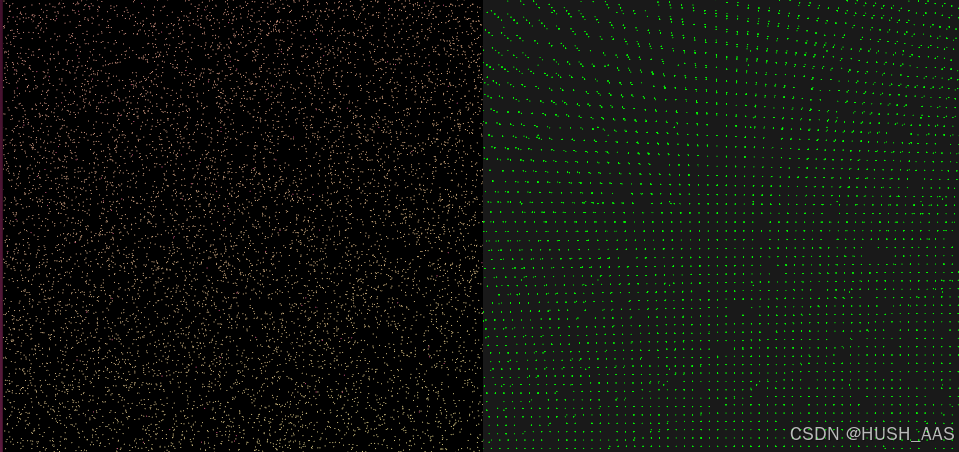
点云数据具有大数据量、高生成速率和多样性的特点,因此压缩技术对于点云的存储和传输至关重要。PCL 提供了强大的点云压缩功能,支持多种点云类型,并通过八叉树数据结构实现了高效的数据合并和处理。
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/compression/octree_pointcloud_compression.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <cmath> // 用于数学计算
#include <cstdlib> // 用于rand()和srand()
#include <ctime> // 用于时间函数
#include <thread>
class SimplePointCloudCompressor
{
public:
SimplePointCloudCompressor() : viewer("Point Cloud Compression Example") {}
void generateTorusAndProcessCloud()
{
// 创建一个环形圆环点云
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>());
float majorRadius = 1.0f; // 主半径
float minorRadius = 0.25f; // 次半径
int numPoints = 1000000; // 点的数量
srand(static_cast<unsigned>(time(0))); // 初始化随机数种子
for (int i = 0; i < numPoints; ++i) {
pcl::PointXYZRGBA point;
// 使用球坐标系生成点
float theta = 2 * M_PI * static_cast<float>(rand()) / RAND_MAX; // 环面角度
float phi = 2 * M_PI * static_cast<float>(rand()) / RAND_MAX; // 截面角度
point.x = (majorRadius + minorRadius * cos(phi)) * cos(theta);
point.y = (majorRadius + minorRadius * cos(phi)) * sin(theta);
point.z = minorRadius * sin(phi);
point.r = static_cast<uint8_t>((theta / (2 * M_PI)) * 255); // 根据位置设置颜色
point.g = static_cast<uint8_t>((phi / (2 * M_PI)) * 255);
point.b = 128;
cloud->points.push_back(point);
}
cloud->width = static_cast<uint32_t>(cloud->points.size());
cloud->height = 1;
if (!viewer.wasStopped()) {
std::stringstream compressedData;
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloudOut(new pcl::PointCloud<pcl::PointXYZRGBA>());
// 压缩点云
PointCloudEncoder->encodePointCloud(cloud, compressedData);
// 解压缩点云
PointCloudDecoder->decodePointCloud(compressedData, cloudOut);
// 添加原始点云到视口1
viewer.createViewPort(0.0, 0.0, 0.5, 1.0, viewport1); // 视口1占据左侧一半
viewer.setBackgroundColor(0, 0, 0, viewport1);
viewer.addPointCloud<pcl::PointXYZRGBA>(cloud, "original_cloud", viewport1);
// 添加解压缩后的点云到视口2
viewer.createViewPort(0.5, 0.0, 1.0, 1.0, viewport2); // 视口2占据右侧一半
viewer.setBackgroundColor(0.1, 0.1, 0.1, viewport2);
viewer.addPointCloud<pcl::PointXYZRGBA>(cloudOut, "decompressed_cloud", viewport2);
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0,
"decompressed_cloud", viewport2); // 设置解压后点云为绿色
while (!viewer.wasStopped()) {
viewer.spinOnce(100);
std::this_thread::sleep_for(std::chrono::milliseconds(100)); // 控制更新频率
}
}
}
void run()
{
bool showStatistics = true;
pcl::io::compression_Profiles_e compressionProfile = pcl::io::MED_RES_ONLINE_COMPRESSION_WITH_COLOR;
// 实例化编码器和解码器
PointCloudEncoder =
new pcl::io::OctreePointCloudCompression<pcl::PointXYZRGBA>(compressionProfile, showStatistics);
PointCloudDecoder = new pcl::io::OctreePointCloudCompression<pcl::PointXYZRGBA>();
// 生成并处理点云
generateTorusAndProcessCloud();
// 清理资源
delete PointCloudEncoder;
delete PointCloudDecoder;
}
pcl::visualization::PCLVisualizer viewer;
int viewport1, viewport2;
pcl::io::OctreePointCloudCompression<pcl::PointXYZRGBA> *PointCloudEncoder;
pcl::io::OctreePointCloudCompression<pcl::PointXYZRGBA> *PointCloudDecoder;
};
int main()
{
SimplePointCloudCompressor compressor;
compressor.run();
return 0;
}
二、基于八叉树的空间划分与搜索操作
搜索方式:
- 体素近邻搜索
- k近邻搜索
- 半径范围近邻搜索
#include <pcl/point_cloud.h> //点云头文件
#include <pcl/octree/octree.h> //八叉树头文件
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/pcd_io.h>
#include <iostream>
#include <vector>
#include <ctime>
int main(int argc, char **argv)
{
srand((unsigned int)time(NULL)); //用系统时间初始化随机种子与 srand (time (NULL))的区别
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
// 创建点云数据
cloud->width = 10000;
cloud->height = 1; //无序
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i) //随机循环产生点云的坐标值
{
cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
}
float resolution = 128.0f;
pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(resolution); //初始化Octree
octree.setInputCloud(cloud); //设置输入点云
octree.addPointsFromInputCloud(); //构建octree
pcl::PointXYZ searchPoint; //设置searchPoint
searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
// 体素近邻搜索
std::vector<int> pointIdxVec; //存储体素近邻搜索结果向量
if (octree.voxelSearch(searchPoint, pointIdxVec)) //执行搜索,返回结果到pointIdxVec
{
std::cout << "Neighbors within voxel search at (" << searchPoint.x << " " << searchPoint.y << " "
<< searchPoint.z << ")" << std::endl;
for (size_t i = 0; i < pointIdxVec.size(); ++i) //打印结果点坐标
std::cout << " " << cloud->points[pointIdxVec[i]].x << " " << cloud->points[pointIdxVec[i]].y << " "
<< cloud->points[pointIdxVec[i]].z << std::endl;
}
// K 近邻搜索
int K = 10;
std::vector<int> pointIdxNKNSearch; //结果点的索引的向量
std::vector<float> pointNKNSquaredDistance; //搜索点与近邻之间的距离的平方
std::cout << "K nearest neighbor search at (" << searchPoint.x << " " << searchPoint.y << " " << searchPoint.z
<< ") with K=" << K << std::endl;
if (octree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0) {
for (size_t i = 0; i < pointIdxNKNSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxNKNSearch[i]].x << " " << cloud->points[pointIdxNKNSearch[i]].y
<< " " << cloud->points[pointIdxNKNSearch[i]].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
}
// 半径内近邻搜索
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
float radius = 256.0f * rand() / (RAND_MAX + 1.0f);
std::cout << "Neighbors within radius search at (" << searchPoint.x << " " << searchPoint.y << " " << searchPoint.z
<< ") with radius=" << radius << std::endl;
if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0) {
for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxRadiusSearch[i]].x << " "
<< cloud->points[pointIdxRadiusSearch[i]].y << " " << cloud->points[pointIdxRadiusSearch[i]].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
}
}
三、无组织点云数据的空间变化检测
https://pointclouds.org/documentation/tutorials/octree_change.html#octree-change-detection
#include <pcl/point_cloud.h>
#include <pcl/octree/octree.h>
#include <iostream>
#include <vector>
#include <ctime>
int main(int argc, char **argv)
{
srand((unsigned int)time(NULL)); //用系统时间初始化随机种子
float resolution = 32.0f; // 八叉树的分辨率,即体素的大小
pcl::octree::OctreePointCloudChangeDetector<pcl::PointXYZ> octree(resolution); // 初始化空间变化检测对象
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudA(
new pcl::PointCloud<pcl::PointXYZ>); //创建点云实例cloudA生成的点云数据用于建立八叉树octree对象
cloudA->width = 128;
cloudA->height = 1;
cloudA->points.resize(cloudA->width * cloudA->height);
for (size_t i = 0; i < cloudA->points.size(); ++i) {
cloudA->points[i].x = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudA->points[i].y = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudA->points[i].z = 64.0f * rand() / (RAND_MAX + 1.0f);
}
octree.setInputCloud(cloudA); //设置输入点云
octree.addPointsFromInputCloud(); //从输入点云构建八叉树
octree.switchBuffers(); // 交换八叉树的缓冲,但是CloudA对应的八叉树结构仍然在内存中
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudB(new pcl::PointCloud<pcl::PointXYZ>);
cloudB->width = 128;
cloudB->height = 1;
cloudB->points.resize(cloudB->width * cloudB->height);
for (size_t i = 0; i < cloudB->points.size(); ++i) {
cloudB->points[i].x = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudB->points[i].y = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudB->points[i].z = 64.0f * rand() / (RAND_MAX + 1.0f);
}
octree.setInputCloud(cloudB);
octree.addPointsFromInputCloud();
std::vector<int> newPointIdxVector; //存储新添加的索引的向量
octree.getPointIndicesFromNewVoxels(newPointIdxVector); //获取cloudB相较于cloudA变化的点集
std::cout << "Output from getPointIndicesFromNewVoxels:" << std::endl;
for (size_t i = 0; i < newPointIdxVector.size(); ++i)
std::cout << i << "# Index:" << newPointIdxVector[i] << " Point:" << cloudB->points[newPointIdxVector[i]].x
<< " " << cloudB->points[newPointIdxVector[i]].y << " " << cloudB->points[newPointIdxVector[i]].z
<< std::endl;
}
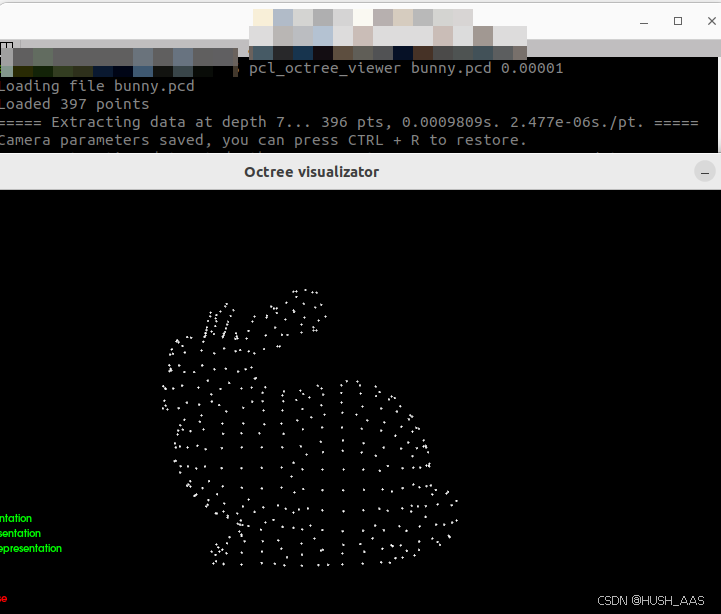
pcl_octree_viewer使用
- a -> 增加显示深度(减小体素大小)
- z -> 降低显示深度 (增加体素大小)
- v -> 隐藏或显示octree立方体
- b -> 隐藏或显示体素中心店
- n -> 隐藏或显示原始点云
- q -> 退出
参考
https://robot.czxy.com/docs/pcl/chapter01/decomposition/#_4
https://github.com/HuangCongQing/pcl-learning/blob/master/03octree/1point_cloud_compression/point_cloud_compression.cpp
https://pointclouds.org/documentation/group__octree.html

















 3138
3138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









