 DTS配置错误引发GMAC网卡调试难题:排查与解决过程
DTS配置错误引发GMAC网卡调试难题:排查与解决过程





 本文详细讲述了在嵌入式开发中,如何通过DTS配置问题排查与解决GMAC网卡启动失败的问题,涉及晶振测量、DMA初始化失败和最终的配置调整。重点在于DTS配置对硬件交互的影响及调试经验分享。
本文详细讲述了在嵌入式开发中,如何通过DTS配置问题排查与解决GMAC网卡启动失败的问题,涉及晶振测量、DMA初始化失败和最终的配置调整。重点在于DTS配置对硬件交互的影响及调试经验分享。
一、原理图
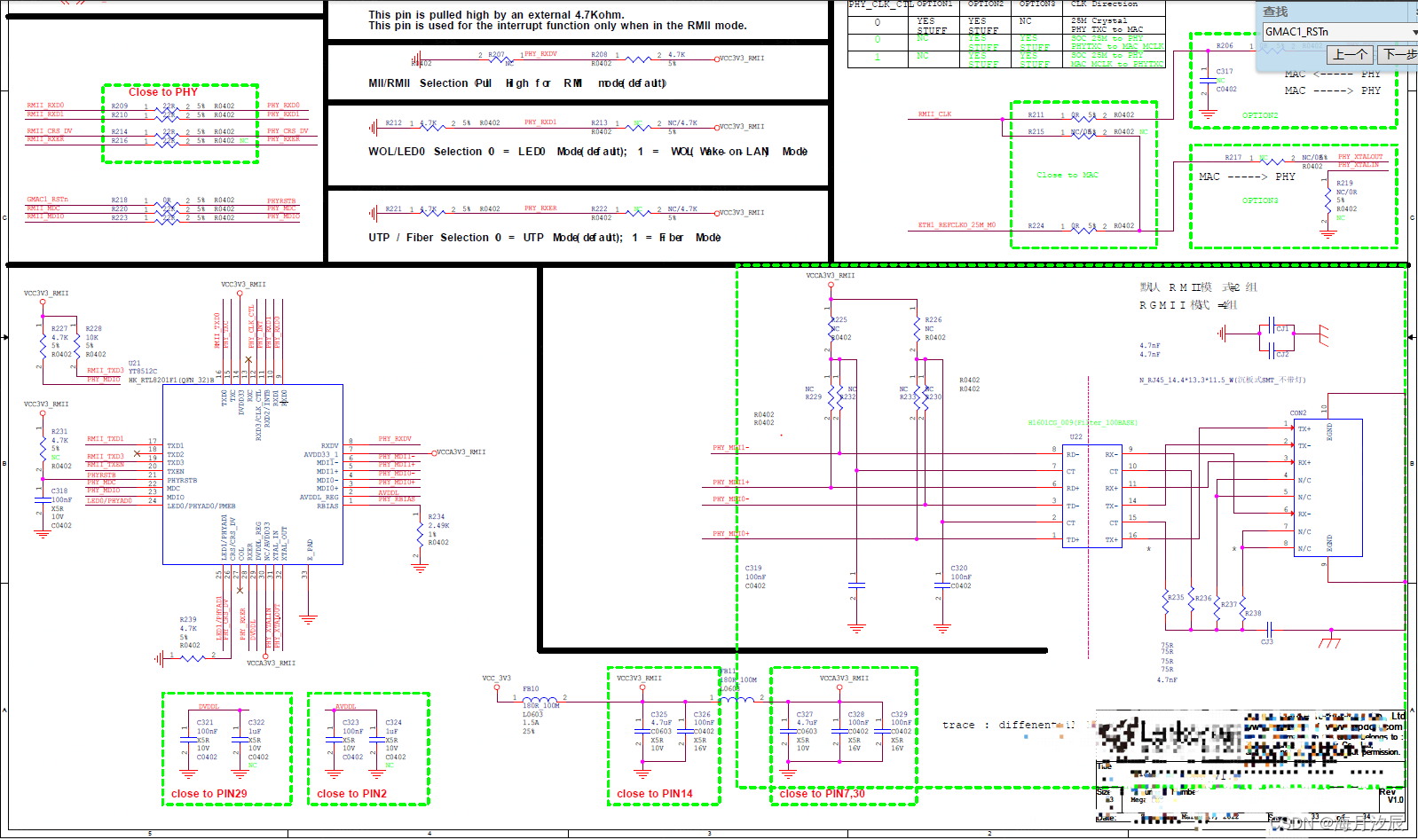
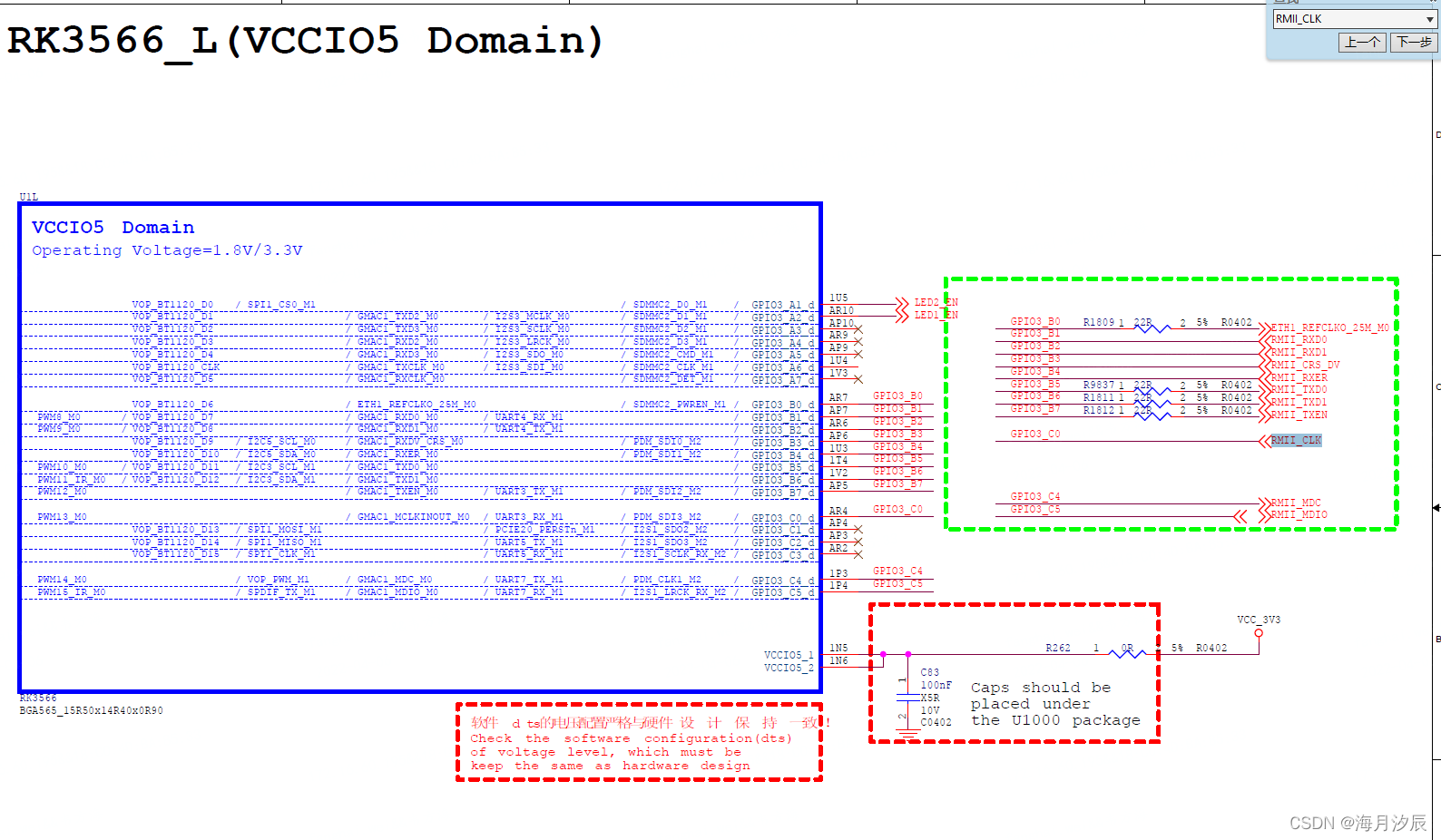
二、dts
&gmac1_clkin{
clock-frequency = <50000000>;
status = "okay";
};
&gmac1 {
phy-mode = "rmii";
clock_in_out = "input";
snps,reset-gpio = <&gpio4 RK_PC2 GPIO_ACTIVE_LOW>;
snps,reset-active-low;
snps,reset-delays-us = <0 20000 100000>;
assigned-clocks = <&cru SCLK_GMAC1_RX_TX>, <&cru SCLK_GMAC1>;
assigned-clock-parents = <&cru SCLK_GMAC1_RMII_SPEED>, <&gmac1_clkin>;
pinctrl-names = "default";
pinctrl-0 = <&gmac1m0_miim
&gmac1m0_clkinout
&gmac1m0_rx_bus2
&gmac1m0_tx_bus2
& 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7601
7601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









