




 本文概述了SLAM课程中关于单目相机的针孔模型,包括畸变校正和像素坐标转换过程。深入探讨了双目相机的视差测量与深度计算,以及批量状态估计中的最大后验估计和最大似然估计。此外,介绍了opencv、ceres和g2o库在视觉SLAM中的应用,并触及了3D视觉技术,如双目视觉和RGB-D视觉的实例。
本文概述了SLAM课程中关于单目相机的针孔模型,包括畸变校正和像素坐标转换过程。深入探讨了双目相机的视差测量与深度计算,以及批量状态估计中的最大后验估计和最大似然估计。此外,介绍了opencv、ceres和g2o库在视觉SLAM中的应用,并触及了3D视觉技术,如双目视觉和RGB-D视觉的实例。
0. 内容
对应于十四讲中的第5讲和第6讲
回顾十四讲P24-26
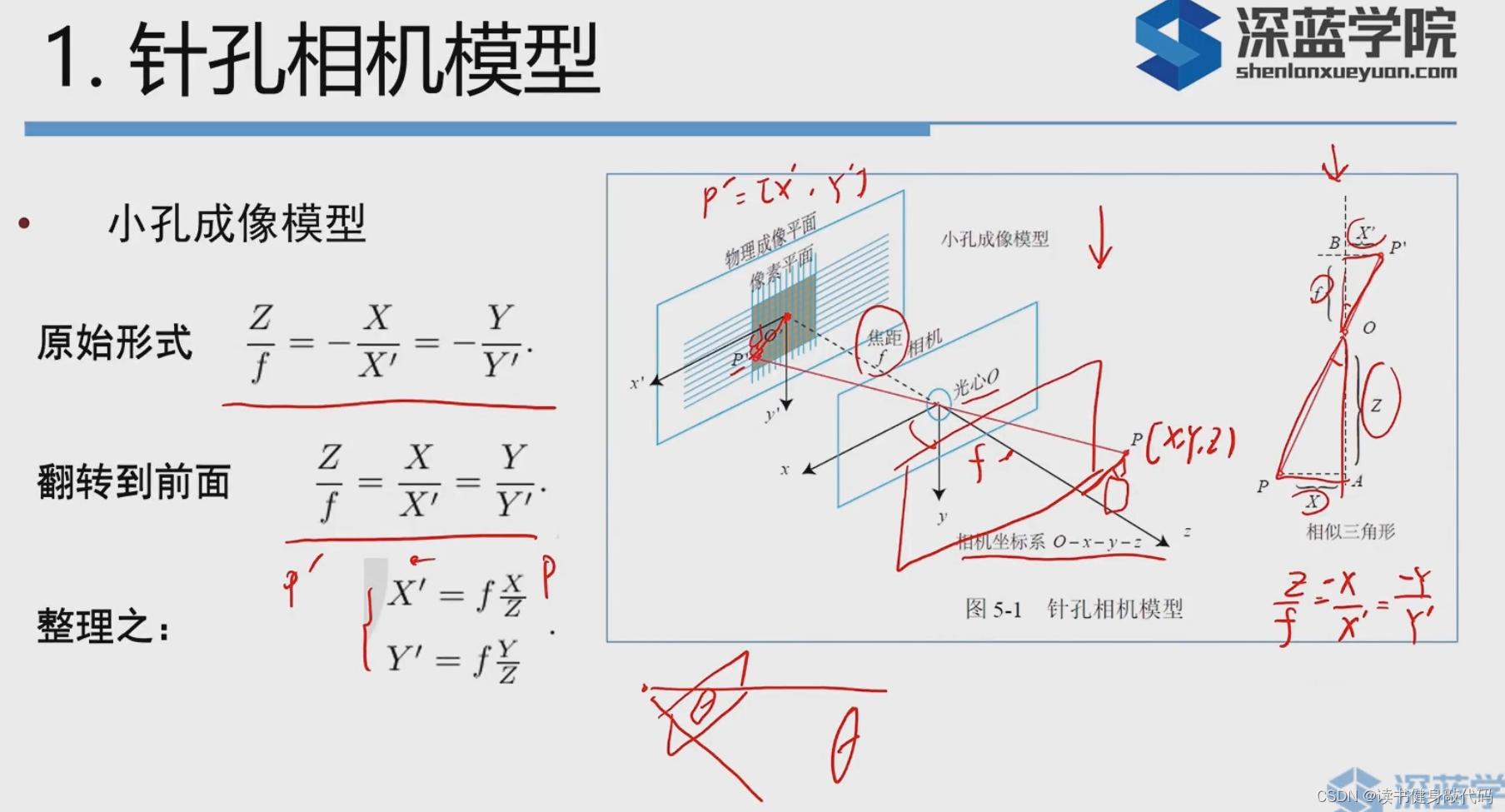
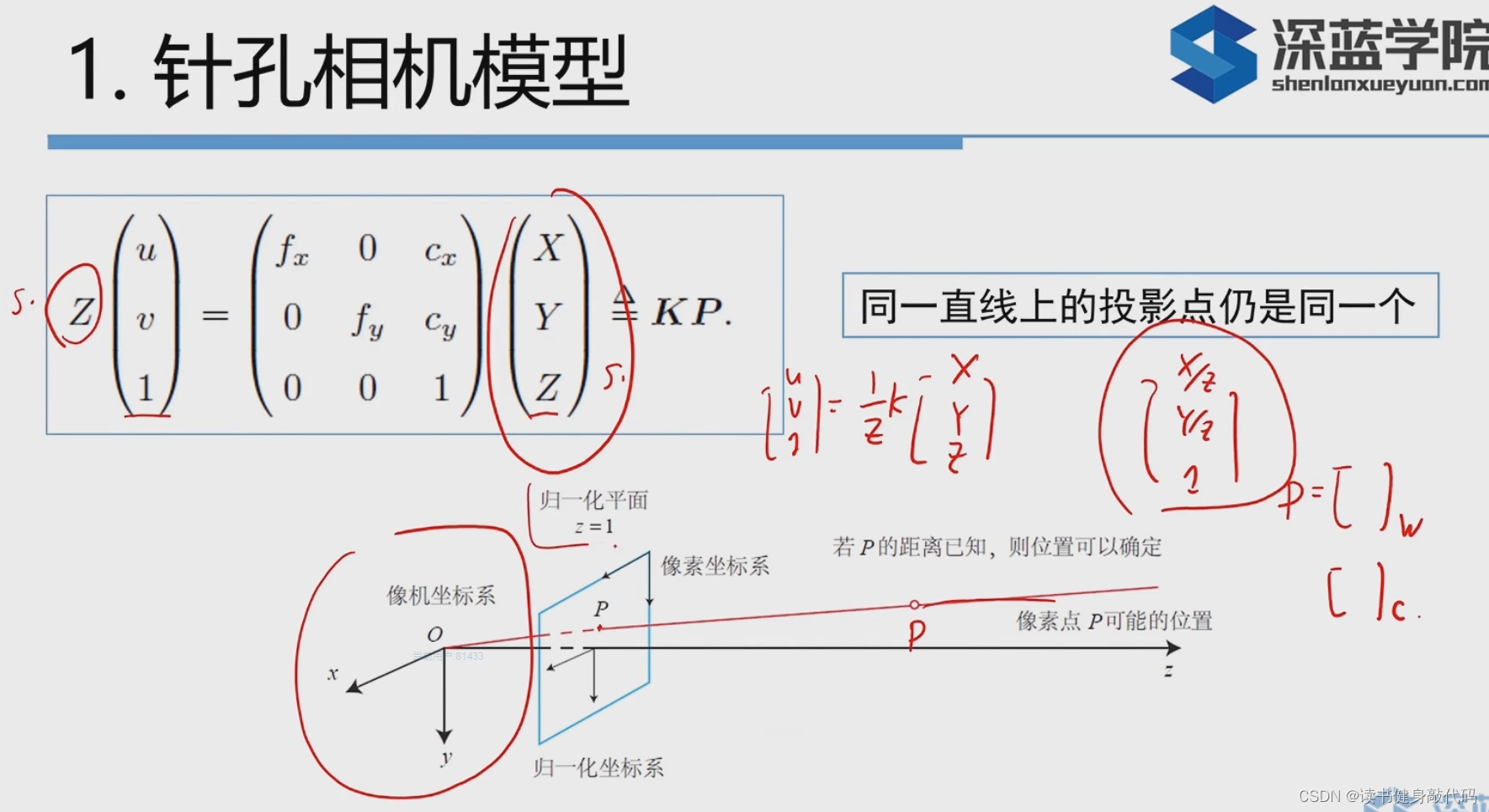
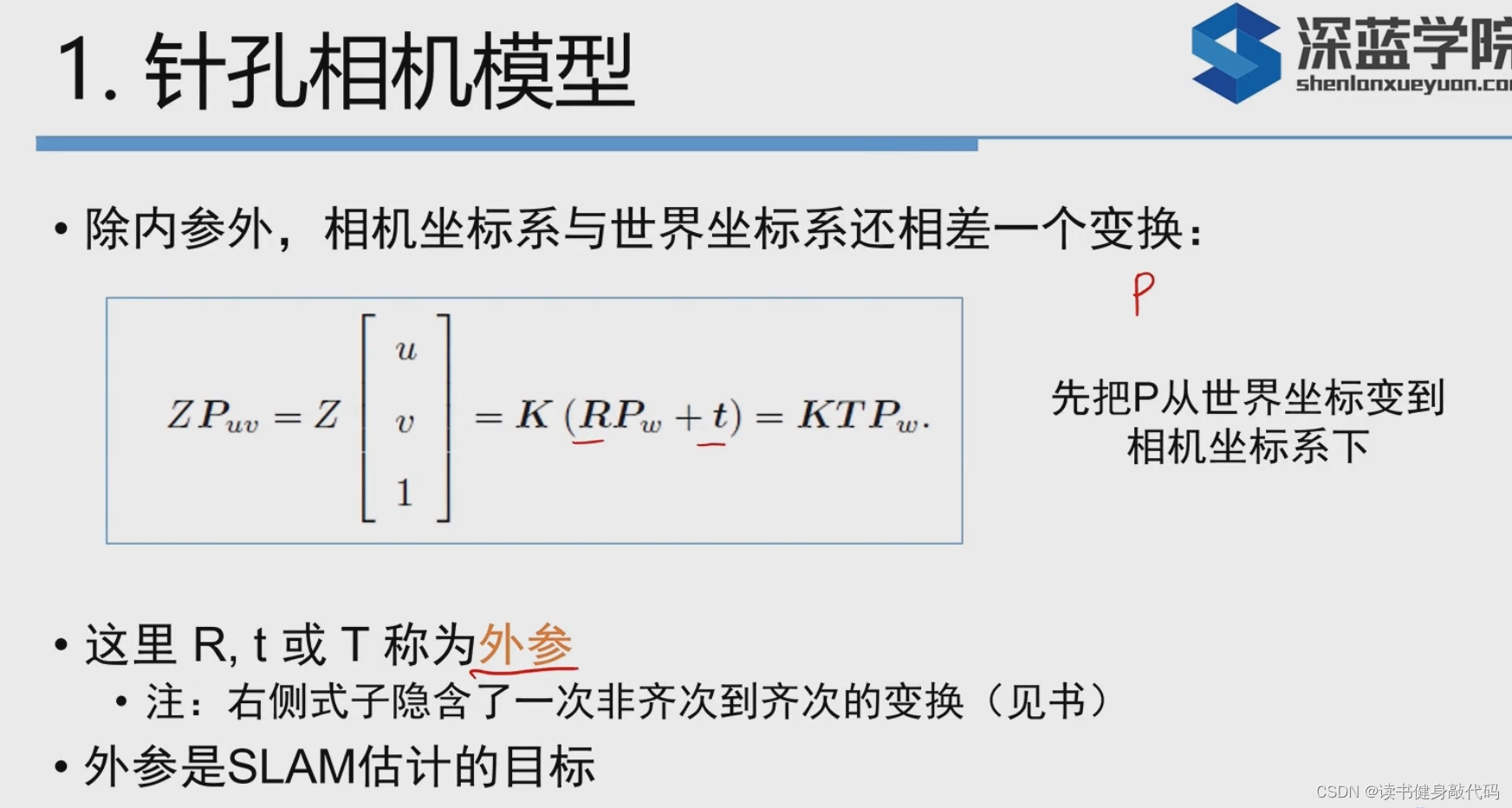
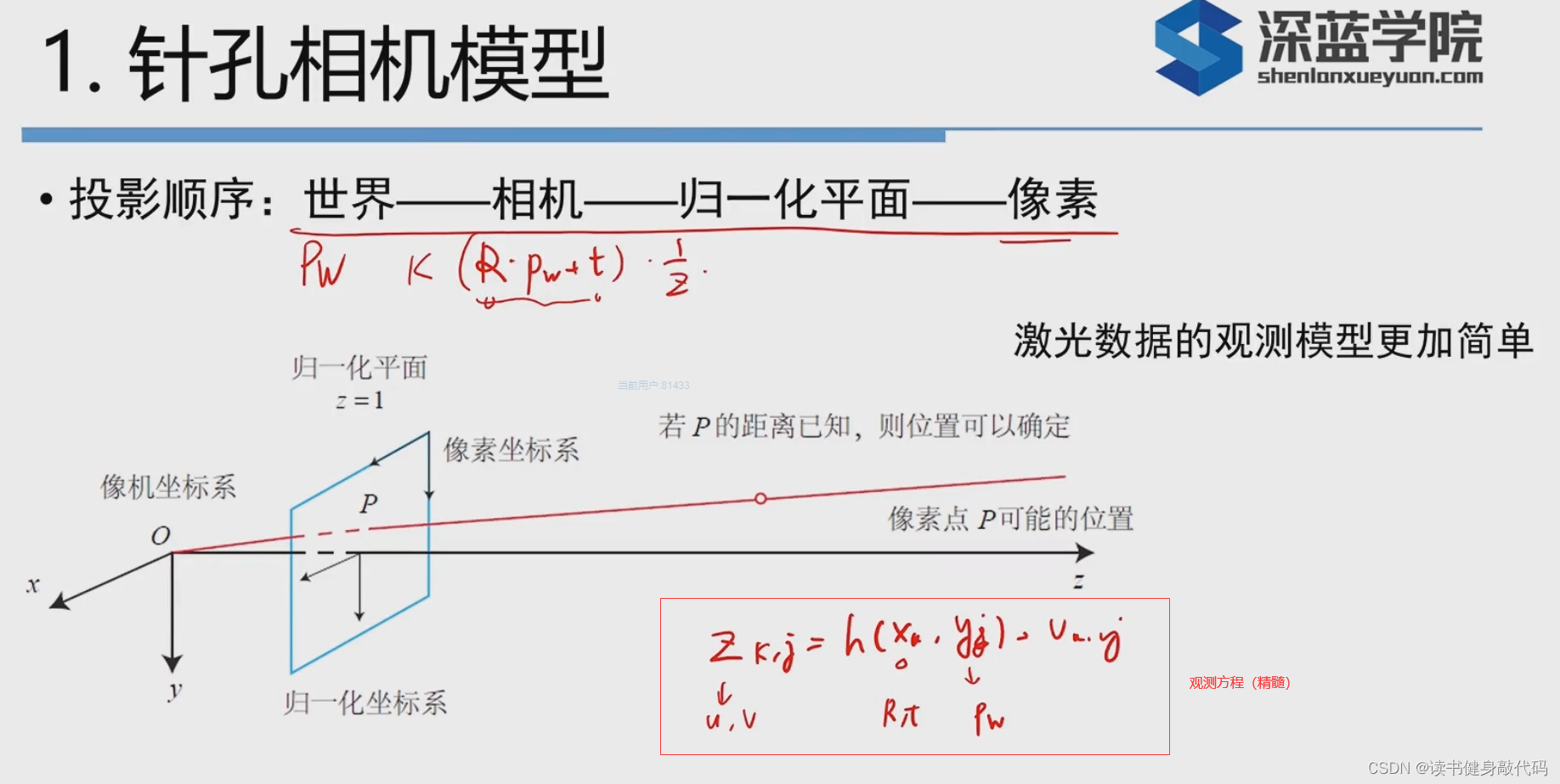
1. 针孔相机模型
但是针孔镜头会引入畸变:
1.单目相机

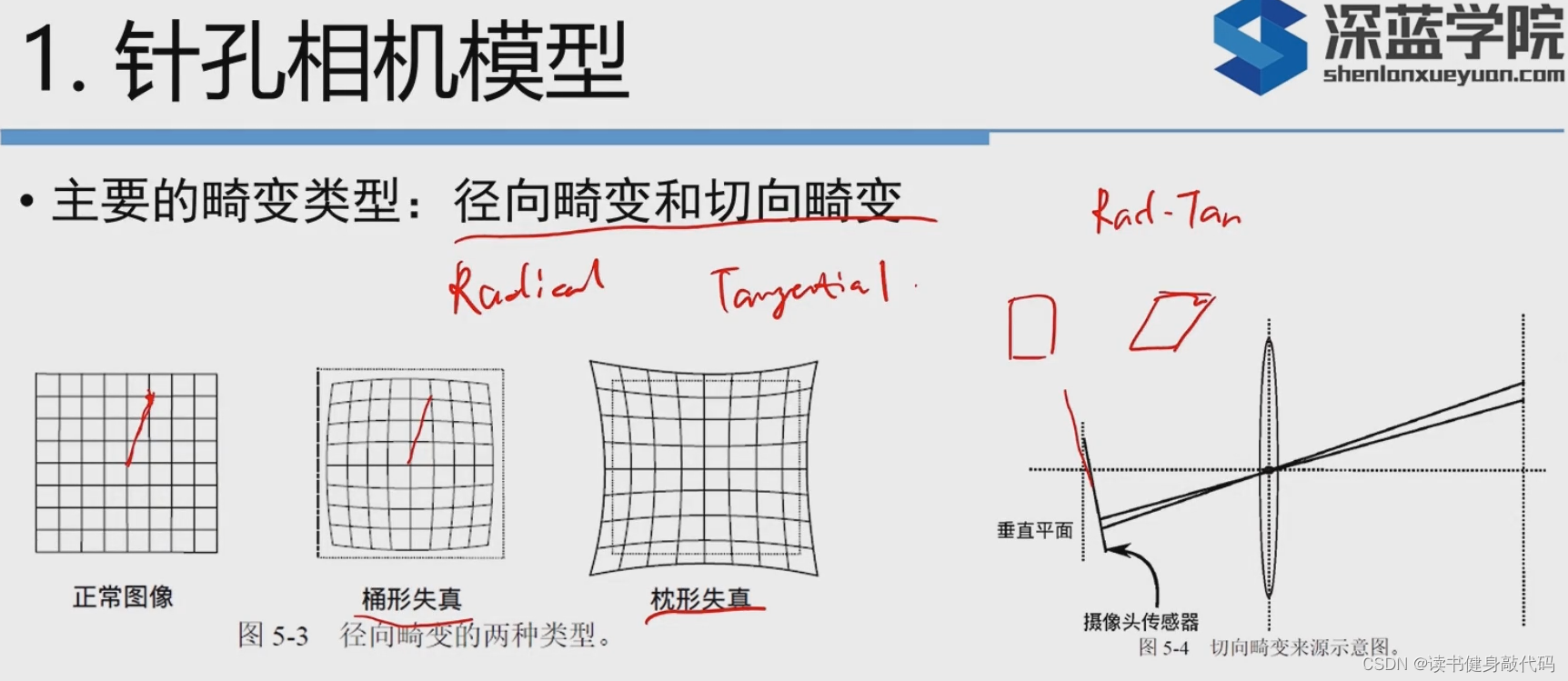
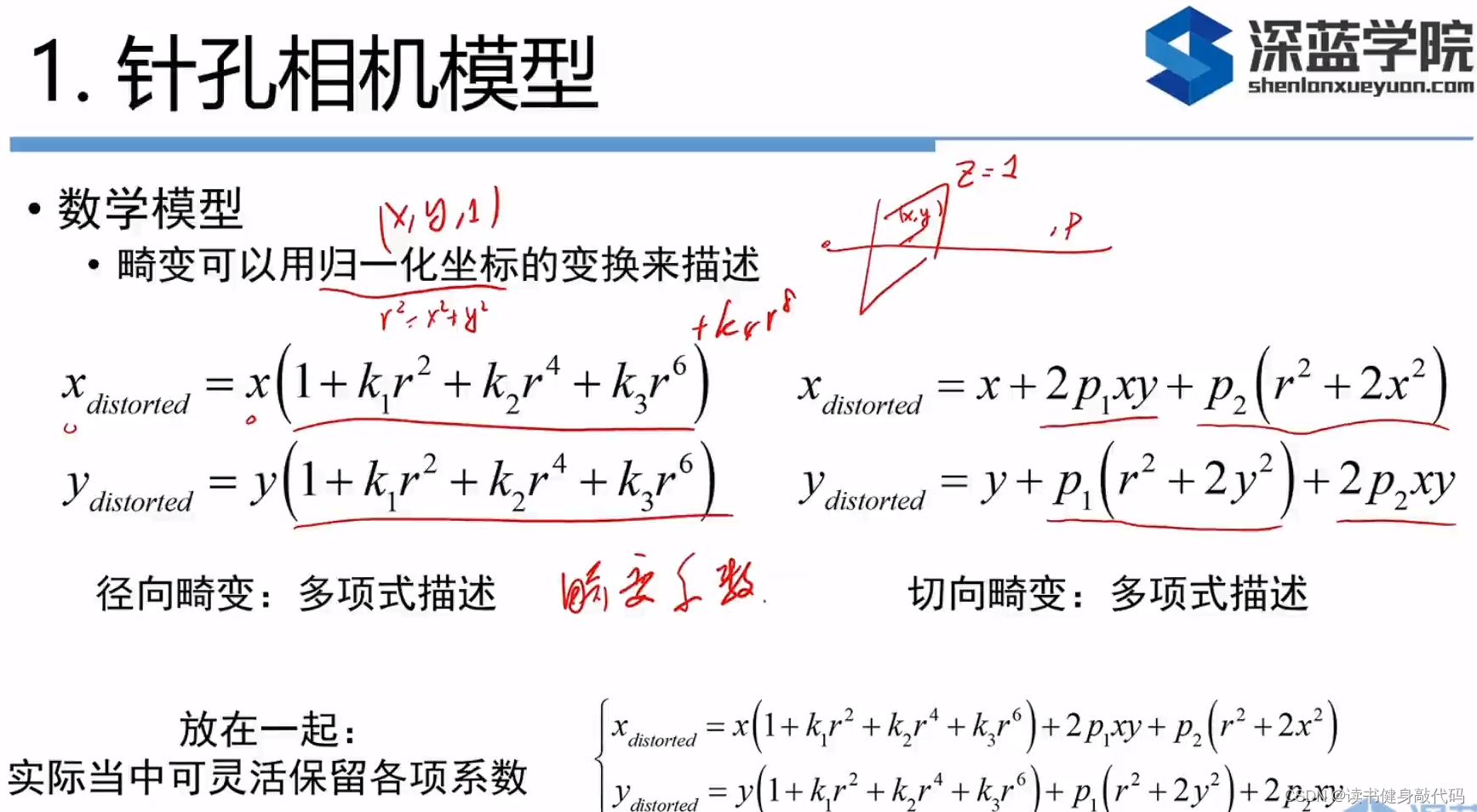
上面使用了5个畸变项,实际中可以灵活选用,如只使用 k 1 , p 1 , p 2 k_1,p_1,p_2 k1,p1,p2。在SLAM中通常选择先对图像去畸变,再讨论图像上的点
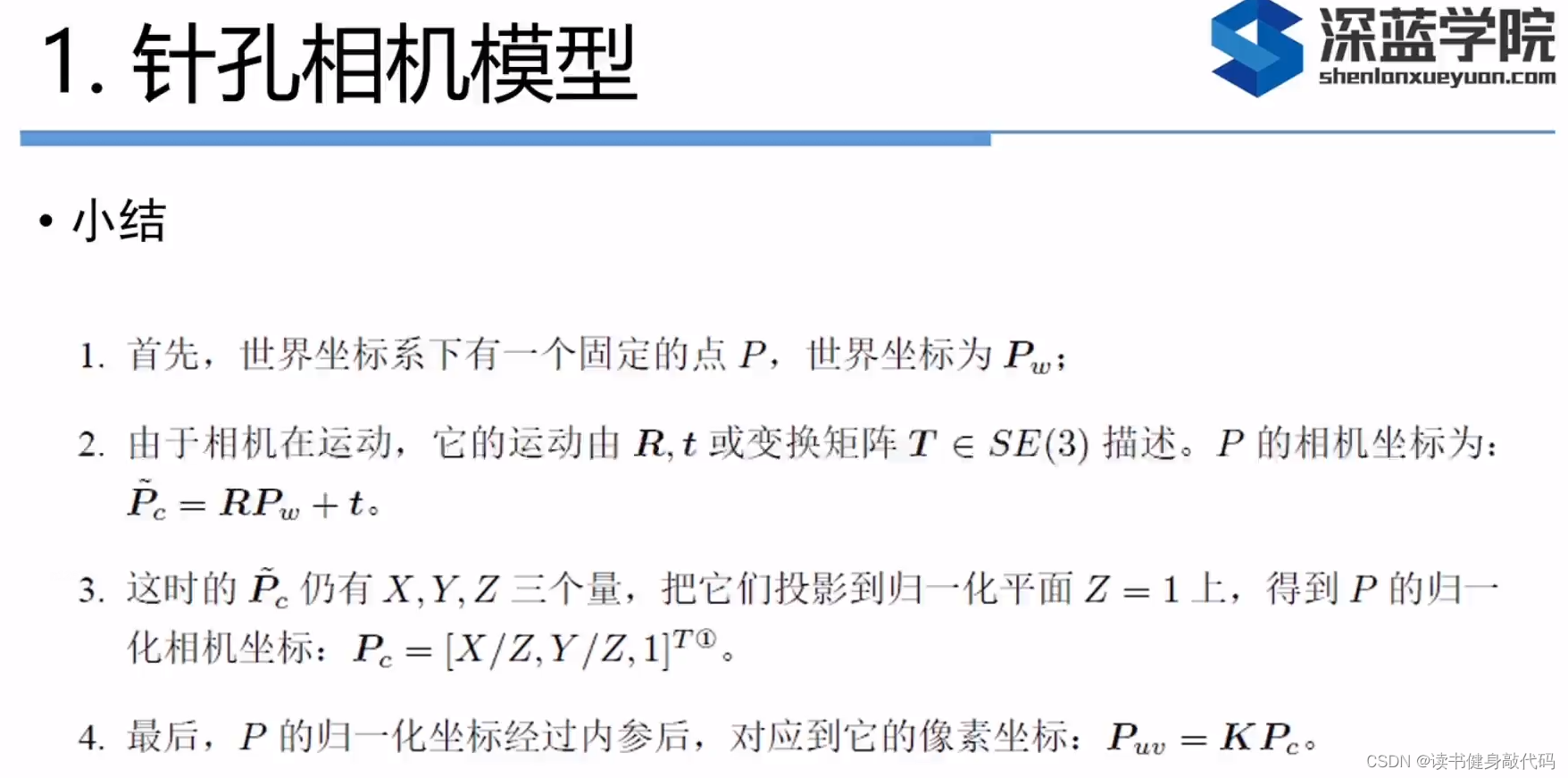
小结:
\quad 由世界坐标系中的点的坐标 P w ( X , Y , Z ) P_w(X,Y,Z) Pw(X,Y,Z)转换到像素的坐标 P u v P_{uv} Puv要经历以下的变换:
1. \quad 世界 P w P_w Pw->
2. \quad 相机 R P w + t RP_w+t RPw+t->
3. \quad 归一化平面 1 Z ( R P w + t ) = ( X ′ , Y ′ ) \frac{1}{Z}(RP_w+t)=(X', Y') Z1(RPw+t)=(X′,Y′)->
4. \quad 若有畸变则加入畸变模型 P ′ = ( X ′ , Y ′ ) P'=(X', Y') P′=(X′,Y′)-> ( X d i s t o r t e d , Y d i s t o r t e d ) (X_{distorted},Y_{distorted}) (Xdistorted,Ydistorted)->
5. \quad 像素:
P u v = K P ′ = { u = f x x d i s t o r t e d + c x v = f y y d i s t o r t e d + c y P_{uv}=KP'= \left\{ \begin{array}{l} u=f_xx_{distorted}+c_x \\ v=f_yy_{distorted}+c_y \end{array} \right . Puv=KP′={
u=fxxdistorted+c
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 773
773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









