






 博客介绍了光度立体法,利用不同光照下多幅图像对物体表面进行3D重建以检测缺陷。还提及视野大小、精度、像素计算等参数,镜头接口、分辨率、视野范围要求,偏振片和滤光片作用,测量项目镜头与光源选择,互补光特性,以及运动定位方法和要点。
博客介绍了光度立体法,利用不同光照下多幅图像对物体表面进行3D重建以检测缺陷。还提及视野大小、精度、像素计算等参数,镜头接口、分辨率、视野范围要求,偏振片和滤光片作用,测量项目镜头与光源选择,互补光特性,以及运动定位方法和要点。
光度立体法
采用不同光照条件下拍摄的多幅图像,利用光度立体技术对物体表面进行3D重建,可在复杂图像中轻松找到表面缺陷。
视野大小 1210mm,精度 0.02mm
(12/0.02)(10/0.02) = 30w像素
缺陷检测并不会只用一个像素表示一个精度,而是乘以3-4倍。
- 镜头接口与相机接口不一致,加5mm接圈,否则怎么调焦距都不清晰;
- 镜头分辨率一定要大于相机分辨率;
- 镜头视野范围大于等于相机尺寸,小于有黑边。
偏振片和滤光片(防止反光和过滤不同波长的光)
测量项目要用远心或者低畸变镜头+背光源
互补光 色环中正好相对的颜色,使用互补色光线照射物体时,物体呈现的颜色将接近黑色。
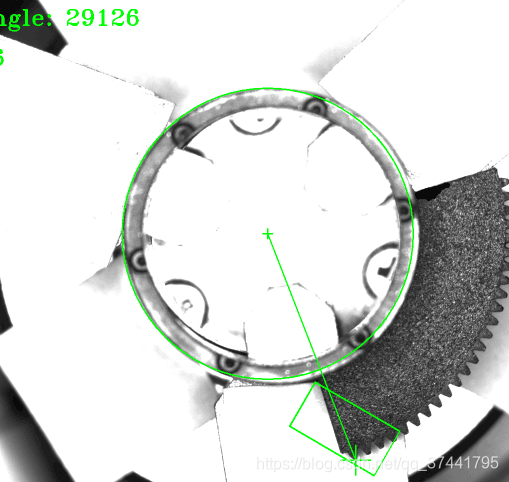
运动定位 旋转的,两步可以完成,第一步,抓圆(XLD特征等),第二步,模板定位。然后圆心跟模板定位点连线,计算角度输出。这样做的稳定性好,跟模板大小无关,日后好维护。
不要直接用模板的输出作为输出角,那样每次做模板都要在同样的角度。没有圆,要找一个稳定的特征作为旋转的正中心,这个点很重要,你的中心错了,那么你的角度一定错。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









