



在看四旋翼轨迹生成的论文时遇到了differential flatness,相关中文资料较少,看了几行英文论文,写下总结
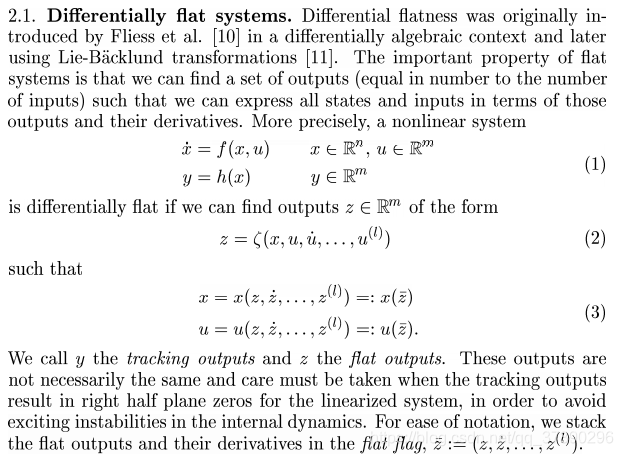
微分平坦系统的重要特性:
可以找到一个输出集合[输出的个数等于系统输入的个数],[以这些输出和它们的导数来]表达
所有的状态和输入。
*tracking output和flat output并不一定相同
在看四旋翼轨迹生成的论文时遇到了differential flatness,相关中文资料较少,看了几行英文论文,写下总结
微分平坦系统的重要特性:
可以找到一个输出集合[输出的个数等于系统输入的个数],[以这些输出和它们的导数来]表达
所有的状态和输入。
*tracking output和flat output并不一定相同
 4199
480
4199
480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























