




类 SIFTKeypoint 是将二维图像中的 SIFT 算子调整后移植到 3D 空间的 SIFT算子的实现。输入为带有 XYZ 坐标值和强度的点云 , 输出为点云中的 SIFT 关键点。
class pcl:: SIFTKeypoint< PointlnT , PointOutT>
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/keypoints/sift_keypoint.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
#pragma comment(lib,"User32.lib")
#pragma comment(lib, "gdi32.lib")
using namespace std;
namespace pcl
{
template<>
struct SIFTKeypointFieldSelector<PointXYZ>
{
inline float
operator () (const PointXYZ &p) const
{
return p.z;
}
};
}
int
main(int argc, char *argv[])
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_xyz(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("pig.pcd", *cloud_xyz);
const float min_scale = stof("0.01"); //设置尺度空间中最小尺度的标准偏差
const int n_octaves = stof("6"); //设置高斯金字塔组(octave)的数目
const int n_scales_per_octave = stof("4"); //设置每组(octave)计算的尺度
const float min_contrast = stof("0.01"); //设置限制关键点检测的阈值
pcl::SIFTKeypoint<pcl::PointXYZ, pcl::PointWithScale> sift;//创建sift关键点检测对象
pcl::PointCloud<pcl::PointWithScale> result;
sift.setInputCloud(cloud_xyz);//设置输入点云
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
sift.setSearchMethod(tree);//创建一个空的kd树对象tree,并把它传递给sift检测对象
sift.setScales(min_scale, n_octaves, n_scales_per_octave);//指定搜索关键点的尺度范围
sift.setMinimumContrast(min_contrast);//设置限制关键点检测的阈值
sift.compute(result);//执行sift关键点检测,保存结果在result
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_temp(new pcl::PointCloud<pcl::PointXYZ>);
copyPointCloud(result, *cloud_temp);//将点类型pcl::PointWithScale的数据转换为点类型pcl::PointXYZ的数据
//可视化输入点云和关键点
pcl::visualization::PCLVisualizer viewer("Sift keypoint");
viewer.setBackgroundColor(255, 255, 255);
viewer.addPointCloud(cloud_xyz, "cloud");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 0, "cloud");
viewer.addPointCloud(cloud_temp, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 9, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 255, "keypoints");
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
return 0;
}
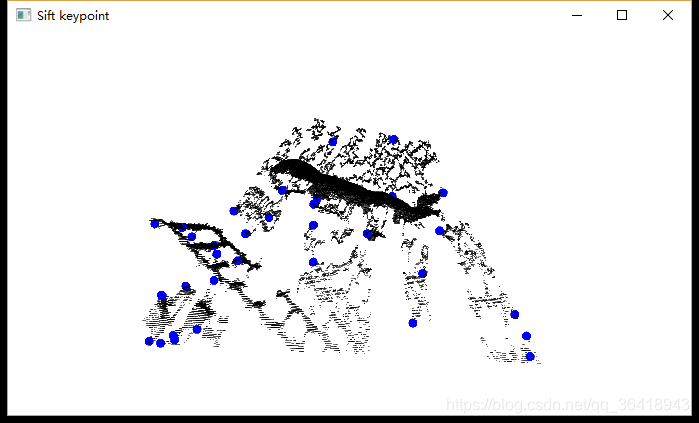
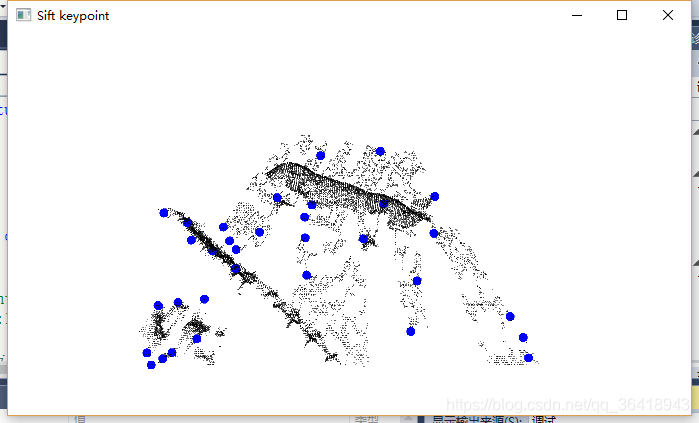
如果先进行VoxelGrid滤波,发现检测出的特征点相同
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/keypoints/sift_keypoint.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
#pragma comment(lib,"User32.lib")
#pragma comment(lib, "gdi32.lib")
using namespace std;
namespace pcl
{
template<>
struct SIFTKeypointFieldSelector<PointXYZ>
{
inline float
operator () (const PointXYZ &p) const
{
return p.z;
}
};
}
int
main(int argc, char *argv[])
{
//pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_xyz(new pcl::PointCloud<pcl::PointXYZ>);
//pcl::io::loadPCDFile("pig.pcd", *cloud_xyz);
//先进行VoxelGrid滤波,发现检测出的特征点相同
pcl::PCLPointCloud2::Ptr cloud(new pcl::PCLPointCloud2());
pcl::PCLPointCloud2::Ptr cloud_filtered(new pcl::PCLPointCloud2());
// 填入点云数据
pcl::PCDReader reader;
// 把路径改为自己存放文件的路径
reader.read("pig.pcd", *cloud); // 记住要事先下载这个数据集!
std::cerr << "PointCloud before filtering: " << cloud->width * cloud->height
<< " data points (" << pcl::getFieldsList(*cloud) << ").";
// 创建滤波器对象
pcl::VoxelGrid<pcl::PCLPointCloud2> sor;
sor.setInputCloud(cloud);
sor.setLeafSize(0.01f, 0.01f, 0.01f);//设置滤波时创建的体素体积为 1cm*1cm*1cm的立方体
sor.filter(*cloud_filtered);
std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height
<< " data points (" << pcl::getFieldsList(*cloud_filtered) << ").";
// 保存结果
pcl::PCDWriter writer;
writer.write("2f.pcd", *cloud_filtered, Eigen::Vector4f::Zero(), Eigen::Quaternionf::Identity(), false);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_xyz(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("2f.pcd", *cloud_xyz);
const float min_scale = stof("0.01"); //设置尺度空间中最小尺度的标准偏差
const int n_octaves = stof("6"); //设置高斯金字塔组(octave)的数目
const int n_scales_per_octave = stof("4"); //设置每组(octave)计算的尺度
const float min_contrast = stof("0.01"); //设置限制关键点检测的阈值
pcl::SIFTKeypoint<pcl::PointXYZ, pcl::PointWithScale> sift;//创建sift关键点检测对象
pcl::PointCloud<pcl::PointWithScale> result;
sift.setInputCloud(cloud_xyz);//设置输入点云
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
sift.setSearchMethod(tree);//创建一个空的kd树对象tree,并把它传递给sift检测对象
sift.setScales(min_scale, n_octaves, n_scales_per_octave);//指定搜索关键点的尺度范围
sift.setMinimumContrast(min_contrast);//设置限制关键点检测的阈值
sift.compute(result);//执行sift关键点检测,保存结果在result
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_temp(new pcl::PointCloud<pcl::PointXYZ>);
copyPointCloud(result, *cloud_temp);//将点类型pcl::PointWithScale的数据转换为点类型pcl::PointXYZ的数据
//可视化输入点云和关键点
pcl::visualization::PCLVisualizer viewer("Sift keypoint");
viewer.setBackgroundColor(255, 255, 255);
viewer.addPointCloud(cloud_xyz, "cloud");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 0, "cloud");
viewer.addPointCloud(cloud_temp, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 9, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 255, "keypoints");
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
return 0;
}


















 2815
2815

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









