









论文《Lite-HRNet: A Lightweight High-Resolution Network》提出者用于人体姿态估计,本文将其用于语义分割训练,损失无法下降,基本全无法提取,本文仅作为结构学习记录,若有读者找出原因请不吝指教。
实时语义分割之BiSeNetv2(2020)结构原理解析及建筑物提取实践
文章目录
概要
Lite-HRNet是针对实时语义分割任务优化的轻量级网络,其核心思想是在高分辨率特征保持与计算效率之间取得平衡。相比原版HRNet,通过引入多分辨率特征交互机制与通道重参数化技术。
提示: (1)论文地址:https://arxiv.org/abs/2104.06403 (2)Github网址:https://github.com/HRNet/Lite-HRNet (3)本人打包好数据可运行代码:Lite-HRNet.zip 链接: https://pan.baidu.com/s/1ZJpGchNDfLMosCOBNKt65A?pwd=v7yf 提取码: v7yf
理论知识
整体架构流程

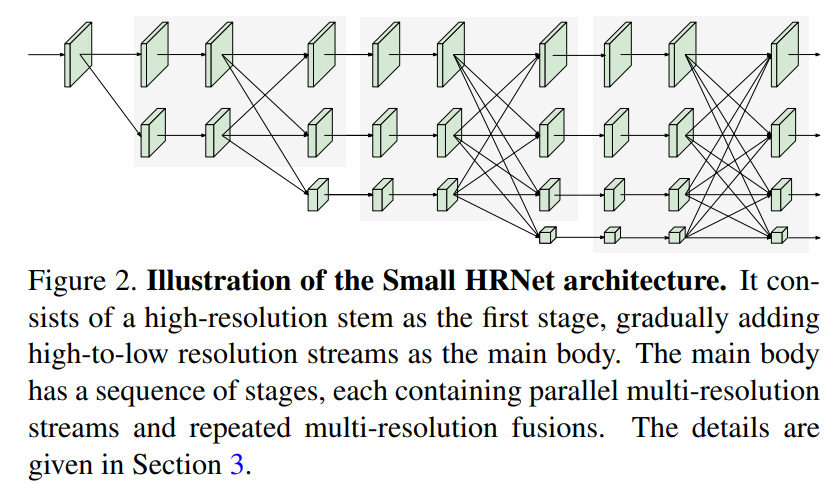
LiteHRNet模型结构示意如下图2。灰色块状部分为stage2-4,它由一个高分辨率的主干作为第一阶段,逐渐添加高到低分辨率流作为主体。主体包含一系列阶段,每个阶段包含并行的多分辨率流和重复的多分辨率融合。
class LiteHRNet(nn.Module):
def __init__(self, num_class=1, n_channel=3, base_ch=40, arch_type='litehrnet18', repeat=2, act_type='relu'):
......
self.stem = nn.Sequential(
ConvBNAct(n_channel, 32, 3, 2, act_type=act_type),
ShuffleBlock(32, base_ch, 2, act_type)
)
self.stage1_down = DSConvBNAct(base_ch, base_ch*2, 3, 2, act_type=act_type)
self.stage2 = StageBlock(base_ch, 2, repeat, num_modules[0], act_type)
self.stage3 = StageBlock(base_ch, 3, repeat, num_modules[1], act_type)
self.stage4 = StageBlock(base_ch, 4, repeat, num_modules[2], act_type)
self.rep_head = RepresentationHead(base_ch, num_class, 4, act_type)
def forward(self, x):
x = self.stem(x)
x2 = self.stage1_down(x)
feats = [x, x2]
feats = self.stage2(feats)
feats = self.stage3(feats)
feats = self.stage4(feats)
x = self.rep_head(feats)
......
return x
关键模块解析
| 模块名称 | 功能描述 | 结构在代码定义 | 参数量占比 |
|---|---|---|---|
| Stem模块 | 初始特征提取与通道扩展 | class ShuffleBlock | 8% |
| StageBlock | 多分辨率特征交互核心单元 | class StageBlock | 65% |
| CrossResolutionWeight | 跨分辨率特征权重生成 | class CrossResolutionWeightModule | 12% |
| CCWBlock | 通道-空间联合注意力计算 | class CCWBlock | 10% |
| FusionBlock | 多分支特征融合 | class FusionBlock | 5% |
以下关键模块解析时只取形,舍去具体操作。
Stem模块:轻量级数据输入设计(ShuffleBlock)
class ShuffleBlock(nn.Module):
def __init__(self, in_ch, out_ch, stride, act_type):
# 通道分割:将输入分为左右两部分
in_ch_l = in_ch//2
self.left_branch = ConvBNAct(in_ch_l, out_ch//2, 1, stride)
self.right_branch = nn.Sequential(
ConvBNAct(in_ch-in_ch_l, out_ch//2, 1),
DWConvBNAct(..., stride), # 深度可分离卷积
ConvBNAct(...)
)
设计:
-
通道分割策略:将输入通道对半拆分,左分支保持原分辨率,右分支进行深度卷积下采样,减少50%计算量。
-
通道混洗(Channel Shuffle):促进左右分支间的信息交互,避免特征僵化。
-
深度可分离卷积:相比标准卷积减少8倍参数量。
StageBlock:多分辨率特征交互
class StageBlock(nn.Module):
def __init__(self, base_ch, stage, repeat, num_modules, act_type):
super().__init__()
crw_module = CrossResolutionWeightModule(crw_ch, act_type)
ccw_block = nn.ModuleList([CCWBlock(chs[j], chs[j], 1, act_type) for _ in range(repeat)])
# Fusion Block
fusion_block = FusionBlock(base_ch, stage, extra_output, act_type)
self.stage_blocks.append(crw_module)
self.stage_blocks.append(ccw_blocks)
self.stage_blocks.append(fusion_block)
....
def forward(self, feats):
for i in range(len(self.stage_blocks) // 3):
crw_module = self.stage_blocks[i*3]
ccw_blocks = self.stage_blocks[i*3+1]
fusion_block = self.stage_blocks[i*3+2]
cr_weight = crw_module(feats)
for j, ccw_block in enumerate(ccw_blocks):
for m in ccw_block:
feats[j] = m(feats[j], cr_weight[j])
feats = fusion_block(feats)
return feats
特征提取时,StageBlock 类依次通过3个模块进行特征处理。
- 跨分辨率权重生成: 通过 CrossResolutionWeightModule 生成跨分辨率权重。
- 特征处理: 对于每个阶段的 CCWBlock,使用生成的权重处理输入特征。
- 特征融合: 最后,通过融合块fusion_block将处理后的特征进行合并。
CCWBlock:双路特征增强单元
class CCWBlock(nn.Module):
def forward(self, feats, cr_weight):
# 特征分割
feats_l, feats_r = split(feats)
# 左分支:恒等映射或1x1卷积
feats_l = self.left_branch(feats_l)
# 右分支:空间权重调制
feats_r = feats_r * cr_weight # 跨分辨率权重
feats_r = self.right_branch(feats_r)
spatial_weight = self.sw(feats_r) # 空间注意力
feats_r = feats_r * spatial_weight
return shuffle(concat(feats_l, feats_r))
设计:
-
跨分辨率权重融合:接收来自CrossResolutionWeight模块的权重图,实现多尺度特征校准。
-
空间注意力机制:通过SpatialWeightModule动态调整特征图各位置的重要性。
-
双路异构设计:左路保持特征完整性,右路增强局部细节,兼顾效率与精度。
CrossResolutionWeight:多尺度关联模块
class CrossResolutionWeightModule(nn.Module):
def forward(self, feats):
# 多分辨率特征池化
pooled_feats = [adaptive_pool(feat) for feat in feats]
concat_feat = torch.cat(pooled_feats, dim=1)
# 权重生成
weight = self.conv(concat_feat) # 1x1卷积+sigmoid
return split(weight)
设计:
-
自适应池化层:将不同分辨率的特征图统一到相同尺度。
-
通道压缩:采用8倍通道缩减比,生成紧凑的权重表示。
-
动态权重分配:为每个分辨率分支生成独立的注意力图。
FusionBlock:多流特征融合
class FusionBlock(nn.Module):
def __init__(self, base_ch, stage, extra_output, act_type):
# 构建上采样和下采样流
self.stream1 = [DownsampleBlock(...) for _ in ...]
self.stream2 = [UpsampleBlock(...) for _ in ...]
def forward(self, feats):
# 多分辨率特征融合
x1 = stream1[0](feats[0]) + stream2[0](feats[1])
x2 = stream1[1](feats[0]) + stream2[1](feats[1])
...
设计:
-
双向特征流:包含上采样(UpsampleBlock)和下采样(DownsampleBlock)两条通路。
-
残差连接结构:通过Element-wise Add实现多尺度特征融合。
-
可扩展架构:支持2-4个输入分支的动态融合。
模型实践
训练数据准备
提示:云盘代码已内置少量高分二号卫星影像建筑物数据集
训练数据分为原始影像和标签(二值化,0和255),均位于Sample文件夹内,本示例数据为尺度不一致,将在训练数据导入时批量规范为256*256,数据相对路径为:
Sample\build\train\ IMG_T1
------------------\ IMG_LABEL
-------------\val \ IMG_T1
------------------\IMG_LABEL
模型训练
运行dp0_train.py,模型开始训练,核心参数包括:
| parser参数 | 说明 |
|---|---|
| num_epochs | 训练批次 |
| learning_rate | 初始学习率 |
| batch_size | 单次样本数量 |
| dataset | 数据集名字 |
| crop_height | 训练时影像重采样尺度 |
数据结构CDDataset_Seg定义在utils文件夹dataset.py中,注意读取后进行了数据增强(随机翻转),灰度化,尺寸调整,标签归一化、 one-hot 编码,以及维度和数据类型的转换,最终得到适用于 PyTorch 模型训练的张量。
# 读取训练图片和标签图片
image_t1 = cv2.imread(image_t1_path,-1)
#image_t2 = cv2.imread(image_t2_path)
label = cv2.imread(label_path)
# 随机进行数据增强,为2时不做处理
if self.data_augment:
flipCode = random.choice([-1, 0, 1, 2])
if flipCode != 2:
# image_t1 = normalized(image_t1, 'tif')
image_t1 = self.augment(image_t1, flipCode)
#image_t2 = self.augment(image_t2, flipCode)
label = self.augment(label, flipCode)
label = cv2.cvtColor(label, cv2.COLOR_BGR2GRAY)
image_t1 = cv2.resize(image_t1, (self.img_h, self.img_w))
#image_t2 = cv2.resize(image_t2, (Config.img_h, Config.img_w))
label = cv2.resize(label, (self.img_h, self.img_w))
label = label/255
label = label.astype('uint8')
label = onehot(label, 2)
label = label.transpose(2, 0, 1)
label = torch.FloatTensor(label)
训练过程如下图所示,模型保存至checkpoints数据集同名文件夹内。
影像测试
运行dp0_AllPre.py,核心参数包括:
| parser参数 | 说明 |
|---|---|
| Checkpointspath | 预训练模型位置名称 |
| Dataset | 批量化预测数据文件夹 |
| Outputpath | 输出数据文件夹 |
数据加载方式:
pre_dataset = CDDataset_Pre(data_path=pre_imgpath1,
img_h=Config.img_h, img_w=Config.img_w,
transform=transforms.Compose([
transforms.ToTensor()]))
pre_dataloader = torch.utils.data.DataLoader(dataset=pre_dataset,
batch_size=1,
shuffle=False,
pin_memory=True,
num_workers=0)
需要注意,预测定义的数据结构CDDataset_Pre与训练时CDDataset_Seg略有区别,主要是不进行label处理。
结果示例
效果太差,理论上不应该,LiteHRNet结构中的分割头
x = self.rep_head(feats)
x = F.interpolate(x, size, mode='bilinear', align_corners=True)
第一个x从rep_head输出, 尺度为128*128,后续有空考虑换分割头测试。

















 1120
1120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









