




Communications Infrastructure
At the lowest level, ROS offers a message passing interface that provides inter-process communication and is commonly referred to as a middleware.
The ROS middleware provides these facilities:
- publish/subscribe anonymous message passing
- recording and playback of messages
- request/response remote procedure calls
- distributed parameter system
Ros的两种基本通信方式 topic and service
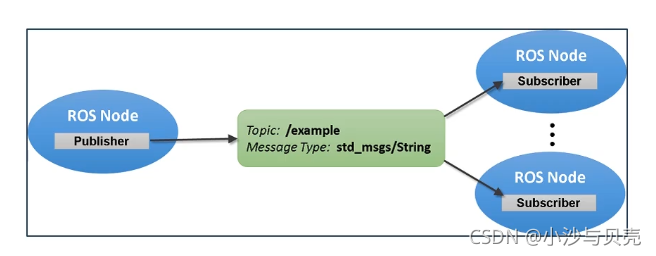
Messages are routed via a transport system with publish / subscribe semantics. A node sends out a message by publishing it to a given topic. The topic is a name that is used to identify the content of the message. A node that is interested in a certain kind of data will subscribe to the appropriate topic。
There may be multiple concurrent publishers and subscribers for a single topic。
Logically, one can think of a topic as a strongly typed message bus. Each bus has a name, and anyone can connect to the bus to send or receive messages as long as they are the right type.
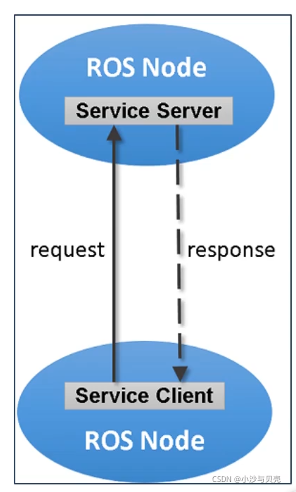
The publish / subscribe model is a very flexible communication paradigm, but its many-to-many, one-way transport is not appropriate for request / reply interactions, which are often required in a distributed system. Request / reply is done via services, which are defined by a pair of message structures: one for the request and one for the reply.
A providing node offers a service under a name and a client uses the service by sending the request message and awaiting the reply. ROS client libraries generally present this interaction to the programmer as if it were a remote procedure call.
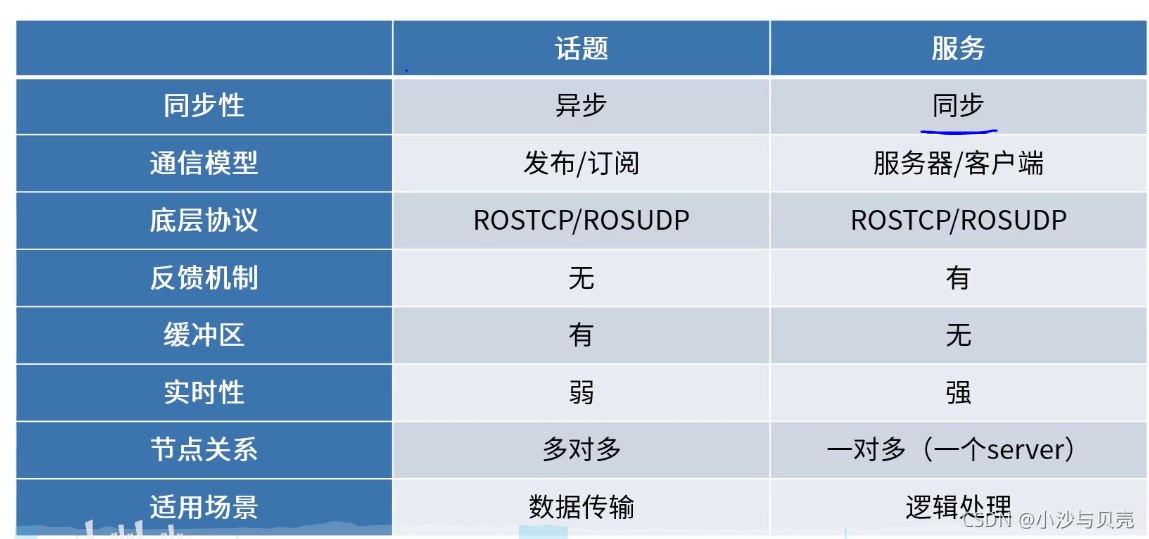
Topic Vs Service:
Bags:
Bags are a format for saving and playing back ROS message data. Bags are an important mechanism for storing data, such as sensor data, that can be difficult to collect but is necessary for developing and testing algorithms.
Messages:
Messages: Nodes communicate with each other by passing messages. A message is simply a data structure。
Standard primitive types (integer, floating point, boolean, etc.) are supported, as are arrays of primitive types. Messages can include arbitrarily nested structures and arrays (much like C structs).
Nodes can also exchange a request and response message as part of a ROS service call. These request and response messages are defined in srv files.


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











