





 在调试EtherCAT轴时,发现轴能正常使能但不受位置指令控制,可能原因是正负扭矩限制被设置为0。驱动器虽然接收到指令,但轴不运动。手动操作时轴可转动,需检查并设置驱动器的60E0和60E1控制字,确保扭矩限制非零,以防止上下轴坠落造成安全风险。对于三菱的EtherCAT驱动器,此设置尤为重要。
在调试EtherCAT轴时,发现轴能正常使能但不受位置指令控制,可能原因是正负扭矩限制被设置为0。驱动器虽然接收到指令,但轴不运动。手动操作时轴可转动,需检查并设置驱动器的60E0和60E1控制字,确保扭矩限制非零,以防止上下轴坠落造成安全风险。对于三菱的EtherCAT驱动器,此设置尤为重要。
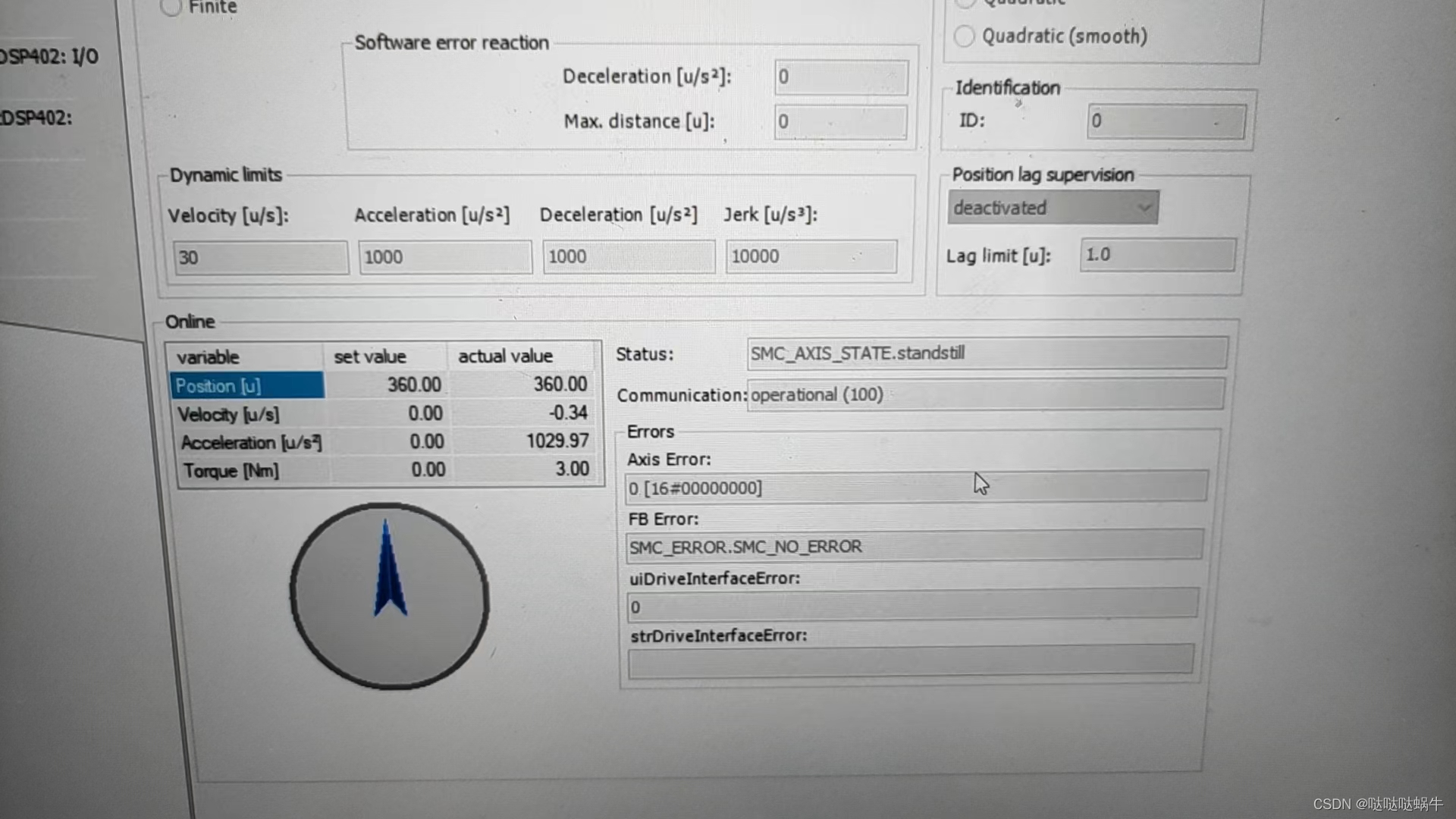
在调试中,遇到EtherCAT轴可以正常使能,但给位置指令不运动的情况,驱动器有收到指令,轴不运动。且手动可拧,大概是将轴的正负最大扭矩限制设置为了0。
轴状态如下:
检查驱动器的正负扭矩限制值是否有值
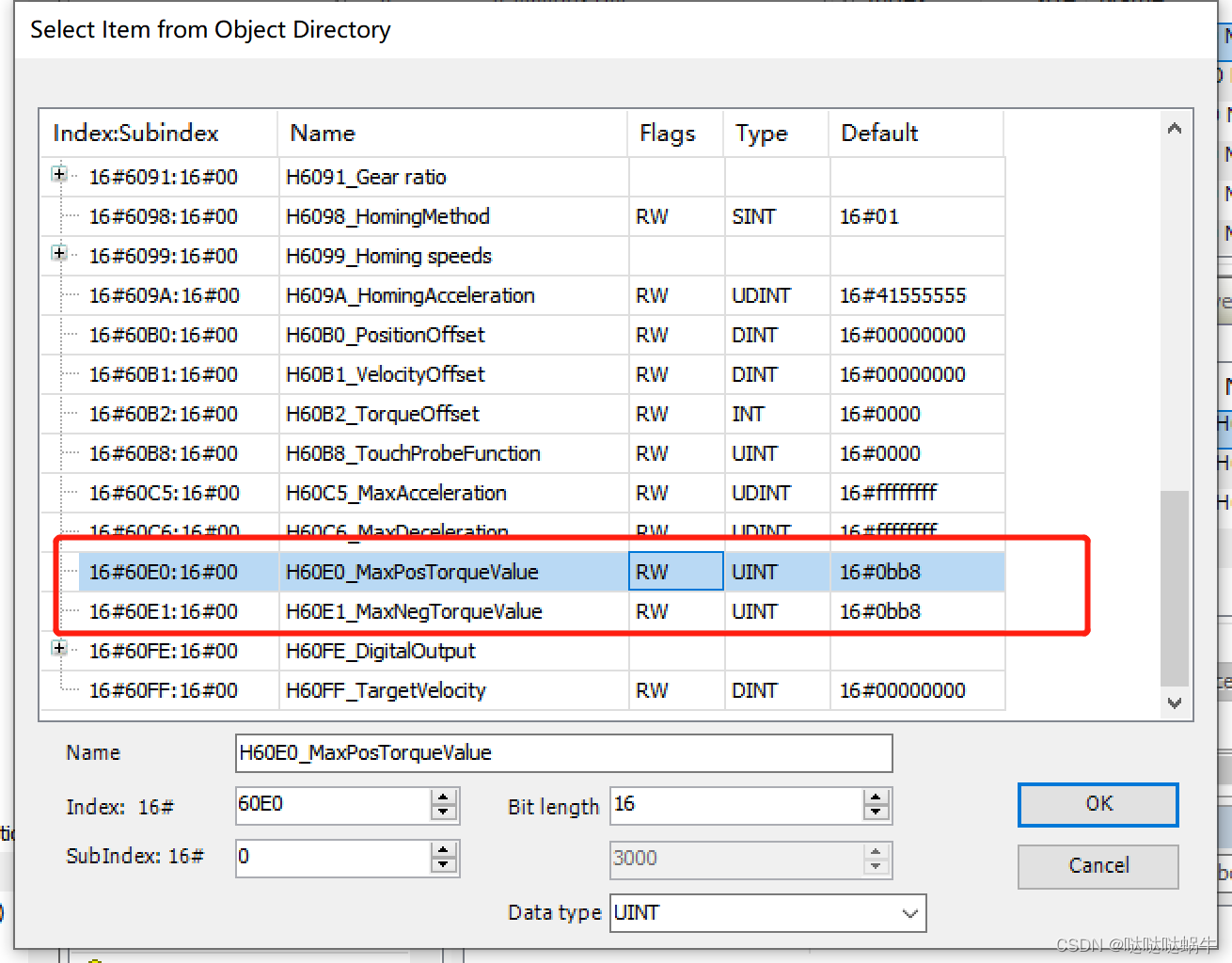
通常是EtherCAT控制字的60E0和60E1。各家名称不同,但是控制字是一样。
目前遇到三菱的EtherCAT驱动器是必须要设置。
这个值也必须要设置,设为0的话,如果是上下轴,会直接坠下,伤到人和机器。需要注意。

在调试中,遇到EtherCAT轴可以正常使能,但给位置指令不运动的情况,驱动器有收到指令,轴不运动。且手动可拧,大概是将轴的正负最大扭矩限制设置为了0。
轴状态如下:
检查驱动器的正负扭矩限制值是否有值
通常是EtherCAT控制字的60E0和60E1。各家名称不同,但是控制字是一样。
目前遇到三菱的EtherCAT驱动器是必须要设置。
这个值也必须要设置,设为0的话,如果是上下轴,会直接坠下,伤到人和机器。需要注意。
 1490
7498
1490
7498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























