







【嵌入式应用13】ROS智能车定位导航仿真
(原赛道自主导航,构建地图再导航)
1.初始化
mkdir -p ~/zjp/racecar_ws/src
cd zjp/racecar_ws/src
catkin_init_workspace

2.克隆 racecar 源代码包并编译
git clone https://github.com/xmy0916/racecar.git
cd ..
修改racecar_gazebo/CMakeLists.txt的opencv路径为自己的opencv build文件夹路径。

catkin_make
加入环境变量:

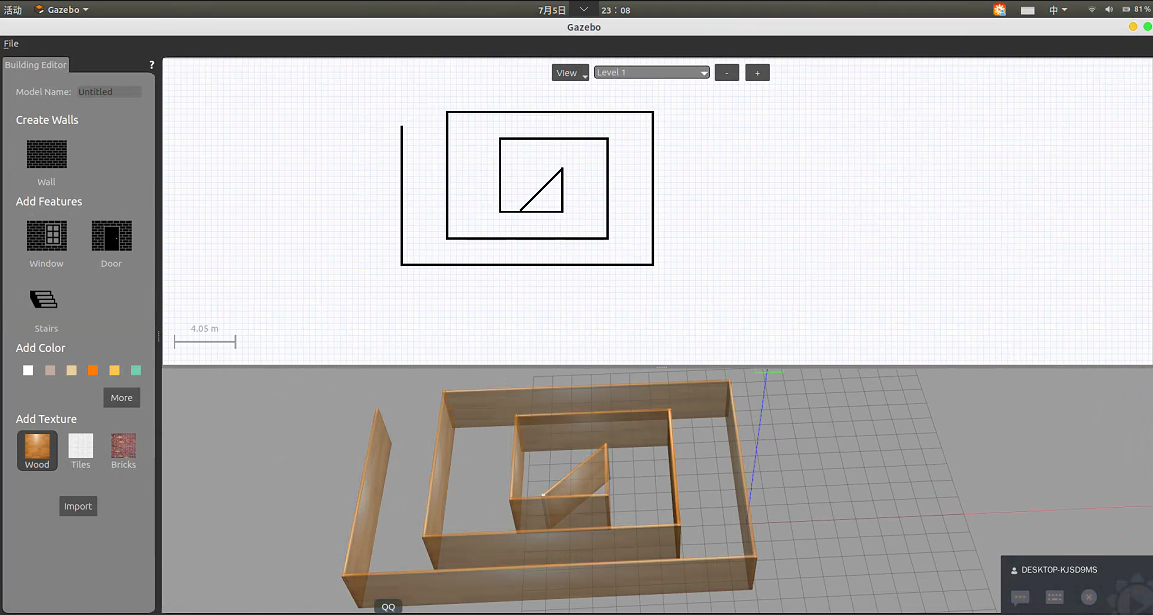
3.自己绘制模型
gazebo
绘制如下图:
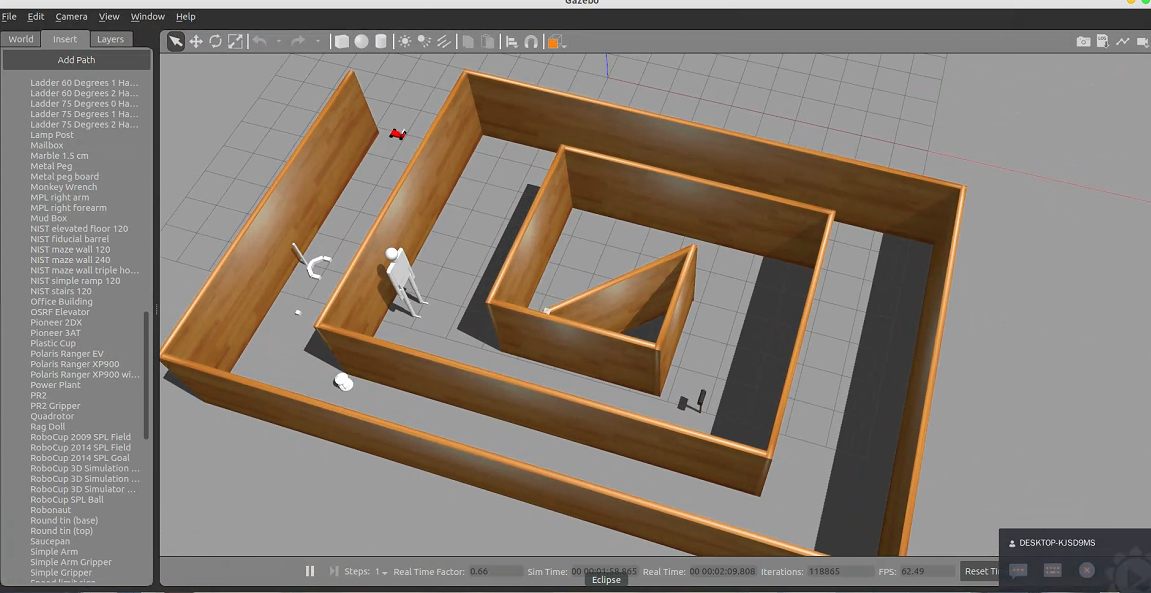
4.构建world
运行小车模型,加入自己的模型,保存为world。
roslaunch racecar_gazebo racecar.launch
构建如下图:
保存在racecar_ws/src/racecar_gazebo/worlds:
5.绘制地图
新建myworld.launch
cd racecar/racecar_gazebo/launch
sudo touch myworld.launch
添加以下代码:
<?xml version="1.0"?>
<launch>
<!-- Launch the racecar -->
<include file="$(find racecar_gazebo)/launch/racecar.launch">
<arg name="world_name"  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









