









 本文详细介绍了如何在stage环境中加载地图,并调整其比例大小。通过实例演示了如何在.world文件中设置加载地图参数,包括名称、位图路径、大小和位置。此外,还提到了在rviz中加载由stage仿真环境生成的地图的方法,以便于进一步的建图和导航工作。
本文详细介绍了如何在stage环境中加载地图,并调整其比例大小。通过实例演示了如何在.world文件中设置加载地图参数,包括名称、位图路径、大小和位置。此外,还提到了在rviz中加载由stage仿真环境生成的地图的方法,以便于进一步的建图和导航工作。
关于stage我们在.world设置加载地图
floorplan
(
name "maze"
bitmap "../maps/maze.png"
size [ 30.0 4.0 2.0 ]
pose [ 5.0 5.0 0.0 0.0 ]
)
这里涉及到加载地图比例大小,需要手动调节哦,体现你灵魂调参的时候到了。
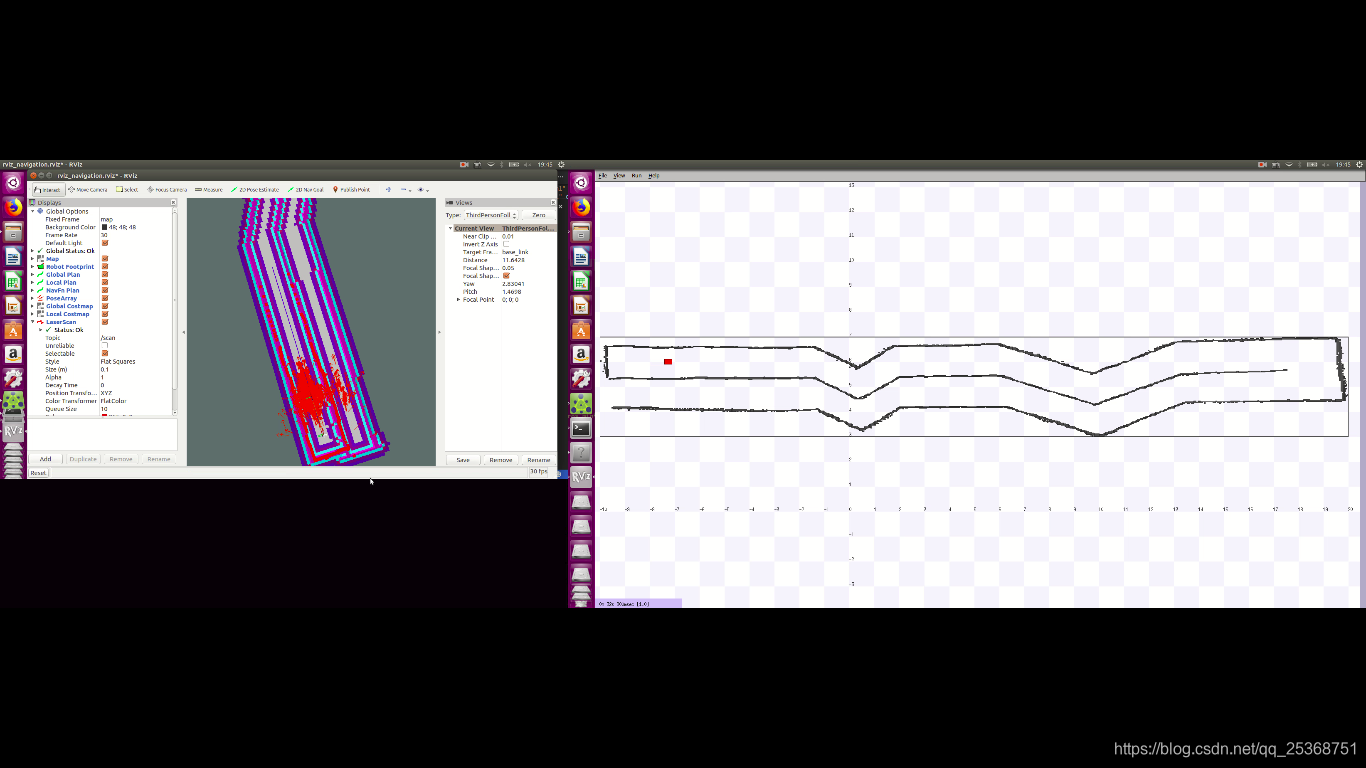
这里的地图并不是rviz中的,在rviz中我们需要在加载一张地图。
根据我的经验最好加载好stage中的地图以后,我们对stage仿真环境进行建图,然后在rviz中加载这张我们建立的地图。


















 4660
4660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











