




 RT-Thread是一个支持多任务的操作系统,通过线程实现任务调度。线程具有独立栈,状态包括就绪、运行、挂起等,优先级0为最高。线程管理包括创建、删除、初始化和脱离。调度器是抢占式的,高优先级线程能立即执行。线程控制块存储线程信息,上下文在切换时保存和恢复。文章还介绍了线程创建、删除函数,以及线程辅助函数如睡眠、让出处理器等。
RT-Thread是一个支持多任务的操作系统,通过线程实现任务调度。线程具有独立栈,状态包括就绪、运行、挂起等,优先级0为最高。线程管理包括创建、删除、初始化和脱离。调度器是抢占式的,高优先级线程能立即执行。线程控制块存储线程信息,上下文在切换时保存和恢复。文章还介绍了线程创建、删除函数,以及线程辅助函数如睡眠、让出处理器等。
目录

RTT线程管理
RT-Thread是支持多任务的操作系统,多任务是通过多线程的方式实现。线程是任务的载体,是RTT中最基本的调度单位。
线程在运行的时候,它自己会认为独占CPU运行
线程执行时的运行环境称为上下文(与之相对应的有中断上下文),具体来说就是各个变量和数据,包括所有的寄存器变量、堆栈、内存信息等。
线程管理特点
RT-Thread 线程管理的主要功能是对线程进行管理和调度,系统中总共存在两类线程,分别是系统线程和用户线程,系统线程是由 RT-Thread 内核创建的线程,用户线程是由应用程序创建的线程,这两类线程都会从内核对象容器中分配线程对象,当线程被删除时,也会被从对象容器中删除。
RT-Thread 的线程调度器是抢占式的,主要的工作就是从就绪线程列表中查找最高优先级线程,保证最高优先级的线程能够被运行,最高优先级的任务一旦就绪,总能得到 CPU 的使用权。
当调度器调度线程切换时,先将当前线程上下文保存起来,当再切回到这个线程时,线程调度器将该线程的上下文信息恢复。(我们在切换完以后,当再次回到之前执行的线程时候,要从被打断的地方重新开始执行,所以我们要将线程上下文先保存起来)线程再被调度之前,我们要保存现场,保存完现场之后再执行高优先级的线程,在我们再调度回来的时候,再恢复现场。但这些不需要我们应用层手动来做。
线程工作机制
线程控制块
线程控制块由结构体 struct rt_thread 表示,线程控制块是操作系统用于管理线程的一个数据结构,它会存放线程的一些信息,例如优先级、线程名称、线程状态等,也包含线程与线程之间连接用的链表结构(内核在管理多个线程的时候,将描述每个线程的结构体采用一个列表的形式来管理起来,为了方便内核后期来查找和管理),线程等待事件集合等。
struct rt_thread
{
/* rt object */
char name[RT_NAME_MAX]; /**<the name of thread */
rt_uint8_t type; /**< type of object */
rt_uint8_t flags; /**< thread's flags */
rt_list_t list; /**< the object list */
rt_list_t tlist; /**< the thread list */
/* stack point and entry */
void *sp; /**< stack point 栈指针*/
void *entry; /**< entry */
void *parameter; /**< parameter */
void *stack_addr; /**< stack address point 栈地址指针*/
rt_uint32_t stack_size; /**< stack size */
/* error code */
rt_err_t error; /**< error code */
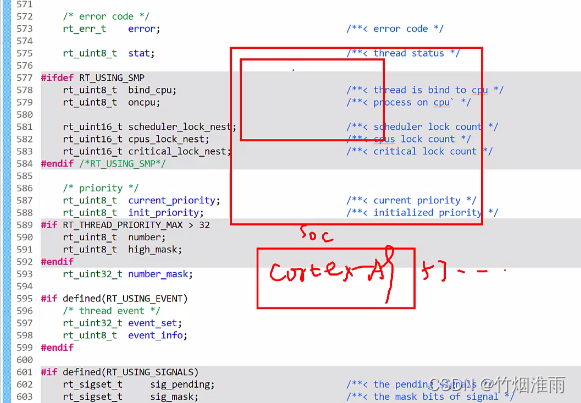
rt_uint8_t stat; /**< thread status 线程状态*/
/* priority */
rt_uint8_t current_priority; /**< current priority */
rt_uint8_t init_priority; /**< initialized priority */
rt_uint32_t number_mask;
...
rt_ubase_t init_tick; /**< thread's initialized tick */
rt_ubase_t remaining_tick; /**< remaining tick */
struct rt_timer thread_timer; /**< built-in thread timer */
void (*cleanup)(struct rt_thread *tid); /**< cleanup function when thread exit */
rt_uint32_t user_data; /**< private user data beyond this thread */
};
其中有个对称多核处理器的功能,如果属于cortex-M系列的处理器,因为是单核,所以不使用对称多核处理器,但cortex-A系统多核支持
注:cleanup函数指针指向的函数,会在线程退出的时候,被idle线程回调一次,执行用户设置的清理现场等工作。
线程属性
- 线程栈
RT-Thread 线程具有独立的栈,当进行线程切换时,会将当前线程的上下文存在栈中,当线程要恢复运行时,再从栈中读取上下文信息,进行恢复。
- 线程状态
可以通过查看线程控制块结构体的flags成员来判断当前线程所处状态
- 线程优先级
RT-Thread 最大支持 256 个线程优先级 (0~255),数值越小的优先级越高,0 为最高优先级。在一些资源比较紧张的系统中,可以根据实际情况选择只支持 8 个或 32 个优先级的系统配置;对于 ARM Cortex-M系列,普遍采用 32 个优先级。最低优先级默认分配给空闲线程使用,用户一般不使用。在系统中,当有比当前线程优先级更高的线程就绪时,当前线程将立刻被换出,高优先级线程抢占处理器运行
- 时间片
每个线程都有时间片这个参数,但时间片仅对优先级相同的就绪态线程有效。(如果多个线程的优先级相同,对于同一优先级的线程,调度的时候根据时间片进行调度,即每个线程调度一段时间然后切换另一个线程来调度执行)
注意:
作为一个实时系统,一个优先级明确的实时系统,如果一个线程中的程序陷入了死循环操作,那么比它优先级低的线程都将不能够得到执行。所以在实时操作系统中必须注意的一点就是:线程中不能陷入死循环操作,必须要有让出 CPU使用权的动作,如循环中调用延时函数或者主动挂起(两种方法都能使线程处于挂起态,挂起态是不参加线程调度的,这时我们的系统就可以调度其它线程去执行)。
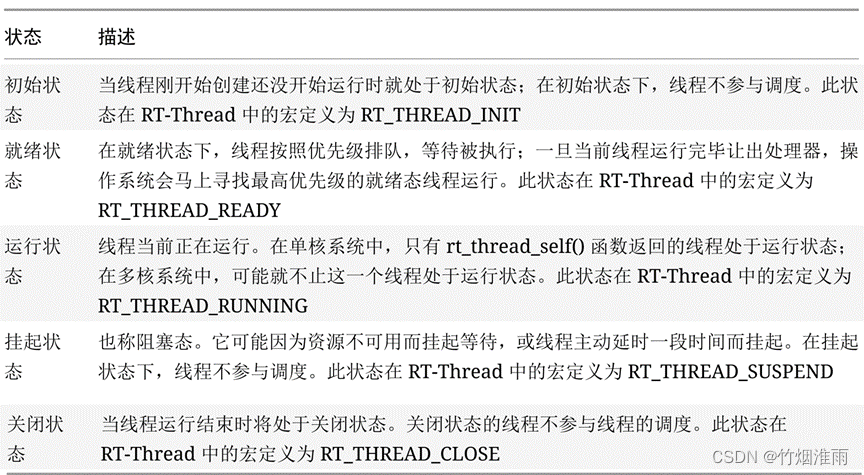
线程状态之间切换
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











